Вам также может понравиться
- Prácticas Controles EléctricosДокумент11 страницPrácticas Controles EléctricosAlonso Herrera AguilarОценок пока нет
- Guía INSTRON 1323Документ28 страницGuía INSTRON 1323EJ CFОценок пока нет
- Dispositivos de MandoДокумент8 страницDispositivos de Mandojox5Оценок пока нет
- Válvulas de Aire Adicional DicertacionДокумент26 страницVálvulas de Aire Adicional DicertacionDaniller Anabalon Carrasco67% (3)
- 2 - Diagramas de Alambrado y Control - 2Документ2 страницы2 - Diagramas de Alambrado y Control - 2José GonzálezОценок пока нет
- Manual de Operación Del Sistema Posi StopДокумент9 страницManual de Operación Del Sistema Posi StopJesus AristizabalОценок пока нет
- Practica 8Документ8 страницPractica 8nachillowОценок пока нет
- Práctica 5Документ4 страницыPráctica 5Carlos Abner Vargas LermaОценок пока нет
- Circuitos Elementales Usados en Los Sistemas de Control de Motores EléctricosДокумент8 страницCircuitos Elementales Usados en Los Sistemas de Control de Motores EléctricosMarcos Javier Camacho LópezОценок пока нет
- Algo de Control EléctricoДокумент31 страницаAlgo de Control EléctricoPerez LopezОценок пока нет
- Practica5 1822094Документ4 страницыPractica5 1822094jesus gonzalez bravoОценок пока нет
- Circuito de Control A Dos HilosДокумент9 страницCircuito de Control A Dos HilosSuishy80% (5)
- Actividad 3 PLC SenaДокумент5 страницActividad 3 PLC Senapedro andres vargas carreñoОценок пока нет
- Automatismo Laboratorio3 Grupo 6Документ16 страницAutomatismo Laboratorio3 Grupo 6SOVERO LUNA MIGUEL ANGELОценок пока нет
- Guia 4Документ8 страницGuia 4Ricardo PonceОценок пока нет
- Sistema de control electro neumáticoДокумент7 страницSistema de control electro neumáticoNathaline MataОценок пока нет
- Examen Parcial de Controles Electricos y AutomatizacionДокумент24 страницыExamen Parcial de Controles Electricos y AutomatizacionKevin SantamariaОценок пока нет
- Capítulo 07Документ8 страницCapítulo 07Oscar EstradaОценок пока нет
- Practica 4Документ8 страницPractica 4Omar Leopoldo Rodriguez HernandezОценок пока нет
- Practica 5Документ4 страницыPractica 5Kennet Alejandro García ZamarrónОценок пока нет
- Sistemas de Marcha LentaДокумент8 страницSistemas de Marcha LentaingenierocardonaОценок пока нет
- Circuito de Control A Dos HilosДокумент62 страницыCircuito de Control A Dos HilosSuishy100% (2)
- Cap 8 Automatizaciones Lineales Con TemporizadoresДокумент11 страницCap 8 Automatizaciones Lineales Con TemporizadoresAdrian Medina DiazОценок пока нет
- UNIDAD 4 Acciones Basicas de ControlДокумент20 страницUNIDAD 4 Acciones Basicas de ControlricardobarajasОценок пока нет
- Válvula regulación velocidad motor ralentiДокумент8 страницVálvula regulación velocidad motor ralentiVides AyalaОценок пока нет
- Cap 1 PLC PARTE BДокумент42 страницыCap 1 PLC PARTE BBree GomОценок пока нет
- Válvulas de control de presión en práctica de laboratorioДокумент10 страницVálvulas de control de presión en práctica de laboratorioAilthon JairОценок пока нет
- Balanceo Hidraulico de Aire AcondicionadoДокумент6 страницBalanceo Hidraulico de Aire Acondicionadojeison122Оценок пока нет
