Вам также может понравиться
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryДокумент6 страницExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalОценок пока нет
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- Electronic Circuits & Logic Design Lab ManualДокумент83 страницыElectronic Circuits & Logic Design Lab ManualsunandaalurОценок пока нет
- Calculating Induced Voltage in Parallel CablesДокумент51 страницаCalculating Induced Voltage in Parallel CablesAhmed Sabri0% (1)
- Part BДокумент10 страницPart BVenkat ManiОценок пока нет
- Vector Analysis NotesДокумент765 страницVector Analysis NotesbineshОценок пока нет
- Three Phase Uncontrolled Rectifiers: Notes From MURДокумент9 страницThree Phase Uncontrolled Rectifiers: Notes From MURRavi Anand100% (1)
- Experiment 3 Economic Load DispatchДокумент12 страницExperiment 3 Economic Load DispatchMahesh KambleОценок пока нет
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestДокумент3 страницыExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalОценок пока нет
- Lab Session 2: Mathematical Modeling and Solving Differential Equations in MATLABДокумент36 страницLab Session 2: Mathematical Modeling and Solving Differential Equations in MATLABmuhammadОценок пока нет
- Bifpcl Question Solve - 2015: R 5+3+2 10 V 20+20 40 Sor 10 P 40 / (4 X 10)Документ7 страницBifpcl Question Solve - 2015: R 5+3+2 10 V 20+20 40 Sor 10 P 40 / (4 X 10)Mazharul HaqueОценок пока нет
- 3 Eee Pe PDFДокумент107 страниц3 Eee Pe PDFjose19313922Оценок пока нет
- PART IV. Instrument TransformersДокумент30 страницPART IV. Instrument TransformersuplbselesОценок пока нет
- DC-DC ConvertersДокумент30 страницDC-DC ConvertersTema HassanОценок пока нет
- Induction Motor Electric BrakingДокумент12 страницInduction Motor Electric Brakingmastanamma.Y100% (1)
- 5 Electric Flux Density and Gauss's LawДокумент26 страниц5 Electric Flux Density and Gauss's LawMarc Rivera0% (1)
- Determination of BHДокумент7 страницDetermination of BHDina Garan100% (2)
- Question Bank Ac MachinesДокумент4 страницыQuestion Bank Ac Machinesashwin paulОценок пока нет
- MATLAB Plots for Transfer Function AnalysisДокумент6 страницMATLAB Plots for Transfer Function AnalysisPuduru BharathiОценок пока нет
- Experiment:-7 Aim: To Study The Operation of Resistance Firing Circuit Using R, RC & UJT Firing Module. ApparatusДокумент6 страницExperiment:-7 Aim: To Study The Operation of Resistance Firing Circuit Using R, RC & UJT Firing Module. ApparatusNikhil BindalОценок пока нет
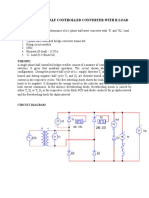
- Single Phase Half Controlled Converter With R LoadДокумент3 страницыSingle Phase Half Controlled Converter With R LoadB ANIL KUMARОценок пока нет
- DC Machines: Parts of DC MachineДокумент51 страницаDC Machines: Parts of DC MachineKUMARОценок пока нет
- Assignment 2Документ8 страницAssignment 2phultushiblsОценок пока нет
- Speed Torque Characteristics of 3 Phase Induction MotorДокумент4 страницыSpeed Torque Characteristics of 3 Phase Induction MotorAdi AdnanОценок пока нет
- SPEED TIME CURVES FOR ELECTRICAL TRACTION SERVICESДокумент21 страницаSPEED TIME CURVES FOR ELECTRICAL TRACTION SERVICESFrozen BoyОценок пока нет
- Economic Load Dispatch Solution Neglecting LossesДокумент21 страницаEconomic Load Dispatch Solution Neglecting LossesRAJESH ROYОценок пока нет
- Sect2-3 PDFДокумент10 страницSect2-3 PDFBlaiseОценок пока нет
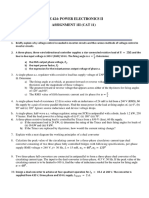
