Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Fire Risk Assessment ChecklistДокумент10 страницFire Risk Assessment Checklistm. absiyeОценок пока нет
- MS150093 01e PDFДокумент181 страницаMS150093 01e PDFAntonio MartinОценок пока нет
- The Business Analyst and The SDLCДокумент8 страницThe Business Analyst and The SDLCErlet ShaqeОценок пока нет
- IT418 - C# Programming Project: Lottery Number GeneratorДокумент41 страницаIT418 - C# Programming Project: Lottery Number GeneratorCarmenLim07100% (5)
- MBAM Deployment GuideДокумент80 страницMBAM Deployment GuidePsam Umasankar0% (1)
- ICBC Motorcycle Handbook (British Columbia)Документ212 страницICBC Motorcycle Handbook (British Columbia)BОценок пока нет
- Operation & Maintenance Manual d260 S3a-En Okt. 2014Документ166 страницOperation & Maintenance Manual d260 S3a-En Okt. 2014DrBollapu Sudarshan50% (2)
- Shivali Singh-Paper On EnglishДокумент9 страницShivali Singh-Paper On Englishabhi-15sepОценок пока нет
- Satellite Comms Link BudgetДокумент5 страницSatellite Comms Link BudgetZakky 'Trixy' BaidhowyОценок пока нет
- Restoration Version 2.5.14 5/14/2002 (Description) Restore Files WhichДокумент4 страницыRestoration Version 2.5.14 5/14/2002 (Description) Restore Files Whichparadise711Оценок пока нет
- DigitalCommMS PDFДокумент2 страницыDigitalCommMS PDFMuhammad AzamОценок пока нет
- Doctrine Cheat SheetДокумент1 страницаDoctrine Cheat Sheetfreebolik86% (7)
- Liquid Distribution and Falling Film Wetting in Dairy EvaporatorsДокумент227 страницLiquid Distribution and Falling Film Wetting in Dairy Evaporatorsyadavmihir63Оценок пока нет
- As 3638-1993 Test Sieving ProceduresДокумент7 страницAs 3638-1993 Test Sieving ProceduresSAI Global - APACОценок пока нет
- Modes in Optical FibersДокумент10 страницModes in Optical FibersAdamStone100% (1)
- sw70x1 Service ManualДокумент35 страницsw70x1 Service ManualGitmel GutierrezОценок пока нет
- Kstar Inverosores DatasheetДокумент1 страницаKstar Inverosores DatasheetJosueLopesFariasОценок пока нет
- FDP ECE BrochureДокумент3 страницыFDP ECE BrochureBalasanthosh SountharajanОценок пока нет
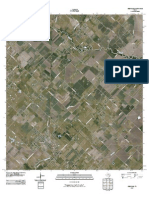
- Topographic Map of NeedvilleДокумент1 страницаTopographic Map of NeedvilleHistoricalMapsОценок пока нет
- Final Report FEQ PDFДокумент69 страницFinal Report FEQ PDFNabeel A K JadoonОценок пока нет
- Clearvista UrgentДокумент2 страницыClearvista UrgentkevinОценок пока нет
- IT Audit Exercise 2Документ1 страницаIT Audit Exercise 2wirdinaОценок пока нет
- English Core 2005Документ5 страницEnglish Core 2005thiripura sundariОценок пока нет
- Product Data: 58GP, GS Upflow Natural-Draft Gas-Fired FurnaceДокумент8 страницProduct Data: 58GP, GS Upflow Natural-Draft Gas-Fired FurnaceMichael MartinОценок пока нет
- DIAGRAMA - 2007 - NEW YarisДокумент1 страницаDIAGRAMA - 2007 - NEW YarisLuis M. Valenzuela Arias50% (2)
- (Sears) DeluxeDemandWaterSoftenersownersmanualsДокумент32 страницы(Sears) DeluxeDemandWaterSoftenersownersmanualsGreg Reyneke100% (1)
- Skills, Techniques and Production in Contemporary Art HANDOUT PDFДокумент4 страницыSkills, Techniques and Production in Contemporary Art HANDOUT PDFKeyy TaezaОценок пока нет
- The Diffusion of Innovation and Adopter CategoriesДокумент3 страницыThe Diffusion of Innovation and Adopter CategoriesMark Angelo TitcoОценок пока нет
- Buku Program Kopo 18Документ20 страницBuku Program Kopo 18Mieza Binti YusoffОценок пока нет
- 78-00583 Profo Metpoint Ocv Compact 8p Int DisplayДокумент8 страниц78-00583 Profo Metpoint Ocv Compact 8p Int DisplayLinh NgoОценок пока нет
- Saniaccess Pump Product SheetДокумент1 страницаSaniaccess Pump Product SheetArun UdayabhanuОценок пока нет
- Machxo2™ Family Data Sheet: Ds1035 Version 3.3, March 2017Документ116 страницMachxo2™ Family Data Sheet: Ds1035 Version 3.3, March 2017Haider MalikОценок пока нет
- K13 High-Flex Waterproofing SlurryДокумент3 страницыK13 High-Flex Waterproofing SlurryAmila SampathОценок пока нет
- DPC6HG Aa00 G0000 ZS001 - 001 - 01Документ6 страницDPC6HG Aa00 G0000 ZS001 - 001 - 01rajitkumar.3005Оценок пока нет