Академический Документы
Профессиональный Документы
Культура Документы
Karine
Загружено:
Karine D'AssunçãoАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Karine
Загружено:
Karine D'AssunçãoАвторское право:
Доступные форматы
ALVARO NOGUEIRA
CONTROLE ROBUSTO H
DE SISTEMAS DISCRETOS SUJEITOS A
RESTRIES NO CONTROLE E NA SADA
CURITIBA
2009
ALVARO NOGUEIRA
CONTROLE ROBUSTO H
DE SISTEMAS DISCRETOS SUJEITOS A
RESTRIES NO CONTROLE E NA SADA
Dissertao apresentada ao Programa de Ps-
Graduao em Engenharia de Produo e
Sistemas da Pontifcia Universidade Catlica do
Paran como requisito parcial para o obteno
do ttulo de Mestre em Engenharia de Produo
e Sistemas.
Orientador:
Prof. Dr. Gustavo Henrique da Costa Oliveira
Co-orientador:
Prof. Dr. Humberto Xavier de Arajo
PONTIFCIA UNIVERSIDADE CATLICA DO PARAN - PUCPR
CURITIBA
2009
i
Aos meus pais e
minha amada Letcia.
ii
Agradecimentos
Gostaria de agradecer inicialmente meus pais pela oportunidade de realizar um trabalho
como este e por todo o apoio. A minha noiva Letcia, por sempre estar incentivando a seguir em
frente, e pelo carinho e compreenso durante a realizao desse trabalho. Ao meu orientador,
professor Dr. Gustavo Henrique da Costa Oliveira pelo apoio e incentivo. Ao meu co-
orientador, professor Dr. Humberto Xavier de Arajo, por ensinar e compartilhar todo o seu
conhecimento, pela conana e pacincia.
iii
A alegria e o amor so as duas grandes
asas para os grandes feitos.
J. W. von Goethe
iv
Resumo
Este trabalho aborda o problema de controle robusto H
para sistemas lineares sujeitos a
restries no controle e na sada, em tempo discreto. Deseja-se encontrar um controlador por
realimentao de sada, de ordem menor ou igual do sistema (reduzida ou completa), capaz de
tratar as incertezas paramtricas do processo do tipo politopo. A abordagem formulada para
resolver o problema baseia-se nos conceitos de estabilidade quadrtica e invarincia positiva.
denindo um conjunto elipsoidal positivamente (D,R)-invariante, gerado por uma funo de
Lyapunov quadrtica e contido na regio de linearidade do sistema. Assim, procura-se garantir
que a trajetria dos estados permanece no interior de um conjunto de estados admissveis,
respeitando as restries nos sinais de controle e sada. Para a sntese dos controladores, prope-
se um algoritmo hbrido baseado em Evoluo Diferencial (ED) e desigualdades matriciais
lineares (LMIs). O algoritmo de sntese validado com aplicaes em exemplos de simulao.
Palavras-chave: Controle H
, Controle Robusto, BMI, LMI, Restries, Evoluo
Diferencial
v
Abstract
This work deals with the H
robust control problem for linear systems subject to control
and output constraints in discrete time. A dynamic output feedback controller able to handle
with the parametric uncertainties of the system is considered. It can be of reduced or full order.
The approach formulated to solve the problem is based on the concept of quadratic stability and
positive invariance. An ellispoidal positively (D,R)-invariant set is dened, which is generated
by quadratic Lyapunov function, contained in the systems domain of linearity. This set ensures
the trajectory of the states in a set of admissible states, which complies with the control and
output restrictions. A hybrid algorithm based on Differential Evolution (DE) and linear matrix
inequalities (LMI) is proposed for solving this constrained robust control problem. Examples
are discussed to validate this approach.