- ECE 424: POWER ELECTRONICS II ASSIGNMENT (CAT 11Документ2 страницыECE 424: POWER ELECTRONICS II ASSIGNMENT (CAT 11Amos Atandi0% (1)
- Practical ExamДокумент2 страницыPractical ExamIrfan AliОценок пока нет
- IARE AC Machines Lab ManualДокумент52 страницыIARE AC Machines Lab ManualNaveen KumarОценок пока нет
- Retardation TestДокумент5 страницRetardation TestAnkit Shetty100% (1)
- Chapter 3: Ac Power AnalysisДокумент40 страницChapter 3: Ac Power AnalysisAtyia Javed100% (1)
- Transformer Design Module 2 NewДокумент17 страницTransformer Design Module 2 NewRajath SuryaОценок пока нет
- EE309 Notes 07 PDFДокумент4 страницыEE309 Notes 07 PDFbals123456100% (1)
- HET 225 HEt 228 Tutorial 3 Solution S2 2014Документ4 страницыHET 225 HEt 228 Tutorial 3 Solution S2 2014Ibrahim Hussain0% (1)
- Unit6 Resonance Circuit (VTU)Документ23 страницыUnit6 Resonance Circuit (VTU)fanah_13100% (1)
- Glover 10 ExДокумент13 страницGlover 10 ExAseel Bait MaditОценок пока нет
- EE1000 Problem Single Phase AC CircuitsДокумент4 страницыEE1000 Problem Single Phase AC CircuitsAmit DipankarОценок пока нет
- Chapter Five: Ac-Ac Conversion: Ac Voltage ControllerДокумент56 страницChapter Five: Ac-Ac Conversion: Ac Voltage Controllerfor lifeОценок пока нет
- Design Considerations For An LLC Resonant ConverterДокумент29 страницDesign Considerations For An LLC Resonant Converterbacuoc.nguyen356Оценок пока нет
- Electrical Machines I Lab Twisted QuestionsДокумент4 страницыElectrical Machines I Lab Twisted QuestionsPranav MenonОценок пока нет
- Lecture 1-Single-Phase-Controlled-RectifiersДокумент41 страницаLecture 1-Single-Phase-Controlled-RectifiersmadihaОценок пока нет
- Hopkinson Test On DC Shunt MotorДокумент5 страницHopkinson Test On DC Shunt MotorVarun VadluriОценок пока нет
- DR BU Static Rotor Resistance ControlДокумент4 страницыDR BU Static Rotor Resistance ControlSameer GulshanОценок пока нет
- Philadelphia University Final Exam for Power Electronics CourseДокумент4 страницыPhiladelphia University Final Exam for Power Electronics CourseSaif UddinОценок пока нет
- Electrostatic Field: Electromagnetic Fields & WavesДокумент64 страницыElectrostatic Field: Electromagnetic Fields & WavesTaha Al-abedОценок пока нет
- Publication 1 19208 6043Документ13 страницPublication 1 19208 6043Stephen Velasco Villaruz0% (1)
- AC Voltage Controller: Shahid IqbalДокумент39 страницAC Voltage Controller: Shahid IqbalZack ZoldyckОценок пока нет
- Eee-Vi-power System Analysis and Stability (10ee61) - NotesДокумент119 страницEee-Vi-power System Analysis and Stability (10ee61) - NotesNurul Islam Faruk0% (1)
- Emf Equation of AlternatorДокумент2 страницыEmf Equation of AlternatorThe Engineers EDGE, CoimbatoreОценок пока нет
- Solid State Drives Short BookДокумент48 страницSolid State Drives Short BookGomathi Raja MОценок пока нет
- High Voltage Engineering Lec2Документ14 страницHigh Voltage Engineering Lec2nasirvivacОценок пока нет
- AC-DC Converter - DДокумент39 страницAC-DC Converter - DBishnu100% (1)
- Three Phase InverterДокумент27 страницThree Phase InverterManoj SunchauriОценок пока нет
- Ch5 - Cooling of Power Semiconductor Devices PDFДокумент56 страницCh5 - Cooling of Power Semiconductor Devices PDFmagicalmarshmallowОценок пока нет
- Transient Behavior and Initial ConditionsДокумент20 страницTransient Behavior and Initial ConditionsTanuja VОценок пока нет
- Tutorial 1 - Basic Concepts in Power ElectronicsДокумент7 страницTutorial 1 - Basic Concepts in Power ElectronicsJohn Appleseed100% (1)
