Вам также может понравиться
- Hybrid RANS-LES Turbulence Models On Unstructured Grids: C. Eric Lynch and Marilyn J. SmithДокумент14 страницHybrid RANS-LES Turbulence Models On Unstructured Grids: C. Eric Lynch and Marilyn J. SmithAerospaceAngelОценок пока нет
- Chapter 5: Internal Convection: Section 5.1: Internal Flow ConceptsДокумент53 страницыChapter 5: Internal Convection: Section 5.1: Internal Flow ConceptsAerospaceAngelОценок пока нет
- Numerical Prediction of Buffeting and Calculation of Transient Boundary Layer Separation Over AirfoilsДокумент7 страницNumerical Prediction of Buffeting and Calculation of Transient Boundary Layer Separation Over AirfoilsAerospaceAngelОценок пока нет
- FTFS Chap22 P041Документ36 страницFTFS Chap22 P041AerospaceAngelОценок пока нет
- 8 ETC 2011 AA CC Jan 2011Документ11 страниц8 ETC 2011 AA CC Jan 2011AerospaceAngelОценок пока нет
- Adaptation of The Method of Lines (MOL) To The MATLAB Code For The Analysis of The Stefan ProblemДокумент8 страницAdaptation of The Method of Lines (MOL) To The MATLAB Code For The Analysis of The Stefan ProblemAerospaceAngelОценок пока нет
- 5-Aerofast Development of Cork TPS Material and A 3D ComparativeДокумент13 страниц5-Aerofast Development of Cork TPS Material and A 3D ComparativeAerospaceAngelОценок пока нет
- FLIGHT International, 28 June 1962: Table3: TurbopropsДокумент1 страницаFLIGHT International, 28 June 1962: Table3: TurbopropsAerospaceAngelОценок пока нет
- Numerical Study of Hypersonic Receptivity With Thermochemical Non-Equilibrium On A Blunt ConeДокумент18 страницNumerical Study of Hypersonic Receptivity With Thermochemical Non-Equilibrium On A Blunt ConeAerospaceAngelОценок пока нет
- Advanced Paper Aircraft Construction MK II-more Easy-To-make Flyable ModelsДокумент20 страницAdvanced Paper Aircraft Construction MK II-more Easy-To-make Flyable ModelsAerospaceAngel100% (3)
- Getting Started May A 2011Документ1 044 страницыGetting Started May A 2011Vasilis_Siskos_8195100% (1)
- The F-14 TomcatДокумент19 страницThe F-14 TomcatAerospaceAngel100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- British Microlight Aircraft Association Homebuilt Aircraft Data Sheet (Hads) No: Hm4 Issue: 18 Skyranger (Uk)Документ26 страницBritish Microlight Aircraft Association Homebuilt Aircraft Data Sheet (Hads) No: Hm4 Issue: 18 Skyranger (Uk)Mario GomesОценок пока нет
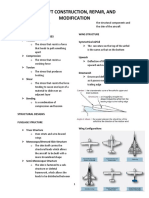
- Aircraft Construction Repair and ModificationДокумент49 страницAircraft Construction Repair and Modification알신제인Оценок пока нет
- NMD Atm GoaДокумент2 страницыNMD Atm GoasiddalinganagoudaОценок пока нет
- Hawker 900XP MiscmodesДокумент99 страницHawker 900XP Miscmodesravi k singhОценок пока нет
- PCAR PART-6-Approved-Maintenance-Organization-2Документ76 страницPCAR PART-6-Approved-Maintenance-Organization-2Darlene Baquing-BaloaloaОценок пока нет
- Fuselage StructureДокумент3 страницыFuselage StructureKabilan SiranjiviОценок пока нет
- Getting To Grips With Etops Volume II - The Flight Operations ViewДокумент46 страницGetting To Grips With Etops Volume II - The Flight Operations Viewbusav8rОценок пока нет
- Nano Letters Volume Issue (Doi 10.2514/6.1997-3137)Документ5 страницNano Letters Volume Issue (Doi 10.2514/6.1997-3137)Sina Mohammadi ZadehОценок пока нет
- Flight Dispatch Manual Issue 2 Revision OriginalДокумент218 страницFlight Dispatch Manual Issue 2 Revision OriginalAleksandr Synyavskyy100% (3)
- ATPL 5918 PreguntasДокумент489 страницATPL 5918 PreguntasB2B390% (10)
- A Brief Introduction To Helicopters: Penn TateДокумент28 страницA Brief Introduction To Helicopters: Penn TateLight HouseОценок пока нет
- Principles of FlightДокумент456 страницPrinciples of Flightdkskmuiaeemkgftsmr100% (1)
- Rotary Wing Aircraft Handbooks and History Volume 11 Special Types of Rotary Wing AircraftДокумент136 страницRotary Wing Aircraft Handbooks and History Volume 11 Special Types of Rotary Wing Aircraftpiolenc@archivale.com50% (2)
- AdpiiДокумент70 страницAdpiiManoj RasailyОценок пока нет
- Maintenance Program (MP) Issue 1 Rev. 0 Copy 01Документ301 страницаMaintenance Program (MP) Issue 1 Rev. 0 Copy 01Александр ТаракановОценок пока нет
- 96M-CH605 Partes y HerramientasДокумент6 страниц96M-CH605 Partes y HerramientasAraceli ZuñigaОценок пока нет
- 02 USOAP CMA Protocol Questions - AGA - 20180118Документ64 страницы02 USOAP CMA Protocol Questions - AGA - 20180118Hassan ElmiОценок пока нет
- Case Study BISДокумент11 страницCase Study BISDamien MoriceОценок пока нет
- Brantly Helicopter ReportДокумент4 страницыBrantly Helicopter Reportjorge paezОценок пока нет
- Advisory Circular 139.v 01 Guidance Vertiport DesignДокумент40 страницAdvisory Circular 139.v 01 Guidance Vertiport DesignRobin ChenОценок пока нет
- 7.1 Performance89oДокумент162 страницы7.1 Performance89oSalman SiddiquiОценок пока нет
- Cessna 525 General Aircraft DescriptionДокумент5 страницCessna 525 General Aircraft DescriptionCesar BanchoffОценок пока нет
- Kistler Launch Vehicle Payload Planners GuideДокумент50 страницKistler Launch Vehicle Payload Planners GuideOrion2015Оценок пока нет
- Klax DAL1512 Ksfo: NotesДокумент6 страницKlax DAL1512 Ksfo: NotesIvan Barbosa MejíaОценок пока нет
- TJSJMDSD PDF 1621796793Документ16 страницTJSJMDSD PDF 1621796793Emerald GrОценок пока нет
- RISEN 915is Pilot Operating HandbookДокумент66 страницRISEN 915is Pilot Operating HandbookJose MasettiОценок пока нет
- AerodynamicsДокумент93 страницыAerodynamicsduloo786100% (1)
- TAC Attack March 1961Документ20 страницTAC Attack March 1961TateОценок пока нет
- Panel Ejets PDFДокумент3 страницыPanel Ejets PDFEdd PO100% (1)
- Your Airline: Normal ChecklistДокумент1 страницаYour Airline: Normal ChecklistМистермарк МистерклимюкОценок пока нет