Вам также может понравиться
- Silo Cement CalculationДокумент11 страницSilo Cement CalculationFikriaraz AfifОценок пока нет
- Zarlino-On The ModesДокумент150 страницZarlino-On The ModesPartituraDireccion100% (1)
- PSCAD Course NotesДокумент72 страницыPSCAD Course NotesPacha Mami100% (1)
- PSCAD Course NotesДокумент72 страницыPSCAD Course NotesPacha Mami100% (1)
- Dynamic model of manipulatorsДокумент20 страницDynamic model of manipulatorsbalkyderОценок пока нет
- Electrical Overstress (EOS): Devices, Circuits and SystemsОт EverandElectrical Overstress (EOS): Devices, Circuits and SystemsОценок пока нет
- Lightning Performance of Compact Transmission LinesДокумент21 страницаLightning Performance of Compact Transmission LinesJuanjo Gonzales PerezОценок пока нет
- The Order of Historical Time: The Longue Durée and Micro-HistoryДокумент17 страницThe Order of Historical Time: The Longue Durée and Micro-HistoryGeorgia KoutaОценок пока нет
- Carson 26 Wave Propagation in Overhead Wires PDFДокумент16 страницCarson 26 Wave Propagation in Overhead Wires PDFjcsanchОценок пока нет
- LS EHV Cable System: 66 500kV XLPE Cable & AccessoriesДокумент64 страницыLS EHV Cable System: 66 500kV XLPE Cable & AccessoriesRachid HamianiОценок пока нет
- Maxwell's Equations and Stoke's TheoremДокумент26 страницMaxwell's Equations and Stoke's TheoremTuya ErdenejargalОценок пока нет
- Control PhilosophyДокумент2 страницыControl PhilosophytsplinstОценок пока нет
- Cross-Bonding Cable and Box Model Based On Pulse Reflection MeasurementДокумент8 страницCross-Bonding Cable and Box Model Based On Pulse Reflection Measurementdes1982Оценок пока нет
- Comparison On Wind Load Prediction of Transmission PDFДокумент8 страницComparison On Wind Load Prediction of Transmission PDFtahaelnourОценок пока нет
- Electric Field and Voltage Distribution Along Non-Ceramic Insulators PDFДокумент16 страницElectric Field and Voltage Distribution Along Non-Ceramic Insulators PDFostojic007Оценок пока нет
- Transmission Line Modeling of Grounding Electrodes and Calculation of Their Effective Length Under Impulse ExcitationДокумент6 страницTransmission Line Modeling of Grounding Electrodes and Calculation of Their Effective Length Under Impulse ExcitationLaila JanОценок пока нет
- Digital Computer Solution of Electromagnetic Transients in Single and Multiple NetworksДокумент12 страницDigital Computer Solution of Electromagnetic Transients in Single and Multiple Networks曾乙申100% (1)
- Numerical Simulation of Electric Fields in Underground Power CablesДокумент6 страницNumerical Simulation of Electric Fields in Underground Power CablesMagdi SaadawiОценок пока нет
- Filipe Miguel Faria Da SilvaДокумент263 страницыFilipe Miguel Faria Da SilvaroyclhorОценок пока нет
- RwSubmarine Cables - 1920T2 - PE4 5EEBДокумент10 страницRwSubmarine Cables - 1920T2 - PE4 5EEBJancis VBОценок пока нет
- Impulse Current Testing According IECДокумент7 страницImpulse Current Testing According IECscribdquy100% (2)
- 11ipst014 PDFДокумент6 страниц11ipst014 PDFhanryОценок пока нет
- Optical and Microwave Technologies for Telecommunication NetworksОт EverandOptical and Microwave Technologies for Telecommunication NetworksОценок пока нет
- Cable Modelling in ATPДокумент13 страницCable Modelling in ATPswarnankur_ghoshОценок пока нет
- Grading of InsulatorДокумент38 страницGrading of InsulatormunisekharОценок пока нет