- Acdc - Synchronous Motor - Lecture Notes 9Документ19 страницAcdc - Synchronous Motor - Lecture Notes 9Cllyan Reyes100% (1)
- Control System Lab ManualДокумент63 страницыControl System Lab ManualkrishnandrkОценок пока нет
- DCДокумент3 страницыDCTauqeer KhanОценок пока нет
- EE 6351 - Electrical Drives and Controls (EDC) QBДокумент160 страницEE 6351 - Electrical Drives and Controls (EDC) QBkannanchammyОценок пока нет
- Me 2205 Electrical Drives and Control: Unit I Introduction BY B.Durai Babu A.P/EeeДокумент27 страницMe 2205 Electrical Drives and Control: Unit I Introduction BY B.Durai Babu A.P/Eeerupi bhatiaОценок пока нет
- MMF of Air GapДокумент4 страницыMMF of Air GapRamesh BabuОценок пока нет
- Net Length of Iron (Unit-2 DC Machines)Документ3 страницыNet Length of Iron (Unit-2 DC Machines)Ramesh BabuОценок пока нет
- Introduction to Electric DrivesДокумент49 страницIntroduction to Electric DrivesRamesh BabuОценок пока нет
- Unit 1 Magnetic Circuit DesignДокумент11 страницUnit 1 Magnetic Circuit DesignRamesh BabuОценок пока нет
- 3 - EE8002 DEA Unit 5Документ21 страница3 - EE8002 DEA Unit 5Ramesh BabuОценок пока нет
- Induction MotorДокумент25 страницInduction MotorRamesh Babu0% (1)
- 1 - Ee8002 Dea Unit 5Документ32 страницы1 - Ee8002 Dea Unit 5Ramesh BabuОценок пока нет
- 1 - Ee8002 Dea Unit 5Документ32 страницы1 - Ee8002 Dea Unit 5Ramesh BabuОценок пока нет
- Unit 1 Ee2355 Machine DesignДокумент21 страницаUnit 1 Ee2355 Machine DesignRamesh BabuОценок пока нет
- PRES PPT2 Unit 1 Environment ImpactДокумент52 страницыPRES PPT2 Unit 1 Environment ImpactRamesh BabuОценок пока нет
- Synchronous Machine Output Equation & Main DimensionsДокумент21 страницаSynchronous Machine Output Equation & Main DimensionsRamesh BabuОценок пока нет
- Solar Electricity: Engineering of Photovoltaic Systems by E. Lorenzo, G. Araujo, A. Cuevas, M. Egido, J. Minano, R. ZillesДокумент7 страницSolar Electricity: Engineering of Photovoltaic Systems by E. Lorenzo, G. Araujo, A. Cuevas, M. Egido, J. Minano, R. ZillesRamesh Babu0% (1)
- Everything You Need to Know About LEDs (Light Emitting DiodesДокумент14 страницEverything You Need to Know About LEDs (Light Emitting DiodesRamesh BabuОценок пока нет
- Amorphous MetalДокумент2 страницыAmorphous MetalRamesh BabuОценок пока нет
- Eqckt IndmotorДокумент61 страницаEqckt IndmotorRamesh BabuОценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Electrical Technology - BakshiДокумент160 страницElectrical Technology - Bakshibhargavt170% (1)
- Peo MC DesignДокумент2 страницыPeo MC DesignRamesh BabuОценок пока нет
- Dimensions of Single & Three Phase TransformersДокумент1 страницаDimensions of Single & Three Phase TransformersRamesh BabuОценок пока нет
- Electrical Technology - BakshiДокумент160 страницElectrical Technology - Bakshibhargavt170% (1)
- DC Position ControlДокумент5 страницDC Position ControlRamesh Babu100% (2)
- AnnaДокумент2 страницыAnnaRamesh BabuОценок пока нет
- Conference BrochureДокумент4 страницыConference BrochureRamesh BabuОценок пока нет
- DC Motor ControlДокумент15 страницDC Motor ControlmalleswarararaoОценок пока нет
- Amorphous TransformerДокумент41 страницаAmorphous TransformerRamesh Babu0% (1)
- EE402 RecitationДокумент64 страницыEE402 Recitationvignesh0617Оценок пока нет
- Answers To Specific Heat ProblemsДокумент5 страницAnswers To Specific Heat ProblemsSiraj AL sharifОценок пока нет
