Вам также может понравиться
- Winning at New ProductsДокумент24 страницыWinning at New Products劉緯文100% (1)
- TRANSLATIONДокумент4 страницыTRANSLATIONGarren Jude Aquino100% (1)
- Title DefenseДокумент3 страницыTitle DefenseLiezl Sabado100% (1)
- The Big Table of Quantum AIДокумент7 страницThe Big Table of Quantum AIAbu Mohammad Omar Shehab Uddin AyubОценок пока нет
- Variable Frequency DriveДокумент8 страницVariable Frequency DriveNAYEEM100% (1)
- Collaboration Proposal FormДокумент4 страницыCollaboration Proposal FormGabriel TecuceanuОценок пока нет
- Symbol Error Probability and Bit Error Probability For Optimum Combining With MPSK ModulationДокумент14 страницSymbol Error Probability and Bit Error Probability For Optimum Combining With MPSK ModulationEmily PierisОценок пока нет
- Maximum Likelihood Frame Synchronization Flat Fading: ChannelsДокумент5 страницMaximum Likelihood Frame Synchronization Flat Fading: ChannelsfilmonОценок пока нет
- Z-Transform Representation of Discrete-Time Signals and SystemsДокумент40 страницZ-Transform Representation of Discrete-Time Signals and SystemsFreddy PesantezОценок пока нет
- The Upward Bias in Measures ofДокумент9 страницThe Upward Bias in Measures ofPranav NyatiОценок пока нет
- Applied and Computational Harmonic Analysis: Emmanuel J. Candès, Mark A. DavenportДокумент7 страницApplied and Computational Harmonic Analysis: Emmanuel J. Candès, Mark A. DavenportCatalin TomaОценок пока нет
- Brent ElementaryДокумент10 страницBrent ElementaryLovinf FlorinОценок пока нет
- Goodstein 1944Документ10 страницGoodstein 1944botswanaОценок пока нет
- Solon Esguerra Periods of Relativistic Oscillators With Even Polynomial PotentialsДокумент12 страницSolon Esguerra Periods of Relativistic Oscillators With Even Polynomial PotentialsJose Perico EsguerraОценок пока нет
- On Stochastic Limit and Order RelationshipsДокумент11 страницOn Stochastic Limit and Order Relationships林宗霖Оценок пока нет
- 2002 - Donoho, Elad - Maximal Sparsity Representation Via L 1 MinimizationДокумент28 страниц2002 - Donoho, Elad - Maximal Sparsity Representation Via L 1 MinimizationsanaОценок пока нет
- Dantzig SelectorДокумент35 страницDantzig SelectorehsanОценок пока нет
- Arena Stanfordlecturenotes11Документ9 страницArena Stanfordlecturenotes11Victoria MooreОценок пока нет
- ) W !"#$%&' +,-./012345 Ya - Fi Mu: Discounted Properties of Probabilistic Pushdown AutomataДокумент33 страницы) W !"#$%&' +,-./012345 Ya - Fi Mu: Discounted Properties of Probabilistic Pushdown Automatasmart_gaurav3097Оценок пока нет
- Pade ApproximationДокумент6 страницPade ApproximationSaurabh AnmadwarОценок пока нет
- Nakagami2 Rev4Документ3 страницыNakagami2 Rev4ganathippu1Оценок пока нет
- Poisson FormulaДокумент15 страницPoisson FormulaRiki NurzamanОценок пока нет
- A Characterization of PositiveДокумент16 страницA Characterization of PositiveThiago NobreОценок пока нет
- Encoding The Ball From Limited MeasurementsДокумент10 страницEncoding The Ball From Limited MeasurementsPolaniaCabreraОценок пока нет
- A Reliable Randomized Algorithm For The Closest-Pair ProblemДокумент33 страницыA Reliable Randomized Algorithm For The Closest-Pair ProblemkletomzОценок пока нет
- Digital Communication, Continuation Course: Additional Material ForДокумент16 страницDigital Communication, Continuation Course: Additional Material ForDileep BapatlaОценок пока нет
- General Least Squares Smoothing and Differentiation of Nonuniformly Spaced Data by The Convolution Method.Документ3 страницыGeneral Least Squares Smoothing and Differentiation of Nonuniformly Spaced Data by The Convolution Method.Vladimir PelekhatyОценок пока нет
- Ca07 RgIto TextДокумент18 страницCa07 RgIto TextTerwal Aandrés Oortiz VargasОценок пока нет
- Factor IzationДокумент13 страницFactor Izationoitc85Оценок пока нет
- 03-LRT ErrorTradeoffs NPДокумент11 страниц03-LRT ErrorTradeoffs NPmohamedОценок пока нет
- Northern Technical UniversityДокумент8 страницNorthern Technical Universityوسام سامي محمدОценок пока нет
- Newton 2Документ8 страницNewton 2وسام سامي محمدОценок пока нет
- Parametric Spectrum EstimationДокумент20 страницParametric Spectrum Estimationvils_rebel619Оценок пока нет
