Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Population by Region: 10 Most Populous CountriesДокумент3 страницыPopulation by Region: 10 Most Populous CountriesNarendra BabuОценок пока нет
- Register No: 100104129022 Subject Name: SURVEYING II Subject Code: 080100021Документ1 страницаRegister No: 100104129022 Subject Name: SURVEYING II Subject Code: 080100021Narendra BabuОценок пока нет
- EDD Questionier FORMATДокумент5 страницEDD Questionier FORMATNarendra BabuОценок пока нет
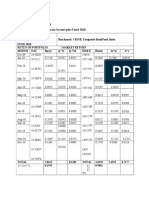
- Reliance Bond Saver Fund Table 3.31 Reliance Sundaram Income Plus Fund-2010Документ3 страницыReliance Bond Saver Fund Table 3.31 Reliance Sundaram Income Plus Fund-2010Narendra BabuОценок пока нет
- Sub: Change of Firm - Intimation - RegДокумент5 страницSub: Change of Firm - Intimation - RegNarendra BabuОценок пока нет
- Computer: Type of Product Computer Cell Phone DVDДокумент4 страницыComputer: Type of Product Computer Cell Phone DVDNarendra BabuОценок пока нет
- Kitchen Organization, Unit 4Документ24 страницыKitchen Organization, Unit 4Narendra Babu100% (1)
- PH.D Synopsis Sa Diana-2013Документ2 страницыPH.D Synopsis Sa Diana-2013Narendra BabuОценок пока нет
- Program: ServerДокумент5 страницProgram: ServerNarendra BabuОценок пока нет
- DOMAN DocumentДокумент7 страницDOMAN DocumentNarendra BabuОценок пока нет
- Declaration: Signature of The CandidateДокумент27 страницDeclaration: Signature of The CandidateNarendra BabuОценок пока нет
- List of Law Colleges Maintained by Bar Council of India With Addresses in All The States As On 10.04.2010Документ98 страницList of Law Colleges Maintained by Bar Council of India With Addresses in All The States As On 10.04.2010Amit ChaudhuriОценок пока нет
- ProgramДокумент10 страницProgramNarendra BabuОценок пока нет
- Tyit - List of Internal Guides For Project: S.R.NO Name of The Student Title Platform Guide StatusДокумент2 страницыTyit - List of Internal Guides For Project: S.R.NO Name of The Student Title Platform Guide StatusNarendra BabuОценок пока нет
- Technical Report: 3. Slot Radiography: Effective Application For Orthopedic SДокумент3 страницыTechnical Report: 3. Slot Radiography: Effective Application For Orthopedic SNarendra BabuОценок пока нет
- Train NoДокумент2 страницыTrain NoNarendra BabuОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Managing Diabetic Foot Ulcers ReadingДокумент21 страницаManaging Diabetic Foot Ulcers Readinghimanshugupta811997Оценок пока нет
- Hopeless PlacesДокумент1 304 страницыHopeless Placesmoreblessingmarvellous659Оценок пока нет
- Halfen Cast-In Channels: HTA-CE 50/30P HTA-CE 40/22PДокумент92 страницыHalfen Cast-In Channels: HTA-CE 50/30P HTA-CE 40/22PTulusОценок пока нет
- Nivel VV-VW Board User Guide enДокумент5 страницNivel VV-VW Board User Guide enHarveyWishtartОценок пока нет
- EXP4 The Diels Alder ReactionsДокумент3 страницыEXP4 The Diels Alder ReactionsLaura GuidoОценок пока нет
- Stepan Formulation 926Документ2 страницыStepan Formulation 926Moaz SiddigОценок пока нет
- Fundamentals of Pain Medicine: Jianguo Cheng Richard W. RosenquistДокумент346 страницFundamentals of Pain Medicine: Jianguo Cheng Richard W. RosenquistMayОценок пока нет
- Ad149 Manual RДокумент69 страницAd149 Manual RCharityОценок пока нет
- Top Ten Myths About The BrainДокумент5 страницTop Ten Myths About The BrainfayazalamaligОценок пока нет
- Nasopharyngeal Angiofibroma - PPTX Essam SrourДокумент10 страницNasopharyngeal Angiofibroma - PPTX Essam SrourSimina ÎntunericОценок пока нет
- Lec 4 - 4th WeekДокумент40 страницLec 4 - 4th Weekrajpoot aliОценок пока нет
- Tugas 2-TRK Lanjut Kelompok 3 Andre-Arief-IstiaДокумент18 страницTugas 2-TRK Lanjut Kelompok 3 Andre-Arief-IstiaAndre Fahriz Perdana HarahapОценок пока нет
- 5G Transport Slice Control in End-To-End 5G NetworksДокумент19 страниц5G Transport Slice Control in End-To-End 5G NetworksmorganОценок пока нет
- Stalthon Rib and InfillДокумент2 страницыStalthon Rib and InfillAndrea GibsonОценок пока нет
- Physical and Morphological Characterisation of Typha Australis FibresДокумент12 страницPhysical and Morphological Characterisation of Typha Australis FibresIJAR JOURNALОценок пока нет
- Course Syllabus: Course Code Course Title ECTS CreditsДокумент3 страницыCourse Syllabus: Course Code Course Title ECTS CreditsHanaa HamadallahОценок пока нет
- 41z S4hana2021 Set-Up en XXДокумент46 страниц41z S4hana2021 Set-Up en XXHussain MulthazimОценок пока нет
- Malvinas Gas Plant Operator Training: Paragon Engineering Services, Inc. Houston, TexasДокумент71 страницаMalvinas Gas Plant Operator Training: Paragon Engineering Services, Inc. Houston, TexasMary Cruz Meza CahuanaОценок пока нет
- 14p-220 Mud PumpДокумент2 страницы14p-220 Mud PumpMurali Sambandan50% (2)
- Oil Whirl and Whip Instabilities - Within Journal BearingsДокумент27 страницOil Whirl and Whip Instabilities - Within Journal BearingsTalha AamirОценок пока нет
- Cecilia-Puff-Tee-Final-OUSM-Designs-12 MESES A TALLA 8Документ19 страницCecilia-Puff-Tee-Final-OUSM-Designs-12 MESES A TALLA 8Jose SanchezОценок пока нет
- DMDWLab Book AnswersДокумент44 страницыDMDWLab Book AnswersNarpat Makwana Pune100% (1)
- FRP Handrail Fittings CatalogДокумент6 страницFRP Handrail Fittings CatalogAl Adel MorenoОценок пока нет
- Math COT 3Документ18 страницMath COT 3Icy Mae SenadosОценок пока нет
- Assignment 2 Unit 20 Fully Completed - ReviewedДокумент5 страницAssignment 2 Unit 20 Fully Completed - Reviewedchris.orisawayiОценок пока нет
- 300 PSI CTS (MP-1115) Operation Manual Rev1.3Документ18 страниц300 PSI CTS (MP-1115) Operation Manual Rev1.3Juan Manuel VizosoОценок пока нет
- Lesson 1 Chapter 9 ErosiondepositionДокумент1 страницаLesson 1 Chapter 9 Erosiondepositionapi-249320969Оценок пока нет
- Training Report On Self Contained Breathing ApparatusДокумент4 страницыTraining Report On Self Contained Breathing ApparatusHiren MahetaОценок пока нет
- Cargo ManagementДокумент45 страницCargo ManagementShubham Chaurasia75% (8)
- Catalogo Aesculap PDFДокумент16 страницCatalogo Aesculap PDFHansОценок пока нет