- Control de ActuadoresДокумент8 страницControl de Actuadoresamaranta98712Оценок пока нет
- Tablero Contra IncendioДокумент3 страницыTablero Contra IncendioCésar JcОценок пока нет
- Panel de Control Remoto de La BopsДокумент12 страницPanel de Control Remoto de La BopsJesus Steban Montaña SanzОценок пока нет
- Informe de La Bolsa de Aire Exposicion (Autoguardado)Документ14 страницInforme de La Bolsa de Aire Exposicion (Autoguardado)Sergio Gustavo Herrera ArellanoОценок пока нет
- Actuadores de Texto GuiaДокумент27 страницActuadores de Texto GuiaSanti VillacisОценок пока нет
- Instructivo VSD Rev 1Документ4 страницыInstructivo VSD Rev 1ingenieria_377024831Оценок пока нет
- Circuito de Control para MotoresДокумент33 страницыCircuito de Control para MotoresVictor Ivan M BОценок пока нет
- Control de Velocidad HidraulicoДокумент9 страницControl de Velocidad HidraulicoRobinson BangueroОценок пока нет
- Práctica Lab de Potencia FluidaДокумент6 страницPráctica Lab de Potencia FluidaKevin Montoya100% (2)
- Chinga Tu Madre PonsoДокумент14 страницChinga Tu Madre PonsoArmando LopezОценок пока нет
- Introduccion Practica 1Документ6 страницIntroduccion Practica 1Juan Carlos Lopez GutierrezОценок пока нет
- 23E Caja AutomaticaДокумент9 страниц23E Caja AutomaticaVictor Hugo ParraОценок пока нет
- Actividad 4 M3S2Документ17 страницActividad 4 M3S2Leo DávilaОценок пока нет
- Practica 1 Arranque y Paro de Un MotorДокумент9 страницPractica 1 Arranque y Paro de Un MotorChuy Martinez OrtegaОценок пока нет
- Reporte 3 Arranque y Paro de Motor Con EnclaveДокумент12 страницReporte 3 Arranque y Paro de Motor Con EnclaveDanperdomoОценок пока нет
- Sistema de Suministro de BateríasДокумент25 страницSistema de Suministro de BateríasThomas BravoОценок пока нет
- Circuito de Control A 2 Hilos y A Tres HilosДокумент3 страницыCircuito de Control A 2 Hilos y A Tres HilosYealsatoОценок пока нет
- Valvula de Flujo Compensada y SinДокумент9 страницValvula de Flujo Compensada y SinYoli Roli Panuera CondoriОценок пока нет
- SHN - PC1 - Apellidos y NombresДокумент14 страницSHN - PC1 - Apellidos y NombresEllis Gerson Vasquez Chacon100% (1)
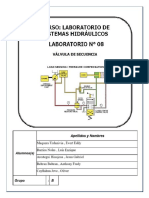
- Lab 8 Valvula de SecuenciaДокумент14 страницLab 8 Valvula de SecuenciaEvertEddyMaqueraUrdaniviaОценок пока нет
- Reporte de PrácticasДокумент34 страницыReporte de PrácticasLuis Felipe CruzОценок пока нет
- Investigacion Tipos de Valvúlas HidraúlicasДокумент10 страницInvestigacion Tipos de Valvúlas HidraúlicasCarlos HernandezОценок пока нет
- Control de Motores Con Rele TemporizadoresДокумент9 страницControl de Motores Con Rele TemporizadoresAlfredo Esobar Tino100% (1)
- Mando de Un Motor Desde Tres Puntos & Control de TiempoДокумент6 страницMando de Un Motor Desde Tres Puntos & Control de TiempoMijhael FernandezОценок пока нет
- Cap 3 Circuitos Basicos de ControlДокумент16 страницCap 3 Circuitos Basicos de ControlAdrian Medina DiazОценок пока нет
- Acciones Basicas de ControlДокумент19 страницAcciones Basicas de ControlAnival Toribio Ortiz GonzalezОценок пока нет
- Introduccion Sistemas Control ElectricoДокумент35 страницIntroduccion Sistemas Control ElectricoChristian Aros BobadillaОценок пока нет