Keywords: H
Control, Robust Control, BMI, LMI, Input and output constraints,
Differential Evolution
vi
Lista de Figuras
1 Sistema em malha fechada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2 Processo da Evoluo Diferencial. . . . . . . . . . . . . . . . . . . . . . . . . 30
3 Evoluo da norma H
ao longo das geraes . . . . . . . . . . . . . . . . . . 39
4 Sinais de Controle e Sada para o sistema denido por (A
1
, B
21
). . . . . . . . . 39
5 Sinais de Controle e Sada para o sistema denido por (A
2
, B
22
). . . . . . . . . 40
6 Sinais de Controle e Sada para o sistema denido por (A
1
, B
21
). . . . . . . . . 40
7 Sinais de Controle e Sada para o sistema denido por (A
2
, B
22
). . . . . . . . . 41
8 Sinais de Controle e Sada para o sistema denido por (A
1
, B
21
). . . . . . . . . 41
9 Sinais de Controle e Sada para o sistema denido por (A
2
, B
22
). . . . . . . . . 42
10 Sinais de Controle e Sada para o sistema denido por (A
1
, B
21
). . . . . . . . . 42
11 Sinais de Controle e Sada para o sistema denido por (A
2
, B
22
). . . . . . . . . 43
12 Evoluo da norma H
ao longo das geraes. . . . . . . . . . . . . . . . . . 46
13 Sinais de Controle e Sada no vrtice (A, B
21
). . . . . . . . . . . . . . . . . . . 46
14 Sinais de Controle e Sada no vrtice (A, B
22
). . . . . . . . . . . . . . . . . . . 47
15 Sinais de Controle e Sada no vrtice (A, B
21
). . . . . . . . . . . . . . . . . . . 47
16 Sinais de Controle e Sada no vrtice (A, B
22
). . . . . . . . . . . . . . . . . . . 48
17 Sinais de Controle e Sada no vrtice (A, B
21
). . . . . . . . . . . . . . . . . . . 48
18 Sinais de Controle e Sada no vrtice (A, B
22
). . . . . . . . . . . . . . . . . . . 49
19 Sinais de Controle e Sada no vrtice (A, B
21
). . . . . . . . . . . . . . . . . . . 49
20 Sinais de Controle e Sada no vrtice (A, B
22
). . . . . . . . . . . . . . . . . . . 50
vii
Lista de Tabelas
1 Estratgias da Evoluo Diferencial . . . . . . . . . . . . . . . . . . . . . . . 33
2 Resultado do limitante superior da norma H
para controladores de diferentes
dimenses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3 Resultado do limitante superior da norma H
para controladores de diferentes
dimenses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
viii
Lista de Abreviaturas
BMI - Desigualdade Matricial Bilinear (Bilinear Matrix Inequality)
CE - Computao Evolutiva
ED - Evoluo Diferencial
EAR - Equao Algbrica de Riccati
LTI - Linear Invariante no Tempo (Linear Time-Invariant)
LMI - Desigualdade Matricial Linear (Linear Matrix Inequality)
MIMO - Mltiplas Entradas, Mltiplas Sadas (Multiple Inputs, Multiple Outputs)
ix
Lista de Smbolos
R
n
Espao vetorial de nmeros reais com dimenso n
R
nm
Matrizes de nmeros reais com dimenso nm
Re(s) Parte real do nmero complexo s
Imag(s) Parte imaginria do nmero complexo s
sup Supremo de
0
nm
Matriz nula com dimenso nm
I
n
Matriz identidade com dimenso nn
G
1
Matriz inversa de G
G
T
Matriz transposta de G
diag(G
1
, G
2
) Matriz diagonal formada pelas matrizes G
1
, G
2
G
n
Norma n da matriz G
G() > 0 Matriz (semi)denida positiva, i.e.,
_
G R
nn
| u
T
Gu() > 0, u R
n
, u = 0
_
G() < 0 Matriz (semi)denida negativa, i.e.,
_
G R
nn
| u
T
Gu() < 0, u R
n
, u = 0
_
x
Lista de Publicaes
1. NOGUEIRA, A.; ARAJO, H. X.; OLIVEIRA, H. C. H
Robust Controller for Discrete-
Time Linear Systems Under Control and Output Constraints. 7th IEEE International
Conference on Control and Automation. Christchurch, Nova Zelndia, 2009.
