Вам также может понравиться
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalОт EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalРейтинг: 5 из 5 звезд5/5 (4)
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorОт EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorОценок пока нет
- Práctica 1Документ9 страницPráctica 1German Mera100% (1)
- Informe Brazo RobóticoДокумент18 страницInforme Brazo RobóticoRyan Hudson100% (2)
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208От EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Оценок пока нет
- Operaciones auxiliares de servicios de la aeronave. TMVO0109От EverandOperaciones auxiliares de servicios de la aeronave. TMVO0109Оценок пока нет
- Check List Arranque VRV-NOUCLIMA-LA AMADAДокумент12 страницCheck List Arranque VRV-NOUCLIMA-LA AMADAAlejandro Pelcastre100% (1)
- Informe Brazo RoboticoДокумент12 страницInforme Brazo Roboticosantiago100% (1)
- Consola AltamiraДокумент22 страницыConsola AltamiraReynold Suarez100% (2)
- Investigacion RoboticaДокумент9 страницInvestigacion Roboticajjovany89Оценок пока нет
- Presentacion Cosimir Festo (Español)Документ87 страницPresentacion Cosimir Festo (Español)Rafael Perez Meza100% (1)
- Informe Brazo RoboticoДокумент27 страницInforme Brazo RoboticoArthur Morales Dionicio0% (1)
- Robots AntropomorficosДокумент5 страницRobots AntropomorficosbobguvОценок пока нет
- Robotica Industrial 1 2014Документ57 страницRobotica Industrial 1 2014Braulio ValdesОценок пока нет
- Robotica Con MatlabДокумент17 страницRobotica Con MatlabJE JosephОценок пока нет
- Robot cartesiano TESEДокумент28 страницRobot cartesiano TESEAntonio MartinezОценок пока нет
- El ABC de La Tarea DocenteДокумент10 страницEl ABC de La Tarea DocenteIara BraunОценок пока нет
- Fase 2 Trabajo ColaborativoДокумент28 страницFase 2 Trabajo Colaborativocesar sanchezОценок пока нет
- Práctica No.1 - Características KUKAДокумент10 страницPráctica No.1 - Características KUKAEmiliano Albán NaranjoОценок пока нет
- Guía de Laboratorio Del Brazo Robot Scorbot ER 4uДокумент10 страницGuía de Laboratorio Del Brazo Robot Scorbot ER 4uOscar VillaОценок пока нет
- (438176019) Guía de Laboratorio Del Brazo Robot Scorbot ER 4u.unlockedДокумент8 страниц(438176019) Guía de Laboratorio Del Brazo Robot Scorbot ER 4u.unlockedMThe StrokesОценок пока нет
- Guía Laboratorio Brazo Robot ScorbotДокумент8 страницGuía Laboratorio Brazo Robot ScorbotChRiss CarvajalОценок пока нет
- Práctica de RobóticaДокумент12 страницPráctica de RobóticaBryan RobayoОценок пока нет
- Programación brazo robótico Scorbot-ER 4u ordenar vasos nivel llenadoДокумент3 страницыProgramación brazo robótico Scorbot-ER 4u ordenar vasos nivel llenadoRoger Salomon QuispeОценок пока нет
- Mecanismos en Robots y Robots Aplicados en La Industria EcuatorianaДокумент7 страницMecanismos en Robots y Robots Aplicados en La Industria EcuatorianaFranklin Veintimilla CalvopiñaОценок пока нет
- Informe N°1 RoboticaДокумент15 страницInforme N°1 RoboticaEduardo QuistanОценок пока нет
- Avance Punto 2 - Miguel YelaДокумент17 страницAvance Punto 2 - Miguel YelaKevin Stiven Ceballos TorresОценок пока нет
- Paper Balancin658Документ12 страницPaper Balancin658Henry PilamalaОценок пока нет
- ROBOTICAДокумент37 страницROBOTICAraziel sanchezОценок пока нет
- Vision General RoboticaДокумент45 страницVision General Roboticadeyvi_is1064Оценок пока нет
- Informe Inextenso SCARAДокумент12 страницInforme Inextenso SCARAWilber Marcelo Apaz ArancibiaОценок пока нет
- Lab Nº1 - Morfología Del Robot - 2013-IДокумент11 страницLab Nº1 - Morfología Del Robot - 2013-IMauricio LewisОценок пока нет
- Generación de trayectorias en simulación de dos manipuladoresДокумент8 страницGeneración de trayectorias en simulación de dos manipuladoresCristian Andres MartinezОценок пока нет