- Tarea 1.6 Final de Carrera Neumático y Regulador CaudalДокумент19 страницTarea 1.6 Final de Carrera Neumático y Regulador CaudalRonaldo EscamillaОценок пока нет
- VCU: Manual de funcionamiento y diagnósticoДокумент32 страницыVCU: Manual de funcionamiento y diagnósticoFrank David Duarte SalamancaОценок пока нет
- Curso Reparacion Cuerpo de Valvulas PDFДокумент79 страницCurso Reparacion Cuerpo de Valvulas PDFJesus Roa100% (2)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoОт EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoРейтинг: 4 из 5 звезд4/5 (4)
- Mantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409От EverandMantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409Рейтинг: 4.5 из 5 звезд4.5/5 (7)
- Trabajo de Seg. E Hig. IndДокумент6 страницTrabajo de Seg. E Hig. IndElvi AntonioОценок пока нет
- 020 - Guia de Reparacion Inversores y Tarjetas Lite 512-812 PDFДокумент7 страниц020 - Guia de Reparacion Inversores y Tarjetas Lite 512-812 PDFElvi Antonio75% (4)
- Trabajo de Seg. E Hig. IndДокумент6 страницTrabajo de Seg. E Hig. IndElvi AntonioОценок пока нет
- Trabajo de Seg. E Hig. IndДокумент7 страницTrabajo de Seg. E Hig. IndElvi AntonioОценок пока нет
- Tipos de Empalmes EléctricosДокумент2 страницыTipos de Empalmes EléctricosElvi AntonioОценок пока нет
- Examn de RebobinadoДокумент2 страницыExamn de RebobinadoElvi AntonioОценок пока нет
- Tablaretenciones 2011Документ33 страницыTablaretenciones 2011Patricia Torres PinedaОценок пока нет
- D AlexiaДокумент2 страницыD AlexiaElvi AntonioОценок пока нет
- Tablaretenciones 2011Документ33 страницыTablaretenciones 2011Patricia Torres PinedaОценок пока нет
- Programa de Pic para Un InversorДокумент1 страницаPrograma de Pic para Un InversorElvi AntonioОценок пока нет
- Evaluacion de MaquinaДокумент2 страницыEvaluacion de MaquinaElvi AntonioОценок пока нет
- Transformador trifásico 120V 80V 0V para carga de 12V 1kWДокумент1 страницаTransformador trifásico 120V 80V 0V para carga de 12V 1kWElvi AntonioОценок пока нет
- Examen de MaquinaДокумент4 страницыExamen de MaquinaElvi AntonioОценок пока нет
- Asm Desde Cero (2009)Документ47 страницAsm Desde Cero (2009)manuel.corrales100% (3)
- 020 Cableado CargadoraДокумент1 страница020 Cableado CargadoraElvi AntonioОценок пока нет
- 020 Cableado ReductorДокумент1 страница020 Cableado ReductorElvi AntonioОценок пока нет
- Motor UniversalДокумент3 страницыMotor UniversalMarco Antonio Fernández DarribaОценок пока нет
- Bombas de AguaДокумент29 страницBombas de AguaElvi AntonioОценок пока нет
- Autoconcepto 1208987441348272 8Документ21 страницаAutoconcepto 1208987441348272 8Elvi AntonioОценок пока нет
- Lógica CombinacionalДокумент28 страницLógica CombinacionalJonathan PerryОценок пока нет
- Ejercicios BinarioДокумент4 страницыEjercicios BinarioChristian Ramirez HernandeОценок пока нет
- Microcontroladores 1ra ParteДокумент40 страницMicrocontroladores 1ra ParteJair Eviel Barrios Deluquez100% (10)
- Diseño CCM extractores PDVSAДокумент189 страницDiseño CCM extractores PDVSAkemderОценок пока нет
- Contactores G.EДокумент76 страницContactores G.EAlberto ChoezОценок пока нет
