Вам также может понравиться
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionОт EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionОценок пока нет
- Electrical Instrumentation and Measurements Lab Manual UpdatedДокумент92 страницыElectrical Instrumentation and Measurements Lab Manual UpdatedEzaz Hussain100% (1)
- Evaluation of The Transient Response of A DC MotorДокумент6 страницEvaluation of The Transient Response of A DC MotorNesuh MalangОценок пока нет
- Lab Manual - TheoryДокумент49 страницLab Manual - TheoryLovely VinayОценок пока нет
- Chap. 8 Integrated-Circuit Logic Families: Chapter Outcomes (Objectives)Документ62 страницыChap. 8 Integrated-Circuit Logic Families: Chapter Outcomes (Objectives)estraj1954Оценок пока нет
- EC403: Microwave & Radar EngineeringДокумент70 страницEC403: Microwave & Radar EngineeringBindu Narayanan NampoothiriОценок пока нет
- Introduction To Cmos Vlsi Design: Silicon-on-Insulator (SOI)Документ27 страницIntroduction To Cmos Vlsi Design: Silicon-on-Insulator (SOI)TygerYashanshuОценок пока нет
- The Copperbelt University School of Mathematics and Natural Sciences Department of Physics PH 110 Introductory PhysicsДокумент3 страницыThe Copperbelt University School of Mathematics and Natural Sciences Department of Physics PH 110 Introductory PhysicsLazy BanditОценок пока нет
- Lab 6Документ12 страницLab 6Sujan HeujuОценок пока нет
- Translational Mechanical System Transfer FunctionsДокумент30 страницTranslational Mechanical System Transfer FunctionsRhizhailОценок пока нет
- Tut 3Документ3 страницыTut 3mohanrajgupta1950% (2)
- Sheet MicorДокумент42 страницыSheet MicorFiras TaherОценок пока нет
- Lab Manual - EEE 402 - Exp01 July2014Документ7 страницLab Manual - EEE 402 - Exp01 July2014AhammadSifatОценок пока нет
- Equations of Motion NotesДокумент12 страницEquations of Motion NotesSurya Phani Krishna NukalaОценок пока нет
- Manual SMC Dialog Plus Controller. Allen BradleyДокумент189 страницManual SMC Dialog Plus Controller. Allen BradleygreenlinexОценок пока нет
- DLD Lab Manual 7 FlipFlopsДокумент6 страницDLD Lab Manual 7 FlipFlopsHanzala NasirОценок пока нет
- Hybrid Low Radix Encoding-Based Approximate Booth MultipliersДокумент33 страницыHybrid Low Radix Encoding-Based Approximate Booth MultipliersAKASHDEEP MITRA100% (1)
- Bode Plots: Multiple Choice Questions For Online ExamДокумент23 страницыBode Plots: Multiple Choice Questions For Online ExamRajeev Singh BishtОценок пока нет
- Tutorial 1 Drawing A Transistor Sensing CircuitДокумент7 страницTutorial 1 Drawing A Transistor Sensing CircuitFernando ValenteОценок пока нет
- Basic Concept For Electrical DesigningДокумент2 страницыBasic Concept For Electrical DesigningJoel RemegioОценок пока нет
- Routh Criterion - Tutorial 7 - Co - 12Документ3 страницыRouth Criterion - Tutorial 7 - Co - 12Haelu KuОценок пока нет
- p13 - Behavioral Modeling of LDO PDFДокумент10 страницp13 - Behavioral Modeling of LDO PDFTitan FredОценок пока нет
- 1 Flexible Link ProjectДокумент15 страниц1 Flexible Link Projectprasaad08Оценок пока нет
- Tutorial On ScilabДокумент82 страницыTutorial On ScilabAbril de VeraОценок пока нет
- Lab 5 ControlДокумент6 страницLab 5 ControlAyaz AhmadОценок пока нет
- Chapter1 Fundamentals of Microwave EngineeringДокумент37 страницChapter1 Fundamentals of Microwave Engineeringtranhieu_hcmutОценок пока нет
- Fundamental Design GoalsДокумент3 страницыFundamental Design Goalslilsoldier50% (2)
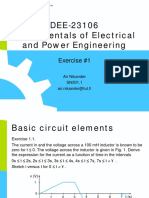
- DEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1Документ12 страницDEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1shoptodipОценок пока нет
- EI6702-Logic and Distributed Control System PDFДокумент15 страницEI6702-Logic and Distributed Control System PDFlionelprakzy100% (1)
- Frequency Divider: ObjectiveДокумент5 страницFrequency Divider: ObjectiveNour Youssef100% (1)
- A Verilog-A Cycle-To-cycle Jitter Measurement ModulДокумент4 страницыA Verilog-A Cycle-To-cycle Jitter Measurement ModulLi FeiОценок пока нет
- Computer OrganisationДокумент71 страницаComputer OrganisationAnuragGuptaОценок пока нет
- 12 - Operational AmplifiersДокумент27 страниц12 - Operational Amplifierssgw67Оценок пока нет
- Solutions To Skill Assessment ProblemsДокумент53 страницыSolutions To Skill Assessment ProblemsMuhammad ArslanОценок пока нет
- Mmwave Studio User GuideДокумент81 страницаMmwave Studio User Guide王識傑Оценок пока нет
- State Errors - Steady: Eman Ahmad KhalafДокумент28 страницState Errors - Steady: Eman Ahmad KhalafAhmed Mohammed khalfОценок пока нет
- Lab-4 (Solution by Adnan)Документ11 страницLab-4 (Solution by Adnan)Muhammad Adnan0% (1)
- Electronic Devices Used in Power Electronics Characteristics ComparisonДокумент12 страницElectronic Devices Used in Power Electronics Characteristics ComparisonEysha qureshiОценок пока нет
- EMTKnodia PDFДокумент765 страницEMTKnodia PDFbineshОценок пока нет
- Chapter 5 Problems CMOS INVERTERДокумент8 страницChapter 5 Problems CMOS INVERTERShykh SheharyarОценок пока нет
- M01 Opnet MM1Документ35 страницM01 Opnet MM1Engr. Sohaib JamalОценок пока нет
- Ec8361-Adc Lab ManualДокумент118 страницEc8361-Adc Lab ManualmuminthajОценок пока нет
- M Lab Report 5Документ9 страницM Lab Report 5marryam nawazОценок пока нет
- FM 2151Документ82 страницыFM 2151Nafeesa SalehОценок пока нет
- Unit-IV-Induction MotorsДокумент57 страницUnit-IV-Induction MotorssujithОценок пока нет
- EEE 2019 Lecture 4Документ30 страницEEE 2019 Lecture 4Emment ChromaОценок пока нет
- Lab 3.5.2 Challenge Frame Relay ConfigurationДокумент4 страницыLab 3.5.2 Challenge Frame Relay ConfigurationMark Zovighian0% (1)
- Lab 591 - B Analysis and Design of CSДокумент2 страницыLab 591 - B Analysis and Design of CSDevine WriterОценок пока нет
- D 01Документ209 страницD 01Raj Boda0% (1)
- P08 BlockCodes SolДокумент13 страницP08 BlockCodes SolebenpradeepОценок пока нет
- Circuit Analysis 2 Lab Report 2 Pieas PakistanДокумент6 страницCircuit Analysis 2 Lab Report 2 Pieas PakistanMUYJ NewsОценок пока нет
- Exam MEP1553 Apr2010Документ7 страницExam MEP1553 Apr2010Abid JamaliОценок пока нет
- StabilityДокумент16 страницStabilitythankamonyОценок пока нет
- Mohamoud Project Final ReportДокумент12 страницMohamoud Project Final ReportVIJAYA LAXMIОценок пока нет
- Viva Quastions SegwayДокумент11 страницViva Quastions SegwayEr Md AamirОценок пока нет
- Me3112 2 Lab Dynamic Balancing Amp Gyroscopic EffectsДокумент12 страницMe3112 2 Lab Dynamic Balancing Amp Gyroscopic EffectsDenise Isebella LeeОценок пока нет
- Dynamics Tutorial 7-Kinematiks-Velocity and Acceleration Diagrams-31p PDFДокумент31 страницаDynamics Tutorial 7-Kinematiks-Velocity and Acceleration Diagrams-31p PDFmanfredm6435Оценок пока нет
- Odom TutorialДокумент15 страницOdom TutorialbungabongaОценок пока нет
- Team C - Implementation of PID Control Using Inverted PendulumДокумент23 страницыTeam C - Implementation of PID Control Using Inverted PendulumHHОценок пока нет