- Fast Integer Multiplication Using Modular ArithmeticДокумент12 страницFast Integer Multiplication Using Modular ArithmeticAnonymous 9JBZgzОценок пока нет
- AnL P Inequality For PolynomialsДокумент10 страницAnL P Inequality For PolynomialsTanveerdarziОценок пока нет
- L1 QueueДокумент9 страницL1 QueueThiem Hoang XuanОценок пока нет
- A Gaussian Channel With Slow FadingДокумент3 страницыA Gaussian Channel With Slow Fadinglavanyakdp79Оценок пока нет
- Capture Analysis in Wireless Radio Systems With Multi-Packet Reception CapabilitiesДокумент5 страницCapture Analysis in Wireless Radio Systems With Multi-Packet Reception CapabilitiesJean ReneОценок пока нет
- Chap7 Digital FilterДокумент18 страницChap7 Digital FilterAzeem AliОценок пока нет
- The Impact of A Priori Information On The Map Equalizer Performance With M-PSK ModulationДокумент5 страницThe Impact of A Priori Information On The Map Equalizer Performance With M-PSK Modulationnguyentai325Оценок пока нет
- The Catenary and Tame Degree in Finitely Generated Commutative Cancellative MonoidsДокумент11 страницThe Catenary and Tame Degree in Finitely Generated Commutative Cancellative MonoidsRajesh ParekhОценок пока нет
- Lecture08 1Документ3 страницыLecture08 1lgiansantiОценок пока нет
- AssignmentДокумент6 страницAssignmentAashutosh SharmaОценок пока нет
- Singularities of Holomorphic Foliations: To S. S. Chern & D. C. Spencer On Their 60th BirthdaysДокумент64 страницыSingularities of Holomorphic Foliations: To S. S. Chern & D. C. Spencer On Their 60th BirthdaysandreОценок пока нет
- 1960 Max: Qu, Antixing For Minimum Distortion 7Документ6 страниц1960 Max: Qu, Antixing For Minimum Distortion 7Chathura LakmalОценок пока нет
- M/M/1 Queueing ModelДокумент12 страницM/M/1 Queueing ModelSparrowGospleGilbertОценок пока нет
- Treaps, Verification, and String MatchingДокумент6 страницTreaps, Verification, and String MatchingGeanina BalanОценок пока нет
- D Sesqunces RandomnessДокумент8 страницD Sesqunces RandomnessSeshareddy KatamОценок пока нет
- Basictechniquespercolation 15 Mar 16Документ4 страницыBasictechniquespercolation 15 Mar 16Siana Alinda AniseОценок пока нет
- Ahl GrenДокумент9 страницAhl GrengigiventuzaОценок пока нет
- Alternating Group & Parity of PermutationsДокумент11 страницAlternating Group & Parity of PermutationsArjun BanerjeeОценок пока нет
- Alternating Group & Parity of PermutationsДокумент11 страницAlternating Group & Parity of PermutationsArjun BanerjeeОценок пока нет
- 1 Introduction To Complexity Theory: 1.1 Basic NotationДокумент10 страниц1 Introduction To Complexity Theory: 1.1 Basic Notationseo practiseОценок пока нет
- Basic PRAM Algorithm Design TechniquesДокумент13 страницBasic PRAM Algorithm Design TechniquessandeeproseОценок пока нет
- Neyman Pearson DetectorsДокумент5 страницNeyman Pearson DetectorsGuilherme DattoliОценок пока нет
- Lemaire Et Al. - 2020 - New Weak Error Bounds and Expansions For Optimal QДокумент25 страницLemaire Et Al. - 2020 - New Weak Error Bounds and Expansions For Optimal QManuel MirandaОценок пока нет
- Integer Factorization Algorithms: Connelly BarnesДокумент17 страницInteger Factorization Algorithms: Connelly BarnesRubens Vilhena FonsecaОценок пока нет
- Johansen, S. (1988) - Statistical Analysis of Cointegration VectorsДокумент24 страницыJohansen, S. (1988) - Statistical Analysis of Cointegration VectorsJoshua Maverick Ecafssa Sparrow100% (2)
- Lec 25Документ4 страницыLec 25pro.harsh.aggarwalОценок пока нет
- Root Locus: ROBT303 Linear Control Theory With LabДокумент38 страницRoot Locus: ROBT303 Linear Control Theory With LabrightheartedОценок пока нет
- Chap 3 Capacity of AWGN ChannelsДокумент12 страницChap 3 Capacity of AWGN ChannelsWesley LiverpoolОценок пока нет
- Graf 1997 MN PDFДокумент21 страницаGraf 1997 MN PDFJohnОценок пока нет
- Data Compression SolutionДокумент11 страницData Compression SolutionMuktinath VishwakarmaОценок пока нет
- AF Repet ComLetter4Документ3 страницыAF Repet ComLetter4Hela Chamkhia Ep OmriОценок пока нет
- International Symposium On Molecular SpectrosДокумент181 страницаInternational Symposium On Molecular SpectrosDawit SeleshОценок пока нет
