Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Anisotropic DiffusionДокумент53 страницыAnisotropic DiffusionAjayaHSОценок пока нет
- Syllabus 1styearДокумент40 страницSyllabus 1styearAjayaHSОценок пока нет
- MSP 430 G 2553Документ75 страницMSP 430 G 2553diosb3Оценок пока нет
- Balance Sheet Lone Pine CafeДокумент2 страницыBalance Sheet Lone Pine CafeAjayaHSОценок пока нет
- Kalman Filter ImplementationДокумент6 страницKalman Filter ImplementationAjayaHSОценок пока нет
- CR - Simon HaykinДокумент20 страницCR - Simon HaykinAjayaHSОценок пока нет
- Slot Antennas Material PDFДокумент8 страницSlot Antennas Material PDFAjayaHSОценок пока нет
- 10 1 1 91 6809Документ208 страниц10 1 1 91 6809AjayaHSОценок пока нет
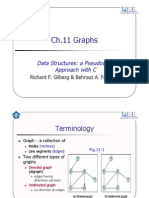
- Ch.11 Graphs: Data Structures: A Pseudocode Approach With CДокумент65 страницCh.11 Graphs: Data Structures: A Pseudocode Approach With CAjayaHSОценок пока нет
- Robust Face Recognition Via Sparse Representation-Zz PDFДокумент68 страницRobust Face Recognition Via Sparse Representation-Zz PDFAjayaHSОценок пока нет
- Ch2 Antenna BasicsДокумент46 страницCh2 Antenna BasicsChihyun Cho100% (1)
- Signals and Systems With MATLAB Computing and Simulink Modeling - Steven T. KarrisДокумент651 страницаSignals and Systems With MATLAB Computing and Simulink Modeling - Steven T. KarrisvalstavОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Anabela Oliveira's ResumeДокумент2 страницыAnabela Oliveira's ResumeAnabela OliveiraОценок пока нет
- OpTransactionHistoryUX324 01 2020 PDFДокумент4 страницыOpTransactionHistoryUX324 01 2020 PDFHimavanth ReddyОценок пока нет
- 16-Inch MacBook Pro - Space Gray - AppleДокумент3 страницы16-Inch MacBook Pro - Space Gray - AppleMGDC-IBESTОценок пока нет
- Crabby's Top 10 E-Mail Crabs: Crab #1: Discretion Is The Greater Part of ReplyingДокумент9 страницCrabby's Top 10 E-Mail Crabs: Crab #1: Discretion Is The Greater Part of ReplyingSarangОценок пока нет
- Management Wisdom of Lord Krishna by Udaivir Singh 2008 01 01 B01K8ZPSC6 PDFДокумент1 страницаManagement Wisdom of Lord Krishna by Udaivir Singh 2008 01 01 B01K8ZPSC6 PDFSiddhantОценок пока нет
- MetroSelect Configuration Guide 02407HДокумент210 страницMetroSelect Configuration Guide 02407Hraptor_negroОценок пока нет
- A Fortran 90 TutorialДокумент80 страницA Fortran 90 TutorialBoud ElhassanОценок пока нет
- Baumer ManualДокумент39 страницBaumer ManualGerardo Perez ValdebenitoОценок пока нет
- Business CaseДокумент18 страницBusiness CaseMwawiОценок пока нет
- New Flow GraphДокумент8 страницNew Flow GraphImam Gunawan100% (1)
- Computer Organisation and DesignДокумент84 страницыComputer Organisation and DesignVatika GuptaОценок пока нет
- Lenovo Secret CodesДокумент7 страницLenovo Secret CodesfetniОценок пока нет
- The History of Advanced Media Group From 1989 Published May 7, 2016Документ195 страницThe History of Advanced Media Group From 1989 Published May 7, 2016Stan J. CaterboneОценок пока нет
- Format Types - Bluetooth Technology WebsiteДокумент3 страницыFormat Types - Bluetooth Technology WebsiteAshok Siva Kumar PoojalaОценок пока нет
- Skills: Technical Skills Practical Skills Software SkillsДокумент2 страницыSkills: Technical Skills Practical Skills Software SkillsSeul BiОценок пока нет
- Pattern Recognition and Image Processing in C++-Vieweg+Teubner Verlag (1995)Документ369 страницPattern Recognition and Image Processing in C++-Vieweg+Teubner Verlag (1995)hazim_74Оценок пока нет
- Airtel ServqualДокумент2 страницыAirtel ServqualVashishtha DadhichОценок пока нет
- SOA Essential PlaybookДокумент7 страницSOA Essential PlaybookshuebscribdОценок пока нет
- Physical Database Design Using OracleДокумент264 страницыPhysical Database Design Using OracleAMEYОценок пока нет
- SVDR-Pro Installation 071015 Rev.1.2Документ76 страницSVDR-Pro Installation 071015 Rev.1.2lollardОценок пока нет
- Unit 19 Ta Ündem Formacio ÜnДокумент16 страницUnit 19 Ta Ündem Formacio ÜnSergio RugeОценок пока нет
- 10 Image Segmentation April 2019Документ20 страниц10 Image Segmentation April 2019Eng DlovanОценок пока нет
- Very Improtant NormalisationДокумент5 страницVery Improtant NormalisationpoonamОценок пока нет
- Lab Handout 3 DHCP DNS HTTPДокумент3 страницыLab Handout 3 DHCP DNS HTTPapi-3739389Оценок пока нет
- Interview Question & AnswerДокумент10 страницInterview Question & AnswerANKIT MITTALОценок пока нет
- Tension CalculationsДокумент3 страницыTension CalculationsSindhura KaranamОценок пока нет
- Boundary-Value Problems: Example 6.1-1Документ4 страницыBoundary-Value Problems: Example 6.1-1Munir AslamОценок пока нет
- AppBuild PDFДокумент312 страницAppBuild PDFVarun TejОценок пока нет
- Terminator 2029 Operation ScourДокумент20 страницTerminator 2029 Operation ScourThea_VatarОценок пока нет
- Soft Computing SYLLABUSДокумент2 страницыSoft Computing SYLLABUSgfdxgxgnxОценок пока нет