xi
Sumrio
1 Introduo 1
1.1 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Proposta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Estrutura da Dissertao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Conceitos e Denies Preliminares 6
2.1 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Sistemas Incertos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.1 Modelo incerto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Desigualdades Matriciais Lineares - LMIs . . . . . . . . . . . . . . . . . . . . 8
2.3.1 Denio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3.2 Complemento de Schur . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3.3 S-procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4 Desigualdades Matriciais Bilineares - BMIs . . . . . . . . . . . . . . . . . . . 10
2.4.1 Denio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5 Estabilidade Quadrtica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.6 Invarincia Positiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6.1 Domnio de invarincia elipsoidal . . . . . . . . . . . . . . . . . . . . 12
2.6.2 D-invarincia positiva . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.7 Norma H
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.8 Bounded Real Lemma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Sumrio xii
3 Controle Robusto H
com Restries 16
3.1 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2 Controle H
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Problema de Controle Robusto H
com Restries . . . . . . . . . . . . . . . 19
3.4 Sntese de Controladores Robustos H
. . . . . . . . . . . . . . . . . . . . . . 22
4 Algoritmo de Sntese 29
4.1 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2 Evoluo Diferencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2.1 Inicializao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2.2 Mutao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.3 Recombinao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.4 Avaliao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2.5 Seleo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.3 Estratgias da Evoluo Diferencial . . . . . . . . . . . . . . . . . . . . . . . 32
4.4 Algoritmo Hbrido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.4.1 Algoritmo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.4.2 Inicializao do Controlador . . . . . . . . . . . . . . . . . . . . . . . 35
5 Resultados 37
5.1 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.2 Exemplo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.3 Exemplo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6 Concluso 51
Referncias 53
1
1 Introduo
1.1 Introduo
Durante as ltimas dcadas, a sntese de controladores robustos para sistemas lineares
vem sendo amplamente discutida pela comunidade cientca. Esses controladores possuem a
capacidade de assegurar o desempenho e a estabilidade do sistema frente s incertezas inerentes
ao modelo e, diferentemente da teoria de controle clssico, podem ser utilizados em sistemas
multivariveis, variantes no tempo e de ordem elevada.
A modelagem matemtica de um sistema dinmico pode resultar de um procedimento
baseado nas leis fsicas ou em tcnicas de identicao de sistemas ou ainda por ambos
os mtodos (Aguirre, 2000; Ljung, 1999). Ao se realizar a modelagem matemtica de um
determinado sistema, procura-se obter um modelo que represente o mais elmente possvel
seu comportamento dinmico, porm, devido a no linearidades ou incertezas de parmetros,
isto nem sempre possvel. Assim, obtm-se uma aproximao do modelo real do sistema,
permitindo com que o sistema seja abordado como um sistema incerto, no qual seus parmetros
podem assumir innitos valores dentro de um conjunto com limites conhecidos.
O grande avano no estudo de sistemas incertos deve-se ao estudo de estabilidade. Um
importante trabalho desenvolvido no estudo da estabilidade foi realizado por (Lyapunov, 1893),
o qual se tornou conhecido na dcada de 60 com o desenvolvimento do conceito de controle
moderno. O trabalho de Lyapunov analisa o comportamento de um sistema mecnico e se
baseia em funes que medem a energia do sistema, na qual a estabilidade est associada ao
fato do sistema dissipar energia ou no. Na dcada de 80, a teoria da estabilidade quadrtica
foi formulada, inicialmente publicada em (Hollot e Barmish, 1980) e posteriormente em
(Barmish, 1983, 1985). A estabilidade quadrtica pressupe a existncia de uma mesma
funo quadrtica de Lyapunov para todo o domnio de incerteza do problema, assegurando-
se assim a estabilidade do sistema. Deste modo, o sistema sujeito a incertezas denominado
quadraticamente estabilizvel se existe um controlador para o qual o sistema em malha fechada
quadraticamente estabilizvel.
