Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Exadata Database Machine Platform Monitoring: IntroductionДокумент13 страницExadata Database Machine Platform Monitoring: Introductionpraveen2kumar5733Оценок пока нет
- Computer Form 1 NotesДокумент55 страницComputer Form 1 NotesMohammed B.S. Makimu100% (1)
- ReadMeQPST Version 2.7 10 October 2013 This readme covers important information concerning QPST 2.7. Table of Contents 1. Installation notes 2. Known issues 3. Additional software notices 4. Release notes ---------------------------------------------------------------------- 1. INSTALLATION NOTES Install by running setup.exe, NOT the msi file. Setup.exe will resolve run-time library dependencies and then run the msi file for you. When installing QPST, the installing user may need administration privileges. QPST no longer installs or runs on Win95, Win98, WinNT, or Win2K. You MUST use the QUALCOMM USB device driver or a QPST compatible device driver on your PC if you wish to use QPST with a USB port. When used with QPST, other drivers can cause your PC to hang when you reset or disconnect the mobile. You will have to restart your PC to recover. Or you may find that the phone disappears from the QPST configuration when it resets, and not reappear until you restart QPST. -------Документ39 страницReadMeQPST Version 2.7 10 October 2013 This readme covers important information concerning QPST 2.7. Table of Contents 1. Installation notes 2. Known issues 3. Additional software notices 4. Release notes ---------------------------------------------------------------------- 1. INSTALLATION NOTES Install by running setup.exe, NOT the msi file. Setup.exe will resolve run-time library dependencies and then run the msi file for you. When installing QPST, the installing user may need administration privileges. QPST no longer installs or runs on Win95, Win98, WinNT, or Win2K. You MUST use the QUALCOMM USB device driver or a QPST compatible device driver on your PC if you wish to use QPST with a USB port. When used with QPST, other drivers can cause your PC to hang when you reset or disconnect the mobile. You will have to restart your PC to recover. Or you may find that the phone disappears from the QPST configuration when it resets, and not reappear until you restart QPST. -------Unknwn ShdowОценок пока нет
- Time Server Correction ParametersДокумент11 страницTime Server Correction ParametersDodo BabyОценок пока нет
- Analysis of The Sw-420 Vibration Sensor Performance On VibrationДокумент8 страницAnalysis of The Sw-420 Vibration Sensor Performance On VibrationZulkarnainОценок пока нет
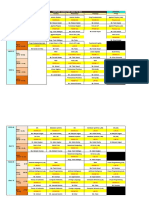
- CS (Morning) TIMETABLE FALL 2023 v1Документ4 страницыCS (Morning) TIMETABLE FALL 2023 v1Humera AnsariОценок пока нет
- Paycools Sales TrainingДокумент19 страницPaycools Sales TrainingRoxanne AngelesОценок пока нет
- 803 Java Scirpt Class XII.Документ14 страниц803 Java Scirpt Class XII.AmitОценок пока нет
- ED PlcWin 1eng Manuale 1 - 06Документ8 страницED PlcWin 1eng Manuale 1 - 06AbdullahОценок пока нет
- Amadeus SKY Suite by Optym: Taking Your Airline Network Profitability To The MAXДокумент12 страницAmadeus SKY Suite by Optym: Taking Your Airline Network Profitability To The MAXJamesОценок пока нет
- Chat GPTДокумент20 страницChat GPTAnup BarmanОценок пока нет
- Wku TRANSPORTATION MANAGEMENT SYSTEM SadДокумент11 страницWku TRANSPORTATION MANAGEMENT SYSTEM SadnebyuОценок пока нет
- Create A Document: What Do You Want To Do?Документ3 страницыCreate A Document: What Do You Want To Do?mili_ccОценок пока нет
- 277695-NetBackup Status Code 41Документ17 страниц277695-NetBackup Status Code 41Rohidas WadekarОценок пока нет
- Workshop 1.1 FEA: ANSYS Meshing BasicsДокумент20 страницWorkshop 1.1 FEA: ANSYS Meshing BasicsLeslie FanyОценок пока нет
- Short Notes On Signals & Systems by Sujal SirДокумент282 страницыShort Notes On Signals & Systems by Sujal SirHarshit SharmaОценок пока нет
- IT2090 - Professional SkillsДокумент3 страницыIT2090 - Professional SkillsThilin ThungeeshaОценок пока нет
- SetupДокумент1 055 страницSetupBalázs HorváthОценок пока нет
- Tle Ict: Quarter 4 - Module 6: Electronic SpreadsheetДокумент17 страницTle Ict: Quarter 4 - Module 6: Electronic SpreadsheetCilena DomenicinaОценок пока нет
- Forwarding (IP) Lab:: Server1 ConfigurationДокумент77 страницForwarding (IP) Lab:: Server1 ConfigurationAgus HerdiyanaОценок пока нет
- Modicon MC80 Programmable Logic Controller User ManualДокумент151 страницаModicon MC80 Programmable Logic Controller User ManualdeadzzzzzzzzzzzzОценок пока нет
- Improving Timing For FIFO by Adding RegistersДокумент7 страницImproving Timing For FIFO by Adding RegistersXiang LiОценок пока нет
- Service Manual: VHF FM TransceiverДокумент47 страницService Manual: VHF FM TransceiverAlex Igino da Silva100% (1)
- Model Answer of Questions Booklet: Question-1: Consider The Following Schema Named UniversityДокумент24 страницыModel Answer of Questions Booklet: Question-1: Consider The Following Schema Named UniversityDeadly ChillerОценок пока нет
- SHS Ict 11 M6-7Документ16 страницSHS Ict 11 M6-7Hazel Mjkristell Basallote FranceОценок пока нет
- Online Medicine Order SystemДокумент58 страницOnline Medicine Order SystemHarpreet SinghОценок пока нет
- HB Ac2 Acv2 Modbus TCP Geraeteintegration enДокумент72 страницыHB Ac2 Acv2 Modbus TCP Geraeteintegration enjonbonokОценок пока нет
- Autoranging Insulation Tester RS-232 Window Version, Data LoggerДокумент2 страницыAutoranging Insulation Tester RS-232 Window Version, Data Loggereuler165Оценок пока нет
- 1.piso Wifi ManualДокумент7 страниц1.piso Wifi ManualJessa Salor CabacangОценок пока нет
- Oracle BI Publisher 11g R1 Fundamentals (Student Guide - Volume I) (101-200) PDFДокумент100 страницOracle BI Publisher 11g R1 Fundamentals (Student Guide - Volume I) (101-200) PDFangel_ceruz20Оценок пока нет