- Odoo Case StudyДокумент2 страницыOdoo Case StudyDawit SeleshОценок пока нет
- 06 Plishker GRC GrgpuДокумент25 страниц06 Plishker GRC GrgpuSravya ReddyОценок пока нет
- 06 Plishker GRC GrgpuДокумент25 страниц06 Plishker GRC GrgpuSravya ReddyОценок пока нет
- Basic GSM Frame StructureДокумент42 страницыBasic GSM Frame StructureDawit SeleshОценок пока нет
- Gsm-Efr 06.53Документ13 страницGsm-Efr 06.53Dawit SeleshОценок пока нет
- Distributed Sequences and Search ProcessДокумент5 страницDistributed Sequences and Search ProcessDawit SeleshОценок пока нет
- An Efficient Transcoding Algorithm For g.723.1 and G.729AДокумент15 страницAn Efficient Transcoding Algorithm For g.723.1 and G.729ADawit SeleshОценок пока нет
- Table of ContentДокумент2 страницыTable of ContentDawit SeleshОценок пока нет
- C++ Programming, Patterns & PracticesДокумент8 страницC++ Programming, Patterns & PracticesDawit SeleshОценок пока нет
- 01 Agile Challenge-Does Anyone Have A PencilДокумент13 страниц01 Agile Challenge-Does Anyone Have A PencilAbhisek MukherjeeОценок пока нет
- TOS 5 Unit 2b Design of Continuous One Way SlabДокумент9 страницTOS 5 Unit 2b Design of Continuous One Way SlabKshitija100% (1)
- Artikel Jurnal Siti Tsuwaibatul AДокумент11 страницArtikel Jurnal Siti Tsuwaibatul Aaslamiyah1024Оценок пока нет
- How To Query Asham Tele Points (Telebirr)Документ13 страницHow To Query Asham Tele Points (Telebirr)Fayisa ETОценок пока нет
- All I Need Is Love by Klaus Kinski 0394549163 PDFДокумент5 страницAll I Need Is Love by Klaus Kinski 0394549163 PDFFernanda ArzaguetОценок пока нет
- 09-Hispec DespecДокумент51 страница09-Hispec DespecHyungon KimОценок пока нет
- 0404 eДокумент80 страниц0404 eFrancisco MisleОценок пока нет
- Carnot Cycle and EngineДокумент18 страницCarnot Cycle and EngineXYZОценок пока нет
- Building Construction Costs Handbook 2019-2020Документ89 страницBuilding Construction Costs Handbook 2019-2020Rotich philipОценок пока нет
- Problem Set 1Документ2 страницыProblem Set 1Lovedeep SinghОценок пока нет
- ASN PyariViswamResumeДокумент3 страницыASN PyariViswamResumeapi-27019513100% (2)
- Paragraph Completion Material 1Документ5 страницParagraph Completion Material 1d.jyr2xОценок пока нет
- Course Syllabus Template For BSED 1Документ2 страницыCourse Syllabus Template For BSED 1Rosalyn MauricioОценок пока нет
- Real-World Data Is Dirty: Data Cleansing and The Merge/Purge ProblemДокумент29 страницReal-World Data Is Dirty: Data Cleansing and The Merge/Purge Problemapi-19731161Оценок пока нет
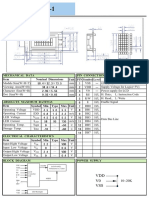
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemДокумент1 страницаV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriОценок пока нет
- Abu Khader Group ProposalДокумент5 страницAbu Khader Group ProposalChristine AghabiОценок пока нет
- Understanding The Self Lecture Lesson 1 Revised PDFДокумент41 страницаUnderstanding The Self Lecture Lesson 1 Revised PDFKylie CuadraОценок пока нет
- The Impact of Employees' Commitment Towards Food Safety at Ayana Resort, BaliДокумент58 страницThe Impact of Employees' Commitment Towards Food Safety at Ayana Resort, Balirachelle agathaОценок пока нет
- Vedic Astrology - Marriage Star Matching Compatibility For Pooraadam Girl and Aayilyam BoyДокумент1 страницаVedic Astrology - Marriage Star Matching Compatibility For Pooraadam Girl and Aayilyam BoyRam GopalОценок пока нет
- High Low MethodДокумент4 страницыHigh Low MethodSamreen LodhiОценок пока нет
- Aircraft Tyre Maintenance - SKYbrary Aviation SafetyДокумент8 страницAircraft Tyre Maintenance - SKYbrary Aviation Safetynosh1983Оценок пока нет
- Simulation and Analysis of 10 Gbps APD Receiver With Dispersion CompensationДокумент5 страницSimulation and Analysis of 10 Gbps APD Receiver With Dispersion CompensationMohd NafishОценок пока нет
- Final Model Paper Computer Science HSSC-IIДокумент9 страницFinal Model Paper Computer Science HSSC-IIMUhammad Milad AwanОценок пока нет
- EPAL TRW EPAL2 2edition Section2 Part2 GBДокумент45 страницEPAL TRW EPAL2 2edition Section2 Part2 GBGabriele AsnaghiОценок пока нет