1.1 Introduo 2
Ao se fazer a sntese de controladores, uma medida de desempenho deve ser escolhida como
crittrio de avaliao. A norma H
, descrita inicialmente em (Zames, 1981), um ndice de
desempenho frequentemente utilizado. Em (Doyle et al., 1989), equaes no espao de estado
so formuladas para a problema de controle H
por realimentao de sada, as quais se baseiam
nas equaes algbricas de Riccati (EAR). A motivao para a escolha desta norma como
crittrio de avaliao, assim como importantes resultados sobre o problema de controle H
por
realimentao de sada, podem ser encontrados em (Bernstein e Haddad, 1989; Khargonekar e
Rotea, 1991; Zhou et al., 1994; Doyle et al., 1994; Scherer, 1995).
Entretanto, formulaes do problema H
em termos de EAR podem se tornar difceis de
serem aplicadas aos problemas de controle robusto. Deste modo, muitas pesquisas nos ltimos
anos tmfocado no desenvolvimento de abordagens utilizando desigualdades matriciais lineares
(LMIs), por seu poder de tratabilidade computacional e usabilidade na resoluo de problemas
na teoria de sistemas de controle. As LMIs permitem que determinados problemas sejam
reduzidos a problemas de otimizao convexa. Em (Willems, 1971) foi introduzido o termo
LMI, e Willems refere-se equao de Riccati como um gargalo da teoria de sistemas lineares
e antev que, apesar da importncia da LMI parecer no ser apreciada naquela poca, seria
interessante explorar sua capacidade por meio de algoritmos computacionais. Em (Boyd et al.,
1994) foram apresentadas as diferentes caracterizaes de LMIs para a resoluo de problemas
de controle e identicados trs fatores que tornam as LMIs uma ferramenta importante:
a. existe uma grande variedade de especicaes de projetos e restries que pode ser
expressa como LMIs;
b. um problema formulado em termos de LMI pode ser resolvido de forma exata, atravs de
algoritmos ecientes de otimizao convexa;
c. a maioria dos problemas com mltiplas restries ou objetivos so frequentemente
tratveis na estrutura de LMI.
Muitos problemas de controle robusto passaram a ser formulados em termos de LMI, tais
como o problema de sntese de controladores robustos por realimentao de estado (Chilali e
Gahinet, 1996; Peaucelle et al., 2000; Ebihara e Hagiwara, 2002; Oliveira et al., 2002), e o
problema de sntese de controladores dinmicos de ordem completa para sistemas precisamente
conhecidos (Chilali e Gahinet, 1996; Scherer et al., 1997; Apkarian et al., 2001; Ebihara e
Hagiwara, 2004). A norma H
e os problemas de controladores H
tambm podem ser
caracterizados por LMIs, como por exemplo em (Gahinet, 1994; Gahinet e Apkarian, 1994;
Apkarian e Gahinet, 1995; Palhares et al., 1997; Xie et al., 2004).
1.1 Introduo 3
No entanto, um grupo de problemas de controle no possui formulaes convexas baseadas
em LMI. Um exemplo, o problema de sntese de controladores por realimentao de sada
esttica. Considervel esforo tem sido feito para desenvolver um procedimento eciente para
a sntese de controladores por realimentao de sada, como em (Sharav-Shapiro et al., 1998;
Crusius e Trono, 1999; Bing e Siying, 2001; Bara e Boutayeb, 2006; Rosinov et al., 2003;
Rosinov e Vesel, 2003). Porm, este continua sendo um problema em aberto. A maioria
das diculdades decorrem da no convexidade do problema de realimentao de sada, o qual
no representado em termos de LMIs, mas sim atravs de desigualdades matriciais bilineares
(BMI), introduzidas em (Goh et al., 1994, 1995; Safonov et al., 1994).
Diferentemente das LMIs, no so conhecidos algoritmos com tempo polinomial para
soluo de problemas BMIs. Problemas BMIs podem entretanto ser solucionados por diferentes
mtodos. Um exemplo xar umas das variveis desconhecidas, tornando o problema convexo,
e minimizar a outra varivel desconhecida, como em (Grigoriadis e Skelton, 1994). Outra
soluo usar mtodos globais, como o algoritmo branch-and-bound, apresentado em (Goh et
al., 1995). Assim, diferentes trabalhos tem sido desenvolvidos a m de solucionar os problemas
na rea de controle robusto na forma de BMIs, tais como (Beran e Boyd, 1997; Hassibi et al.,
1999; Tuan et al., 1999; Kanev et al., 2004; Lu et al., 2005).
