Вам также может понравиться
- Analog Circuit Design Volume Three: Design Note CollectionОт EverandAnalog Circuit Design Volume Three: Design Note CollectionРейтинг: 3 из 5 звезд3/5 (2)
- Tabela de Transformada Z LaplaceДокумент1 страницаTabela de Transformada Z LaplaceVinny Tuk0% (1)
- Electrodes/ADS1298 Interface: ResolvedДокумент10 страницElectrodes/ADS1298 Interface: ResolvedSummer MamunОценок пока нет
- Motorola Saa1042 0587f49ff7Документ6 страницMotorola Saa1042 0587f49ff7Kevin StrongОценок пока нет
- MC1455Документ13 страницMC1455eduardolsОценок пока нет
- WS2801Документ15 страницWS2801Wanderley SenaОценок пока нет
- Mc1455-d Timer IcДокумент11 страницMc1455-d Timer IcDecker JamesОценок пока нет
- DatasheetДокумент9 страницDatasheetnipunkhatriОценок пока нет
- Lm555 555c TimerДокумент12 страницLm555 555c TimerAlexis Orellana VediaОценок пока нет
- FP 6321Документ11 страницFP 6321Ahmed HussainОценок пока нет
- MC 33030Документ17 страницMC 33030wtn2013Оценок пока нет
- MC33030 MotorolaДокумент16 страницMC33030 MotorolaLuiz EduardoОценок пока нет
- Tda 4601Документ8 страницTda 4601Mirko AleksicОценок пока нет
- Transition-Mode PFC Controller: 1 FeaturesДокумент17 страницTransition-Mode PFC Controller: 1 Featuresadriancho66Оценок пока нет
- Data Sheet: IC Timers 555 and 556Документ8 страницData Sheet: IC Timers 555 and 556Adenilson MatiasОценок пока нет
- MC3479 Stepper Motor Driver: FeaturesДокумент10 страницMC3479 Stepper Motor Driver: FeaturesHenry CastandОценок пока нет
- MC34063AMДокумент16 страницMC34063AMSajjad4434Оценок пока нет
- MC34063A, MC33063A, NCV33063A 1.5 A, Step Up/Down/ Inverting Switching RegulatorsДокумент14 страницMC34063A, MC33063A, NCV33063A 1.5 A, Step Up/Down/ Inverting Switching RegulatorsVũ TưởngОценок пока нет
- Datasheet WS2801Документ15 страницDatasheet WS2801Nguyễn Trọng NghĩaОценок пока нет
- Em Lab-II ManualДокумент45 страницEm Lab-II Manualrkadiraj701150% (4)
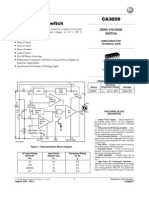
- CA3059Документ9 страницCA3059chinametalОценок пока нет
- Ca 3524Документ20 страницCa 3524rmsharma1970Оценок пока нет
- LM555 Timer: General Description FeaturesДокумент12 страницLM555 Timer: General Description FeaturesMark J A. OkyoОценок пока нет
- Mc1455u - DatasheetДокумент10 страницMc1455u - Datasheetmark777markОценок пока нет
- Datasheet Fairchild UC3843Документ7 страницDatasheet Fairchild UC3843Tina JohnsonОценок пока нет
- 3ph Ac Motor ControlerДокумент11 страниц3ph Ac Motor Controleradamkam1111Оценок пока нет
- UC3845Документ13 страницUC3845roozbehxoxОценок пока нет
- UC3843 DatasheetДокумент13 страницUC3843 DatasheetBigbrain99Оценок пока нет
- Fan 7314Документ14 страницFan 7314Kamal NonekОценок пока нет
- Smart Voltage Stabilizer Using PIC16F877AДокумент8 страницSmart Voltage Stabilizer Using PIC16F877AAswathy CjОценок пока нет
- Ci Driver Do Motor Do CD Rom DatasheetДокумент11 страницCi Driver Do Motor Do CD Rom DatasheetAdriano TameouvindoОценок пока нет
- LM555 Timer: Literature Number: SNAS548BДокумент14 страницLM555 Timer: Literature Number: SNAS548BKenly WallОценок пока нет
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverДокумент26 страницVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksОценок пока нет
- NE555Документ6 страницNE555Sebastian DavidОценок пока нет