- Paper Balancin658Документ12 страницPaper Balancin658Esteban GutiérrezОценок пока нет
- Fase2 Grupo 299011 4Документ12 страницFase2 Grupo 299011 4Luis Alcides SantanaОценок пока нет
- Título Del Proyecto de RoboticaДокумент15 страницTítulo Del Proyecto de RoboticaYilmer Locutor DjyilmerОценок пока нет
- Aportes Camilo PaipillaДокумент9 страницAportes Camilo PaipillaMiguel Angel Mendigaño ArismendyОценок пока нет
- Análisis de parámetros de robots industrialesДокумент8 страницAnálisis de parámetros de robots industrialesRicardo UribeОценок пока нет
- Informe Robotica MecatronicaДокумент21 страницаInforme Robotica MecatronicaWilfredo OlazabalОценок пока нет
- 1.7 Tipos y Caracteristicas de RobotsДокумент4 страницы1.7 Tipos y Caracteristicas de RobotsRocha113Оценок пока нет
- Material Robotica 2019s1Документ7 страницMaterial Robotica 2019s1Maximiano LopezОценок пока нет
- T4 RobotДокумент97 страницT4 RobotMir Lóp ThorОценок пока нет
- Fase 02 Grupo 34Документ18 страницFase 02 Grupo 34kagonzalez95Оценок пока нет
- Unidad 1 Morfologia Del RobotДокумент51 страницаUnidad 1 Morfologia Del RobotIsrael MartinОценок пока нет
- Robotica Practica 2Документ3 страницыRobotica Practica 2Carlos GonzalezОценок пока нет
- Proyecto Robotica FinalДокумент19 страницProyecto Robotica FinalJose Cadima TronОценок пока нет
- Prototipo de Robot Scara Con Base MovilДокумент11 страницPrototipo de Robot Scara Con Base MovilBourchech OuОценок пока нет
- Laboratorio Robotica Klein Molinares y JuancarlosДокумент4 страницыLaboratorio Robotica Klein Molinares y JuancarlosKlein MolinaresОценок пока нет
- Lab 2. Grados de LibertadДокумент3 страницыLab 2. Grados de LibertadJosh Trial100% (1)
- Fase2 OscarSantosДокумент16 страницFase2 OscarSantosfranklin martinezОценок пока нет
- Fase2 OscarSantosДокумент8 страницFase2 OscarSantosfranklin martinezОценок пока нет
- Clasificación de Robot FANUC Y MITSUBISHIДокумент21 страницаClasificación de Robot FANUC Y MITSUBISHIJulio Gonzales Guevara100% (2)
- Robotica Unidad 1 RecuperacionДокумент19 страницRobotica Unidad 1 RecuperacionJorge Fabian GualteroОценок пока нет
- Fase2 G22Документ65 страницFase2 G22jhonatan insuastyОценок пока нет
- Robotica Industrial - Informe de LaboratorioДокумент11 страницRobotica Industrial - Informe de LaboratorioLuis NuelaОценок пока нет
- Origenes y Desarrollo de La RoboticaДокумент23 страницыOrigenes y Desarrollo de La RoboticaMadianita EstradaОценок пока нет
- Tema 1.2 Estructura Mecánica de Un RobotДокумент10 страницTema 1.2 Estructura Mecánica de Un RobotYami CortezОценок пока нет
- 2 Robotica Industrial Definicion Caracteristicas AplicacionesДокумент22 страницы2 Robotica Industrial Definicion Caracteristicas AplicacionesDemetrio Hinojosa EОценок пока нет
- KUKA Primer InformeДокумент47 страницKUKA Primer InformeAlexis VladimirОценок пока нет
- Capitulo 2Документ17 страницCapitulo 2Félix MosquedaОценок пока нет
- Brazo Robótico ReporteДокумент22 страницыBrazo Robótico ReporteJezzi GLОценок пока нет
- ROBÓTICA-LAB1Документ7 страницROBÓTICA-LAB1Carlos CaceresОценок пока нет
- Analisis de Un Circuito Integrado VCA PDFДокумент4 страницыAnalisis de Un Circuito Integrado VCA PDFYerko LucoОценок пока нет
- AsdasdДокумент37 страницAsdasdYerko LucoОценок пока нет
- 8.-Aplicaciones: Fig. 16. - Condensador de Arranque de Un Compresor FrigoríficoДокумент2 страницы8.-Aplicaciones: Fig. 16. - Condensador de Arranque de Un Compresor FrigoríficocifpmspОценок пока нет
- Analisis de CircuitosДокумент39 страницAnalisis de CircuitosazulxkОценок пока нет
- Ampolificador Emisor ComunДокумент8 страницAmpolificador Emisor ComunRoberto CaizaОценок пока нет
- Avcapitulo VIIДокумент23 страницыAvcapitulo VIIGuerra CalderónОценок пока нет