Outra caracterstica importante dos sistemas fsicos que deve ser observada ao se projetar
um controlador so as restries nos sinais de controle e sada. Conforme (Reinelt, 2000a),
a maioria dos problemas em aplicaes prticas de controle ocorrem devido a existncia de
restries, como no controle e na sada, consequncia de limitaes fsicas e/ou no linearidades
inerentes ao sistema a ser controlado. Ao se ignorar estas restries, o desempenho do sistema
pode ser degradado ou at mesmo pode-se levar a instabilidade do sistema. Muitos trabalhos
foram publicados referentes ao estudo da estabilidade de sistemas lineares sujeitos s restries.
Dentre eles e dentro do contexto deste trabalho, existem duas abordagens principais: a saturao
de controladores e o comportamento no-linear do sistema, conforme vericado em (Gutman
et al., 1985; Vassilaki e Bitsoris, 1989; Castelan e Hennet, 1993; Castelan e Tarbouriech, 1994;
Tarbouriech e Burgat, 1994; Huang et al., 2002; Fang et al., 2003). No entanto, emnenhuma das
referncias citadas anteriormente foi levada em considerao as incertezas do modelo, ou seja,
a sntese de controladores robustos sujeitos a restries, que no ponto de vista prtico torna-
se interessante. Assim, nos trabalhos de (Sznaier e Damborg, 1987; Sznaier e Sideris, 1991;
Sznaier, 1992; Bitsoris e Gravalou, 1992; Milani, 1994; Hu et al., 1998; Bitsoris e Gravalou,
1999; Reinelt, 2000b; Silva et al., 2005; Abbas-Turki et al., 2005), o problema de controle
robusto com restries abordado.
1.2 Proposta 4
1.2 Proposta
Nesse contexto, este trabalho formular um problema de controle H
sujeito a incertezas e
restries no controle a sada, o qual resultar em um problema de otimizao multi-objetivo e
no convexo. Para solucionar este problema, a teoria da Computao Evolutiva (CE) pode ser
aplicada em conjunto com a formulao LMI. Utilizando-se os paradigmas da Computao
Evolutiva, dentre eles a Evoluo Diferencial (ED), possvel operar sobre um conjunto
de solues candidatas do problema, denominado populao, diferentemente dos mtodos
clssicos de otimizao. Os mtodos clssicos operam sobre uma nica soluo, necessitando
ser aplicado diversas vezes ao problema, para que seja possvel escolher uma dentre vrias
solues timas.
Uma das abordagens mais prximas desenvolvida neste trabalho descrita em (Langner,
2004; Arajo e Langner, 2005; Arajo et al., 2006). Nesses trabalhos, abordada a sntese de
controladores robustos H
2
e H
por realimentao de estado e sada para sistemas sujeitos a
restries no estado, no controle e na sada em tempo contnuo. Para solucionar o problema em
(Langner, 2004; Arajo e Langner, 2005), foi proposto um algoritmo hbrido, baseado em LMIs
e algoritmos genticos, e em (Arajo et al., 2006) foi proposto um algoritmo hbrido baseado
em LMIs e evoluo diferencial. O presente trabalho se caracteriza por tratar o problema no
contexto de sistemas em tempo discreto.
Assim, o presente trabalho tem como objetivo o desenvolvimento de uma soluo para o
problema de controle robusto H
por realimentao de sada dinmica, para sistemas lineares
sujeitos a incertezas e restries no controle e na sada em tempo discreto. A modelagem do
sistema ser realizada atravs de equaes no espao de estados, permitindo o tratamento de
processos com mltiplas entradas e mltiplas sadas (MIMO). A ordem do controlador a ser
sintetizado pode ser de ordem reduzida ou completa.