- 220v DC Motor Speed Control Using Ic RegulatorДокумент14 страниц220v DC Motor Speed Control Using Ic RegulatorZagorchillo0% (1)
- MC33030PДокумент17 страницMC33030PGisela ValdezОценок пока нет
- Design Guideline For Flyback Charger Using FAN302HL/ULДокумент20 страницDesign Guideline For Flyback Charger Using FAN302HL/ULteomondoОценок пока нет
- Semiconductor Technical Data Zero Voltage SwitchДокумент6 страницSemiconductor Technical Data Zero Voltage SwitchMuresan SanduОценок пока нет
- Reversible Motor Driver: BA6209 / BA6209NДокумент8 страницReversible Motor Driver: BA6209 / BA6209NLaurentiu IacobОценок пока нет
- 28V 2A Step-Down Switching Regulator: Power Management Features DescriptionДокумент19 страниц28V 2A Step-Down Switching Regulator: Power Management Features DescriptionLuis Espino PérezОценок пока нет
- 1/2/3-Phase Quick-PWM IMVP-6.5 VID Controllers: General Description FeaturesДокумент39 страниц1/2/3-Phase Quick-PWM IMVP-6.5 VID Controllers: General Description FeaturesSunil SuwarnkarОценок пока нет
- Uc 3906Документ9 страницUc 3906ป๊ะป๋า ณัฐОценок пока нет
- Thb7128 InstructionsДокумент9 страницThb7128 InstructionsanhxcoОценок пока нет
- Application Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Документ16 страницApplication Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Malanie Sriya De SilvaОценок пока нет
- BA6209Документ9 страницBA6209sontuyet82Оценок пока нет
- LMC555 CMOS Timer: General Description FeaturesДокумент10 страницLMC555 CMOS Timer: General Description FeaturesJeremy ObriotОценок пока нет
- SM72441 Programmable Maximum Power Point Tracking Controller For Photovoltaic Solar PanelsДокумент10 страницSM72441 Programmable Maximum Power Point Tracking Controller For Photovoltaic Solar PanelsShahid SiddiqueОценок пока нет
- And8328 DДокумент8 страницAnd8328 DJonatan LunaОценок пока нет
- Sla7024m (Motor Driver)Документ13 страницSla7024m (Motor Driver)Franklin Miranda RoblesОценок пока нет
- Datasheet Controlaor CiДокумент17 страницDatasheet Controlaor Cineta123abcОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОт EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОценок пока нет
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)От EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Оценок пока нет
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsОт EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsРейтинг: 3.5 из 5 звезд3.5/5 (6)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- MSP 430 G 2553Документ75 страницMSP 430 G 2553diosb3Оценок пока нет
- Tutorial AutoCad Electrical 2016Документ169 страницTutorial AutoCad Electrical 2016khoirul hudaОценок пока нет
- CCSv4 Tips & TricksДокумент48 страницCCSv4 Tips & TricksShyam SundarОценок пока нет
- Acad Elec 2010 GetstartДокумент255 страницAcad Elec 2010 GetstartTosu FlorinОценок пока нет
- Acad Elec 2010 GetstartДокумент255 страницAcad Elec 2010 GetstartTosu FlorinОценок пока нет
- MSP 430 G 2553Документ75 страницMSP 430 G 2553diosb3Оценок пока нет
- Acad Elec 2010 GetstartДокумент255 страницAcad Elec 2010 GetstartTosu FlorinОценок пока нет
- MicroTech III - Rooftop and Self Contained Unit Controller - BACnet Communication Module MS TP - IM - 917-2 PDFДокумент16 страницMicroTech III - Rooftop and Self Contained Unit Controller - BACnet Communication Module MS TP - IM - 917-2 PDFVinny TukОценок пока нет