- Sensible HeatДокумент31 страницаSensible Heat12001301100% (2)
- Cie Earth Tester.187133635Документ3 страницыCie Earth Tester.187133635velan84Оценок пока нет
- Diagram of Vitamix Blade Blade Assembly: InstructionsДокумент5 страницDiagram of Vitamix Blade Blade Assembly: InstructionsRenato PurcinoОценок пока нет
- Is Standard ListДокумент11 страницIs Standard ListSunil PulikkalОценок пока нет
- Advanced Microscopy Simplifi Ed: Bx53M/BxfmДокумент28 страницAdvanced Microscopy Simplifi Ed: Bx53M/BxfmRepresentaciones y Distribuciones FALОценок пока нет
- AGC IPC Slash Sheet ReferenceДокумент4 страницыAGC IPC Slash Sheet ReferenceSelvakumar NatarajanОценок пока нет
- Compact FlashДокумент9 страницCompact Flashenpr87reddyОценок пока нет
- The Voice: and The Musical InstrumentsДокумент12 страницThe Voice: and The Musical InstrumentsnireadaetaОценок пока нет
- Applsci 12 02711 v2Документ31 страницаApplsci 12 02711 v2Chandra MouliОценок пока нет
- MT Company PresentationДокумент30 страницMT Company Presentationjose manuelОценок пока нет
- Pd-Coated Wire Bonding Technology - Chip Design, Process Optimization, Production Qualification and Reliability Test For HIgh Reliability Semiconductor DevicesДокумент8 страницPd-Coated Wire Bonding Technology - Chip Design, Process Optimization, Production Qualification and Reliability Test For HIgh Reliability Semiconductor Devicescrazyclown333100% (1)
- HIDROMONTAŽA - We Change EverythingДокумент1 страницаHIDROMONTAŽA - We Change EverythingsamccoОценок пока нет
- Kumar Saurabh Resume (SAP IBP)Документ6 страницKumar Saurabh Resume (SAP IBP)SaurabhSinhaОценок пока нет
- CeldekДокумент2 страницыCeldekPK SinghОценок пока нет
- Answers For SummariesДокумент6 страницAnswers For SummariesDaphneОценок пока нет
- ACC Flow Chart (Whole Plan) - Rev00Документ20 страницACC Flow Chart (Whole Plan) - Rev00amandeep12345Оценок пока нет
- DatasheetДокумент4 страницыDatasheetJs CameloОценок пока нет
- CYMTCC For Windows: User's Guide and Reference ManualДокумент290 страницCYMTCC For Windows: User's Guide and Reference ManualJosselynGalloMuñozОценок пока нет
- Broadcast Tools Site Sentinel 4 Install Op Manual v2 12-01-2009Документ41 страницаBroadcast Tools Site Sentinel 4 Install Op Manual v2 12-01-2009testeemailОценок пока нет
- Vatan Katalog 2014Документ98 страницVatan Katalog 2014rasko65Оценок пока нет
- Impact of Computer On SocietyДокумент4 страницыImpact of Computer On SocietyraheelОценок пока нет
- Oct 15 Action Research PLT AgendaДокумент2 страницыOct 15 Action Research PLT Agendaapi-231962429Оценок пока нет
- Methodology: Procedure For Checking of VerticalityДокумент6 страницMethodology: Procedure For Checking of VerticalityDinesh Kumar PatelОценок пока нет
- Delta Tester 9424 Training ModuleДокумент35 страницDelta Tester 9424 Training ModuleNini FarribasОценок пока нет
- REST Society For Research International: Rsri Membership Application FormДокумент1 страницаREST Society For Research International: Rsri Membership Application FormmeenasarathaОценок пока нет
- Ijmemr V3i1 009Документ5 страницIjmemr V3i1 009Sandesh SanОценок пока нет
- Template Extended-AbstractДокумент3 страницыTemplate Extended-AbstractGraita PurwitasariОценок пока нет
- XII Bahasa Inggris No. 16-18Документ3 страницыXII Bahasa Inggris No. 16-18Auryn AnastashaОценок пока нет
- ATM Storage TankДокумент10 страницATM Storage TanksameerpecОценок пока нет
- TemplateДокумент17 страницTemplatedaveОценок пока нет