Para implementar o problema em questo, um algoritmo de sntese baseado nos conceitos
da Evoluo Diferencial (ED) e das desigualdades matriciais lineares (LMIs) ser apresentado.
Desta forma o problema poder ser tratado computacionalmente, permitindo o estudo comcasos
de exemplo retirados da literatura.
1.3 Estrutura da Dissertao
Este trabalho est dividido em seis captulos, que estaro organizados da seguinte maneira.
No captulo 2, so apresentadas algumas denies e conceitos preliminares, como por
1.3 Estrutura da Dissertao 5
exemplo, a descrio de sistemas incertos, LMIS e BMIs. No captulo 3, abordado o problema
de controle robusto H
com restries e ao nal apresentado o teorema desenvolvido que
permite a sntese desse controlador. No captulo 4, o conceito da Evoluo Diferencial (ED)
e as suas estratgias so abordados e, em seguida, o algoritmo desenvolvido para realizar a
sntese do controlador demonstrado. No captulo 5, so apresentados os resultados obtidos
em aplicaes em exemplos de simulao, utilizando o algoritmo de sntese para projetar o
controlador desejado. Finalmente, no captulo 6, so descritos os principais resultados, os
desaos enfrentados e algumas possveis continuaes deste trabalho.
6
2 Conceitos e Denies Preliminares
2.1 Introduo
Neste captulo so descritos alguns conceitos e denies preliminares necessrios para a
formulao do problema de controle robusto H
que ser tratado neste trabalho. Primeiramente,
na seo 2.2, descrito o conceito de sistemas incertos e a denio de incertezas paramtricas
do tipo politopo. Na seo 2.3, abordado o conceito, as caractersticas e as propriedades das
desigualdades matriciais lineares (LMIs). Na seo 2.4, descrito o conceito das desigualdades
matriciais bilineares (BMIs). Na seo 2.5, a denio de estabilidade quadrtica para sistemas
discretos apresentado. Na seo 2.6, apresentado o conceito de invarincia positiva. Na
seo 2.7, a norma H
descrita. Na seo 2.8, apresentado o bounded real lemma para
sistemas lineares em tempo discreto.
2.2 Sistemas Incertos
Ao tentar obter o modelo real do sistema, em muitos casos, estamos sujeitos a obter um
modelo aproximado do real. Neste modelo aproximado, algumas propriedades fsicas inerentes
ao sistema so ignoradas ou, conforme a complexidade matemtica do modelo, algumas
simplicaes so adotadas. Assim sendo, alguns dados do problema no so totalmente
conhecidos, podendo ser considerados como incertos.
As incertezas devem ser representadas explicitamente no modelo dos sistemas incertos.
Conforme (Oliveira, 1997), as incertezas podem ser representadas de duas maneiras:
estruturadas ou no estruturadas. As incertezas estruturadas so denidas por um espao de
pertinncia para os parmetros do modelo, na qual existe uma famlia de modelos que relaciona
a entrada e a sada da planta ao invs de um nico modelo. As incertezas no estruturadas esto
associadas s dinmicas no modeladas do modelo da planta.
2.2 Sistemas Incertos 7
2.2.1 Modelo incerto
Seja um sistema discreto, linear e invariante no tempo, sujeito a incertezas estruturadas
paramtricas, denido pela equao de estado
x(k +1) = A(r(k))x(k) +B
2
(s(k))u(k), (2.1)
onde x(k) R
n
o vetor de estado, u(k) R
m
o vetor de controle, A(r) R
nn
a matriz
dinmica do sistema, B
2
(s) R
nm
a matriz de controle, r R R
n
r
e s S R
n
s
, so
os vetores de parmetros incertos das matrizes dinmica e de controle, respectivamente. Os
conjuntos R e S so compactos e as funes r(k) : [0, ) R e s(k) : [0, ) R so
consideradas mensurveis no sentido de Lebesgue (Arajo, 1998).