- Dispositivos ElectronicosДокумент0 страницDispositivos Electronicospeloymon_77Оценок пока нет
- Leccion SnubbersДокумент66 страницLeccion Snubbersbenaaioros100% (1)
- 7 Funcion de Transferencia Primer OrdenДокумент13 страниц7 Funcion de Transferencia Primer OrdenAna MelendezОценок пока нет
- Metodosde Fracciones ParcialesДокумент43 страницыMetodosde Fracciones ParcialesErik JuarezОценок пока нет
- Intro VisualДокумент34 страницыIntro VisualYerko LucoОценок пока нет
- Georreferenciacion Viviendas AisladasДокумент17 страницGeorreferenciacion Viviendas AisladasFISICORAN ING.CIVILОценок пока нет
- Cap. 12 - Evaluar, Definir, Implantar, Mantener Javier Morales 1674178Документ7 страницCap. 12 - Evaluar, Definir, Implantar, Mantener Javier Morales 1674178Alma TorresОценок пока нет
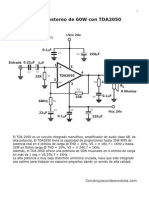
- Amplificador 60w Con Tda2050Документ8 страницAmplificador 60w Con Tda2050david100% (1)
- MECAF: Un Nuevo Paradigma para La Formalización de La Administración EmpresarialДокумент3 страницыMECAF: Un Nuevo Paradigma para La Formalización de La Administración EmpresarialGrupo Calipso SAОценок пока нет
- Guión Elevador PitchДокумент2 страницыGuión Elevador PitchJosé CuevasОценок пока нет
- Simulación de ProcesosДокумент15 страницSimulación de ProcesosPeter T. G. I. LarterОценок пока нет
- Análisis estratégico de Colchones y Muebles Relax S.AДокумент37 страницAnálisis estratégico de Colchones y Muebles Relax S.AWENDY RAMIREZОценок пока нет
- Ramirez y Paiva Desarrollo de Talento HumanoДокумент17 страницRamirez y Paiva Desarrollo de Talento HumanoeapinedoОценок пока нет
- Untitled PDFДокумент72 страницыUntitled PDFCarlos RiveraОценок пока нет
- Actividad Individual - Marcadores Discursivos - Laleska Llanos - EPIAMДокумент11 страницActividad Individual - Marcadores Discursivos - Laleska Llanos - EPIAMLaleska LlanosОценок пока нет
- T ESISДокумент184 страницыT ESISDavid Luyz0% (1)
- El Rol de La Logistica en El Comercio Internacional:: Ing. Juan R. Opertti (MBA)Документ23 страницыEl Rol de La Logistica en El Comercio Internacional:: Ing. Juan R. Opertti (MBA)SAMANTHA HERNANDEZ CAZADEROОценок пока нет
- Guia Nº2Документ4 страницыGuia Nº2Marcos TiconaОценок пока нет
- Guia Manejo Software CrocodileДокумент3 страницыGuia Manejo Software CrocodileQuevin BarreraОценок пока нет
- Técnicas de DiversidadДокумент3 страницыTécnicas de DiversidadDiego SanchezОценок пока нет
- Hernan Osorio - Segundo Trabajo de Gestion ComercialДокумент7 страницHernan Osorio - Segundo Trabajo de Gestion ComercialHERNAN URIES JUNIOR OSORIO ROMEROОценок пока нет
- Pedagogía TransformativaДокумент4 страницыPedagogía TransformativaLeiryОценок пока нет
- Humanidades V Humanismo y Globalizacion PresentacionДокумент2 страницыHumanidades V Humanismo y Globalizacion PresentacionJorge JuanОценок пока нет
- Proyecto ISP Wireless: guía completa para iniciar un proveedor de servicios inalámbricoДокумент24 страницыProyecto ISP Wireless: guía completa para iniciar un proveedor de servicios inalámbricoMario JaraОценок пока нет
- Gecifc3012 PDFДокумент46 страницGecifc3012 PDFKevin TorresОценок пока нет
- Interoperabilidad SintácticaДокумент2 страницыInteroperabilidad SintácticajennifermolinОценок пока нет
- Monitoreo de Los Empleados en Las RedesДокумент3 страницыMonitoreo de Los Empleados en Las RedesAlejandro Francisco EstrellaОценок пока нет
- Transfomadores SecosДокумент1 страницаTransfomadores SecosJose Luis Moreno RodriguezОценок пока нет
- Especificación Revest. Ria. Monte AdentroДокумент15 страницEspecificación Revest. Ria. Monte AdentroAntonioОценок пока нет
- Angeles SMA SDДокумент146 страницAngeles SMA SDVictor Felipe Domínguez MaloОценок пока нет
- ArcCatalogoДокумент11 страницArcCatalogoMoisesОценок пока нет
- SubtitleДокумент5 страницSubtitleadrОценок пока нет