- Benefits of Silicone Coated Glass InsulatorsДокумент10 страницBenefits of Silicone Coated Glass InsulatorsMuhammad Waseem AhmadОценок пока нет
- 022 TT Short-Circuit PDFДокумент4 страницы022 TT Short-Circuit PDFwwe_himanshuОценок пока нет
- Simulation of Transients in Unerground Cables With Frequency Dependent ModalДокумент12 страницSimulation of Transients in Unerground Cables With Frequency Dependent ModalMadhusudhan Srinivasan100% (1)
- Improved Overhead Line Conductors Using Aluminium Alloy 1120 - K.W. Barber - 1995Документ7 страницImproved Overhead Line Conductors Using Aluminium Alloy 1120 - K.W. Barber - 1995Oscar OrdazОценок пока нет
- EMTP Reference Models For Transmission Line RelaysДокумент61 страницаEMTP Reference Models For Transmission Line RelaysAravind SampathОценок пока нет
- Digital Computation of Electromagnetic Transients in Power Ssytems - Current StatusДокумент19 страницDigital Computation of Electromagnetic Transients in Power Ssytems - Current Statusj_j_dai100% (1)
- Application of Matrix Methods To The Solution of Travelling-Wave Phenomena in Polyphase SystemsДокумент13 страницApplication of Matrix Methods To The Solution of Travelling-Wave Phenomena in Polyphase SystemsKunal RajaОценок пока нет
- Calculation of Earthing and Screening EffectsДокумент10 страницCalculation of Earthing and Screening EffectsVictor AgueroОценок пока нет
- Direct Frequency Domain Computation of Transmission Line Transients Due To Switching OperationsДокумент7 страницDirect Frequency Domain Computation of Transmission Line Transients Due To Switching OperationsdanluscribОценок пока нет
- Ametani1994 PDFДокумент7 страницAmetani1994 PDFBorislav BrnjadaОценок пока нет
- Effects of Environmental Conditions on Shielding Failure RatesДокумент9 страницEffects of Environmental Conditions on Shielding Failure RatesAbraham MaravíОценок пока нет
- Admittance-Based Modeling of Transmission Lines by A Folded Line EquivalentДокумент9 страницAdmittance-Based Modeling of Transmission Lines by A Folded Line EquivalentAsesoría CognizulОценок пока нет
- Composite InsulatorsДокумент7 страницComposite InsulatorsTakisОценок пока нет
- 33 - 401 - 2002 - Dimensionamento de Isoladores para Poluição Salina. Um Novo Procedimento e Um Método de Teste de LaboratórioДокумент9 страниц33 - 401 - 2002 - Dimensionamento de Isoladores para Poluição Salina. Um Novo Procedimento e Um Método de Teste de LaboratórioSergio SachtОценок пока нет
- Calibration Scope K006 - KEMAДокумент7 страницCalibration Scope K006 - KEMAelvart007458Оценок пока нет
- External Insulation Design of XS800 ±800 kV UHVDC ProjectДокумент7 страницExternal Insulation Design of XS800 ±800 kV UHVDC ProjectNunna BaskarОценок пока нет
- Wave Propagation in Overhead Wires With Ground Return - John R. CarsonДокумент16 страницWave Propagation in Overhead Wires With Ground Return - John R. CarsonfandiОценок пока нет
- Analysis of Insulator Strings For 69 KV and 115 KVДокумент6 страницAnalysis of Insulator Strings For 69 KV and 115 KVveynaldiОценок пока нет
- Jicable11 - Armouring Loss in Three-Core Submarine XLPE CablesДокумент5 страницJicable11 - Armouring Loss in Three-Core Submarine XLPE CablesnjmcrawfordОценок пока нет
- Line Design Based Upon Direct StrokesДокумент32 страницыLine Design Based Upon Direct StrokesbasilecoqОценок пока нет
- PDE TOLL MatlabДокумент6 страницPDE TOLL MatlabNiko Garcia MeythalerОценок пока нет
- Cigre Toronto 2009 PDFДокумент13 страницCigre Toronto 2009 PDFpeloduro1010Оценок пока нет