As matrizes A(r(k)) e B
2
(s(k)) podem ser decompostas em torno do sistema
nominal(A, B
2
), quando este denido por
_
A(r(k)) = A+A(r(k))
B
2
(s(k)) = B
2
+B
2
(s(k))
, (2.2)
onde A(r(k)) e B
2
(s(k)) correspondem s matrizes de incertezas. Supe-se que o par (A, B
2
)
seja estabilizvel e constante.
A partir do modelo geral (2.1), adota-se a hiptese que as componentes dos vetores de
incerteza r(k) R e s(k) S pertencem a um intervalo fechado, e esto limitadas superior e
inferiormente como segue
r
i
r
i
r
i
, i = 1, 2,
, n
r
, (2.3)
s
j
s
j
s
j
, j = 1, 2,
, n
s
. (2.4)
Os domnios Re S, denidos por (2.3) e (2.4), so poliedros convexos comN=2
n
r
e M=2
n
s
vrtices, respectivamente.
Com a hiptese suplementar que os elementos das matrizes A(r(k)) e B
2
(s(k)) so funes
lineares de r(k) e s(k), as relaes de (2.3) e (2.4) denem tambm as matrizes vrtices A
i
e
B
2j
, i = 1, 2,
, N e j = 1, 2,
, M, associados aos vrtices dos poliedros R e S.
Assim, as matrizes A e B
2
pertencem aos domnios convexos fechados denidos por
D
A
=
_
A R
nn
; A =
N
i=1
i
A
i
,
N
i=1
i
= 1,
i
0
_
, (2.5)
2.3 Desigualdades Matriciais Lineares - LMIs 8
D
B
2
=
_
B
2
R
nm
; B
2
=
M
j=1
j
B
2 j
,
M
j=1
j
= 1,
j
0
_
. (2.6)
Com base nas denies (2.5) e (2.6), o sistema geral (2.1) pode ser descrito como
_
x(k +1) = Ax(k) +B
2
u(k)
A D
A
, B
2
D
B
2
. (2.7)
O modelo do sistema incerto, descrito neste captulo, portanto representado utilizando
incertezas estruturadas paramtricas do tipo politopo, onde o conjunto dos parmetros do
sistema um poliedro convexo e o sistema nominal localizado no centro deste poliedro.
2.3 Desigualdades Matriciais Lineares - LMIs
Nas ltimas dcadas, as desigualdades matriciais lineares (LMIs) obtiveram ateno
especial pela sua aplicao na teoria de controle. Muitos dos problemas que aparecem na
literatura sobre a teoria de controle podem ser reduzidos a problemas clssicos de otimizao
convexos ou quasi-convexos, sendo estes resolvidos por meio de LMIs.
Uma vez que o problema formulado em termos de LMIs, ele pode ser resolvido de forma
exata, atravs de algoritmos ecientes de otimizao convexa como, por exemplo, pelo LMI
Control Toolbox disponvel no software MATLAB. Alm de soluo numrica eciente, as
LMIs tambm possuem como principais caractersticas a robustez na descrio de problemas
com incertezas e a habilidade para considerar mltiplos requisitos de controle apenas anexando
LMIs adicionais.
A primeira aplicao das LMIs na anlise de sistemas dinmicos foi feita por (Lyapunov,
1893), em seus ensaios sobre a estabilidade dos movimentos, conhecido atualmente como teoria
de Lyapunov. No entanto, o termo LMI foi utilizado pela primeira vez para resoluo de
problemas de controle em (Willems, 1971).
2.3.1 Denio
Uma desigualdade matricial linear (LMI) uma inequao na forma
F(x) = F
0
+
m
i=1
x
i
F
i
> 0 , (2.8)
2.3 Desigualdades Matriciais Lineares - LMIs 9
onde x R
m
um vetor de escalares desconhecido (variveis de deciso ou otimizao) e
F
i
= F
T
i
R
nn
, i = 0,
, m, so matrizes simtricas conhecidas. Nota-se que as inequaes
F(x) < 0 e F(x) > G(x) so casos especiais da equao (2.8), pois elas podem ser reescritas
como F(x) > 0 e F(x) G(x) > 0, respectivamente.