- Modbus RTU PDFДокумент39 страницModbus RTU PDFVinny TukОценок пока нет
- MSM 58321Документ17 страницMSM 58321Vinny TukОценок пока нет
- Tutorial Programacion USER RPL (HP50g)Документ46 страницTutorial Programacion USER RPL (HP50g)Luis MejiaОценок пока нет
- LCD 16x2 - GDM1602K-ExtendedДокумент0 страницLCD 16x2 - GDM1602K-ExtendedVinny TukОценок пока нет
- Humedad y TemperaturaДокумент8 страницHumedad y TemperaturaNisperin D'iОценок пока нет
- MSM 58321Документ17 страницMSM 58321Vinny TukОценок пока нет
- Analog Electronics IДокумент2 страницыAnalog Electronics IsimrankhokhaОценок пока нет
- Design of Cmos BufferДокумент5 страницDesign of Cmos BufferVarunKaradesaiОценок пока нет
- DFJ-AE3 Heat DetectorДокумент1 страницаDFJ-AE3 Heat Detectorwe202Оценок пока нет
- 2.what Are The Limitations of Integrated Circuits? 1. 2Документ6 страниц2.what Are The Limitations of Integrated Circuits? 1. 220EUEE053- MADHUBALAN.SОценок пока нет
- Module 4 QuestionsДокумент7 страницModule 4 QuestionsamaiscОценок пока нет
- Electronics Lab ReportsДокумент46 страницElectronics Lab ReportsDanilyn Padillo LucioОценок пока нет
- 5GHz VCOДокумент5 страниц5GHz VCOnavinrkОценок пока нет
- VLSI Lab MannualДокумент107 страницVLSI Lab MannualSadananda KrrishОценок пока нет
- Bias Circuit Design For Microwave AmplifiersДокумент7 страницBias Circuit Design For Microwave AmplifiersPhilippeaОценок пока нет
- SRM Lab ManualДокумент102 страницыSRM Lab ManualAnshul SureshОценок пока нет
- Ina 114Документ17 страницIna 114Moditha LakshanОценок пока нет
- GMX MNLДокумент29 страницGMX MNLAndreiCabaОценок пока нет
- Filter: All of TheseДокумент24 страницыFilter: All of TheseMansoor AslamОценок пока нет
- Unit-2 BJT PrintДокумент22 страницыUnit-2 BJT PrintAhan TejaswiОценок пока нет
- LEC 01 Class D Audio Amplifiers 1Документ7 страницLEC 01 Class D Audio Amplifiers 1Angel ZumbaОценок пока нет
- Tuen Voltage AmplifirДокумент8 страницTuen Voltage Amplifirkaran007_mОценок пока нет
- Dan Li JSSC June2014Документ11 страницDan Li JSSC June2014nandish mehta100% (1)
- Datasheet PDFДокумент1 страницаDatasheet PDFLe DungОценок пока нет
- Syllabus For I Year EceДокумент5 страницSyllabus For I Year EceBramwell Samuel KumarОценок пока нет
- BJT-Transistor AnalysisДокумент100 страницBJT-Transistor AnalysisParesh SawantОценок пока нет
- Fold-Cascode OPДокумент11 страницFold-Cascode OPLinAm AmatariyakulОценок пока нет
- Delhi Public School Gwalior: Investigatory Project 2018-2019 PhysicsДокумент22 страницыDelhi Public School Gwalior: Investigatory Project 2018-2019 PhysicsAryan TripathiОценок пока нет
- Lab#9 (Common Emitter Amplifier)Документ6 страницLab#9 (Common Emitter Amplifier)Muhammad HamzaОценок пока нет
- AD8426Документ29 страницAD8426Nisar AhmedОценок пока нет
- Class BДокумент5 страницClass BAnonymous eWMnRr70qОценок пока нет
- Quad, 3.5Mhz, Operational Amplifier Features: Data Sheet September 1998 File Number 2922.3Документ6 страницQuad, 3.5Mhz, Operational Amplifier Features: Data Sheet September 1998 File Number 2922.3Andi FebriantoОценок пока нет
- High-Quality Audio Amplifier With Automatic Bias ControlДокумент4 страницыHigh-Quality Audio Amplifier With Automatic Bias Controlandree wОценок пока нет
- Features: DescriptioДокумент12 страницFeatures: DescriptioMojtaba TorkiОценок пока нет
- D5954Документ6 страницD5954rdbassesОценок пока нет