- Three Moments of An Explosion 50 Page FridayДокумент44 страницыThree Moments of An Explosion 50 Page FridayRandom House Publishing GroupОценок пока нет
- Introduction to Structural AnalysisДокумент2 страницыIntroduction to Structural AnalysisMelvin EsguerraОценок пока нет
- Creep Behavior of Eutectic 80Au20Sn Solder Alloy PDFДокумент4 страницыCreep Behavior of Eutectic 80Au20Sn Solder Alloy PDFeid elsayedОценок пока нет
- SHM & Elasticity: Ba C BC A Ba CДокумент13 страницSHM & Elasticity: Ba C BC A Ba CKrithikaОценок пока нет
- Buat Camera Thermal DGN ArduinoДокумент4 страницыBuat Camera Thermal DGN ArduinoelkaОценок пока нет
- Sco-2120r Datasheet PDFДокумент2 страницыSco-2120r Datasheet PDFjdearОценок пока нет
- Chemistry Question Bank For 10th STDДокумент4 страницыChemistry Question Bank For 10th STDsameeraОценок пока нет
- The Inertial Lift On A Spherical Particle in A Plane Poiseuille Flow at Large Channel Reynolds NumberДокумент25 страницThe Inertial Lift On A Spherical Particle in A Plane Poiseuille Flow at Large Channel Reynolds Numberจักรพงศ์ กิ่วแก้วОценок пока нет
- Reflection of Light in MirrorsДокумент3 страницыReflection of Light in Mirrorsapi-31351760850% (2)
- 66kv Earthing System R-1 (For Print Out)Документ8 страниц66kv Earthing System R-1 (For Print Out)g_nraja100% (1)
- Suong V. Hoa - Design and Manufacturing of Composites-CRC Press (1998)Документ248 страницSuong V. Hoa - Design and Manufacturing of Composites-CRC Press (1998)joereisОценок пока нет
- Packer Calculations SecureДокумент230 страницPacker Calculations SecureEmre Cengiz100% (3)
- 2003, 94665723-New-energy-technologies-Issue-12 PDFДокумент81 страница2003, 94665723-New-energy-technologies-Issue-12 PDFJosefina SilveyraОценок пока нет
- Reliability Based DesignДокумент11 страницReliability Based DesigntohemaОценок пока нет
- Motor GeneratorsДокумент15 страницMotor GeneratorsAnonymous OuY6oAMggxОценок пока нет
- PreviewpdfДокумент63 страницыPreviewpdf20BM002 AKSHAYAОценок пока нет
- Pump Sizing Calculation Step-by-StepДокумент3 страницыPump Sizing Calculation Step-by-StepBegenkzОценок пока нет
- Lesson2 1-LightДокумент4 страницыLesson2 1-LightGrace06 LabinОценок пока нет
- SIG4038 Reservoir Recovery Techniques 2000 - PVT and Material Balance EquationsДокумент4 страницыSIG4038 Reservoir Recovery Techniques 2000 - PVT and Material Balance EquationsAlbertlb AB100% (1)
- UT Book ArticlesДокумент135 страницUT Book ArticlesAnonymous uXdS9Y7100% (1)
- Drop Test Ansys Vs DynaДокумент20 страницDrop Test Ansys Vs Dynamanmohan_iitОценок пока нет
- Trenching Soil TypesДокумент1 страницаTrenching Soil TypesJerome MansuetoОценок пока нет
- 0521138175Документ191 страница0521138175Mohamed Arbi Ben Younes100% (4)
- Laboratory Manual Course Code Ece254 Course Title: Unified Electronics Laboratory-IДокумент67 страницLaboratory Manual Course Code Ece254 Course Title: Unified Electronics Laboratory-IKaran SainiОценок пока нет
- Specific Gravity PDFДокумент6 страницSpecific Gravity PDFAlaaОценок пока нет
- SupportVectorMachine NotesДокумент131 страницаSupportVectorMachine Notesjangli hathiОценок пока нет
- LCDworkbook PDFДокумент102 страницыLCDworkbook PDFkachappilly2012Оценок пока нет
- Tips and Tricks HPLC TroubleshootingДокумент7 страницTips and Tricks HPLC TroubleshootingFelipe MonteroОценок пока нет
- 5 Longitudinal and Transverse VibrationsДокумент4 страницы5 Longitudinal and Transverse Vibrationsenggsantu0% (1)