- Experience With Non-Ceramic Insulators On Transmission Lines in Australia (Part 1 of 2) - INMR PDFДокумент12 страницExperience With Non-Ceramic Insulators On Transmission Lines in Australia (Part 1 of 2) - INMR PDFVitalyОценок пока нет
- Diagnostic Methods For Outdoor Polymeric InsulatorsДокумент16 страницDiagnostic Methods For Outdoor Polymeric InsulatorsluqmansulymanОценок пока нет
- Seminar Report On Composite InsulatorsДокумент12 страницSeminar Report On Composite InsulatorsArti Mittal33% (3)
- 1933 IEEE Journals Traveling-Wave Voltages in CablesДокумент7 страниц1933 IEEE Journals Traveling-Wave Voltages in CablesiaessackjeeОценок пока нет
- Rating of Cables On Riser Poles, in Trays, in Tunnels and Shafts-A Review PDFДокумент9 страницRating of Cables On Riser Poles, in Trays, in Tunnels and Shafts-A Review PDFStefanos DiamantisОценок пока нет
- Emf GroundДокумент11 страницEmf Groundf2009067Оценок пока нет
- Automated Recognition of Partial DischargesДокумент26 страницAutomated Recognition of Partial DischargesDaniel Rafael DzuculeОценок пока нет
- Numerical Study On Dynamic Swing of Insulator String in Tower-Line System Under Wind LoadДокумент4 страницыNumerical Study On Dynamic Swing of Insulator String in Tower-Line System Under Wind LoadDavid Matatan PérezОценок пока нет
- Dielectric Response Power Cable SystemДокумент24 страницыDielectric Response Power Cable SystemRktBatamОценок пока нет
- Impulse Current Test SystemsДокумент3 страницыImpulse Current Test SystemsDavid Ade SОценок пока нет
- Implementation of The Numerical Laplace Transform: A ReviewДокумент11 страницImplementation of The Numerical Laplace Transform: A ReviewSharad PatelОценок пока нет
- Composite Insulation For Reliability Centered Design of Compact HVAC & HVDCДокумент6 страницComposite Insulation For Reliability Centered Design of Compact HVAC & HVDCshlee1977Оценок пока нет
- Insulator Shed ProfileДокумент4 страницыInsulator Shed Profilebharat_ravulapalliОценок пока нет
- ZNC Varistor Switching SurgeДокумент39 страницZNC Varistor Switching Surgeth3g4m3Оценок пока нет
- Neutral to Earth Voltage Analysis in Harmonic Polluted Distribution NetworksДокумент5 страницNeutral to Earth Voltage Analysis in Harmonic Polluted Distribution NetworksGervasio SimaoОценок пока нет
- Power Transmission Over Long Distances With CablesДокумент8 страницPower Transmission Over Long Distances With CablesramsesiОценок пока нет
- ATP ManualДокумент270 страницATP ManualJose Jorge Fontalvo100% (1)
- Center of InertiaДокумент6 страницCenter of InertiaPacha MamiОценок пока нет
- Ieee Pes FinalДокумент9 страницIeee Pes FinallanoportoОценок пока нет
- Prony MethodДокумент8 страницProny MethodPacha MamiОценок пока нет
- Model Identification For Spinning Reserve Management UsingДокумент5 страницModel Identification For Spinning Reserve Management UsingPacha MamiОценок пока нет
- Modeling and Analysis of Double Fed InductionДокумент6 страницModeling and Analysis of Double Fed InductionPacha MamiОценок пока нет
- Modeling of The Wind Turbine With A Doubly FedДокумент8 страницModeling of The Wind Turbine With A Doubly FedPacha MamiОценок пока нет
- W. Sauer. Dynamic Modeling of Doubly Fed InductionДокумент6 страницW. Sauer. Dynamic Modeling of Doubly Fed InductionPacha MamiОценок пока нет
- 01198317Документ7 страниц01198317Arslan KhalidОценок пока нет
- Dynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-GeneratorsДокумент7 страницDynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-GeneratorsPacha MamiОценок пока нет
- Dynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-GeneratorsДокумент7 страницDynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-GeneratorsPacha MamiОценок пока нет
- Frequency Estimation PrintДокумент10 страницFrequency Estimation PrintPacha MamiОценок пока нет
- Modelling and Analysis of Dfig Wind TurbineДокумент6 страницModelling and Analysis of Dfig Wind TurbinePacha MamiОценок пока нет
- Camshaft Test SheetДокумент4 страницыCamshaft Test SheetsughieantoОценок пока нет
- Austenitic Stainless SteelsДокумент10 страницAustenitic Stainless SteelsbramОценок пока нет
- PEE3-M Lec 1Документ19 страницPEE3-M Lec 1Ena Leanica DelgadoОценок пока нет
- Epoxy Hardeners, Water-Reducible: ProductsДокумент1 страницаEpoxy Hardeners, Water-Reducible: ProductsDhruv SevakОценок пока нет
- DasibiOzoneMonitorManual 1008Документ183 страницыDasibiOzoneMonitorManual 1008api-26966403100% (2)
- Unit 10Документ18 страницUnit 10ChaithraMalluОценок пока нет
- ENGG1330 2N Computer Programming I (20-21 Semester 2) Assignment 1Документ5 страницENGG1330 2N Computer Programming I (20-21 Semester 2) Assignment 1Fizza JafferyОценок пока нет
- Steam Drive Correlation and Prediction PDFДокумент10 страницSteam Drive Correlation and Prediction PDFEmre CengizОценок пока нет
- HER107 DatasheetДокумент4 страницыHER107 DatasheetPeter Yvan Ramos PeñaОценок пока нет
- Pragathi Full Test-6, Paper-2 (Qp+Key) - 18.07.22Документ14 страницPragathi Full Test-6, Paper-2 (Qp+Key) - 18.07.22Ganesan MuthukrishnanОценок пока нет
- The Professional DesktopДокумент318 страницThe Professional Desktopalintuta2Оценок пока нет
- Time TableДокумент7 страницTime TableChethan .H.GОценок пока нет
- Employee performance factors analysis electronic companyДокумент10 страницEmployee performance factors analysis electronic companyAmrithaОценок пока нет
- Jaguar Land Rover Configuration Lifecycle Management WebДокумент4 страницыJaguar Land Rover Configuration Lifecycle Management WebStar Nair Rock0% (1)
- Sensors 22 09378 v2Документ13 страницSensors 22 09378 v2FahdОценок пока нет
- VLSI Design: Introduction & Motivation Introduction & MotivationДокумент33 страницыVLSI Design: Introduction & Motivation Introduction & MotivationPriyanka SharmaОценок пока нет
- USB GPW CB03 MT02 - EngДокумент21 страницаUSB GPW CB03 MT02 - EngRafael BispoОценок пока нет
- GAS-INSULATED SWITCHGEAR MODELS 72kV ADVANCED ENVIRONMENTALLY FRIENDLYДокумент6 страницGAS-INSULATED SWITCHGEAR MODELS 72kV ADVANCED ENVIRONMENTALLY FRIENDLYBudi SantonyОценок пока нет
- Massive MIMO For Communications With Drone SwarmsДокумент26 страницMassive MIMO For Communications With Drone SwarmsAsher Suranjith JayakumarОценок пока нет
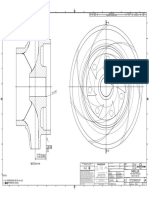
- Impeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLДокумент1 страницаImpeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLSenthilkumar RamalingamОценок пока нет
- h6541 Drive Sparing Symmetrix Vmax WPДокумент19 страницh6541 Drive Sparing Symmetrix Vmax WPsantoshОценок пока нет
- NewsДокумент26 страницNewsMaria Jose Soliz OportoОценок пока нет
- Reliability EngineeringДокумент9 страницReliability Engineeringnvaradharajan1971Оценок пока нет
- EET422 EMC Intro-Banana Skins 2011-2012 MSWДокумент6 страницEET422 EMC Intro-Banana Skins 2011-2012 MSWVeeradasan PerumalОценок пока нет
- Sequelize GuideДокумент5 страницSequelize Guidemathur1995Оценок пока нет