- Laboratorio 2 Instalaciones Eléctricas 2015 GUIA 2 2015Документ12 страницLaboratorio 2 Instalaciones Eléctricas 2015 GUIA 2 2015Wilber ChavezОценок пока нет
- Reconocimiento de Los Elementos Del Banco de Trabajo de ElectroneumaticaДокумент7 страницReconocimiento de Los Elementos Del Banco de Trabajo de ElectroneumaticaTHE HEROОценок пока нет
- Taller Arranque Estrella-TriánguloДокумент13 страницTaller Arranque Estrella-Triánguloosgue08Оценок пока нет
- Pruebas Al Sistema de EncendidoДокумент14 страницPruebas Al Sistema de EncendidoGiancarlo Cardenas NinaОценок пока нет
- LEM 434 - 25 30 45 60 - 230 - EsДокумент12 страницLEM 434 - 25 30 45 60 - 230 - Estelecomunicacionesos0% (1)
- U2 Inf Electroneumatica GrafcetДокумент6 страницU2 Inf Electroneumatica GrafcetEdwin BunciОценок пока нет
- Frenos SEWДокумент40 страницFrenos SEWPedroN.Goiris100% (2)
- EReleДокумент6 страницEReleGuido LópezОценок пока нет
- Especificaciones Centerline 2100Документ63 страницыEspecificaciones Centerline 2100riferviz100% (1)
- Designaciones de Los Puntos de Conexión de Los Aparatos de ManiobraДокумент5 страницDesignaciones de Los Puntos de Conexión de Los Aparatos de ManiobrajhinojosaОценок пока нет
- Perforaciones y Armado de Caja EléctricaДокумент16 страницPerforaciones y Armado de Caja EléctricaJod RvsОценок пока нет
- Solucion Del Examen SustitutoriaДокумент6 страницSolucion Del Examen Sustitutoriaharlyn159Оценок пока нет
- Reseña Histórica de AutomatismoДокумент11 страницReseña Histórica de AutomatismoGerman HurtadoОценок пока нет
- Luces de Marcha AtrásДокумент5 страницLuces de Marcha AtrásIngrid Sernaqué100% (1)
- Simbología eléctricaДокумент8 страницSimbología eléctricaLuis RolaОценок пока нет
- Software ProfiCADДокумент10 страницSoftware ProfiCADJHONY JAVIER ROQUE AVALOSОценок пока нет
- Categoria de ServicioДокумент3 страницыCategoria de ServicioCorina Fraszczak100% (1)
- 8 - ContactoresДокумент19 страниц8 - ContactoresJaime Valeriano SarzuriОценок пока нет
- Instalaciones Eléctricas DomiciliariasДокумент130 страницInstalaciones Eléctricas DomiciliariasfranchiapeОценок пока нет
- Plano Conexion Automatico ...Документ1 страницаPlano Conexion Automatico ...Pérez Solís EddyОценок пока нет
- Curso Thyne6Документ100 страницCurso Thyne6Enrique G.Оценок пока нет
- Informe 6Документ13 страницInforme 6ivan1989104Оценок пока нет
- 5 - Guardas y Dsipositivos de ProteccionДокумент16 страниц5 - Guardas y Dsipositivos de ProteccionSteban MuñozОценок пока нет
- Informe Practicas ElectroNeumatica Gordillo SiavichayДокумент5 страницInforme Practicas ElectroNeumatica Gordillo SiavichayDavid MinchalaОценок пока нет
- CADe SimuДокумент8 страницCADe SimuJairo Manuel Saavedra AcostaОценок пока нет
- Proyecto Regularización Eléctrica y Red Datos Liceo Siete de NiñasДокумент56 страницProyecto Regularización Eléctrica y Red Datos Liceo Siete de NiñasAni Pisan100% (1)
- Arranque de MotoresДокумент7 страницArranque de MotoresEddy ArreolaОценок пока нет
- Investigacion Esquemafusible Grupo1Документ10 страницInvestigacion Esquemafusible Grupo1Fabricio Veintimilla BautistaОценок пока нет