A LMI (2.8) uma inequao convexa em x, tal que o conjunto F := {x : F(x) 0}
convexo. Assim, se x
1
e x
2
F e (0, 1) ento
F(x
1
+(1)x
2
) = F(x
1
) +(1)F(x
2
) > 0. (2.9)
Como mencionado anteriormente, uma das vantagens da representao de problemas de
controle atravs de LMIs a possibilidade de considerar mltiplos requisitos anexando LMIs
adicionais. Assim, seja um conjunto denido por n LMIs
F
1
(x) > 0; F
2
(x) > 0;
; F
n
(x) > 0. (2.10)
O conjunto apresentado em (2.10) pode ser reescrito por uma nica LMI
F(x) = diag(F
1
(x), F
2
(x),
, F
n
(x)) > 0. (2.11)
2.3.2 Complemento de Schur
O complemento de Schur converte um conjunto de inequaes no lineares convexas, que
aparecem regularmente nos problemas de controle, em LMI. Sejam as desigualdades matriciais
R(x) > 0, Q(x) S(x)R(x)
1
S(x)
T
> 0 (2.12)
ou, de forma equivalente,
Q(x) > 0, R(x) S(x)
T
Q(x)
1
S(x) > 0, (2.13)
onde Q(x) = Q(x)
T
, R(x) = R(x)
T
e S(x) so dependentes de x de forma am. O lema do
complemento de Schur converte este conjunto de inequaes no lineares convexas na LMI
equivalente
_
Q(x) S(x)
S(x)
T
R(x)
_
> 0. (2.14)
2.4 Desigualdades Matriciais Bilineares - BMIs 10
2.3.3 S-procedure
O S-procedure estende o uso das LMIs, permitindo que as condies no representadas por
desigualdades lineares, que normalmente aparecem na anlise de sistemas no lineares, possam
ser representadas como LMIs. A seguir, o S-procedure descrito utilizando funes quadrticas
(Boyd et al., 1994). Sejam F
0
,
, F
n
funes quadrticas na varivel x R
n
F
i
(x) = x
T
T
i
x +2u
T
i
x +
i
, i = 0,
, n, (2.15)
onde T
i
= T
T
i
. A existncia de
i
0,
,
n
0 tal que
F
0
(x)
n
i=1
i
F
i
(x) 0 (2.16)
implica que
F
0
(x) 0, x tal que F
i
(x) 0, i = 1,
, n. (2.17)
Nota-se que a equao (2.16) equivalente a
_
T
0
u
0
u
T
0
0
_
i=1
i
_
T
i
u
i
u
T
i
i
_
0. (2.18)
2.4 Desigualdades Matriciais Bilineares - BMIs
As desigualdades matriciais bilineares (BMIs) so uma extenso da abordagem das
desigualdades matriciais lineares (LMI). As BMIs se popularizaram nos trabalhos de (Safonov
et al., 1994), e sua primeira aplicao aparece em (VanAntwerp et al., 1997).
Os problemas formulados com BMIs so mais difceis de serem resolvidos que os
formulados com LMIs, pois as BMIs no so convexas, podem ter mltiplas solues locais
e so NP-hard, ou seja, no podem ser resolvidas em tempo polinomial no pior caso.
2.4.1 Denio
Uma desigualdade bilinear matricial (BMI) uma inequao na forma
F(x, y) = F
0
+
m
i=1
x
i
F
i
+
n
j=1
y
j
G
j
+
m
i=1
n
j=1
x
i
y
j
H
i j
> 0, (2.19)
onde x R
m
e y R
n
so vetores de escalares desconhecidos e F
i
= F
T
i
R
nn
, i = 0,
, m,
G
i
= G
T
i
R
nn
, j = 0,
, n, H
i j
= H
T
i j
R
nn
, i = 0,
, m j = 0,
, n, so matrizes conhecidas.
2.5 Estabilidade Quadrtica 11
Uma BMI uma LMI em x para um valor de y xo, e uma LMI em y para um valor de x
xo. Assim convexa em x e em y, separadamente. Como as BMIs descrevem conjuntos que
no so necessariamente convexos, elas podem descrever uma variedade maior de restries
que as LMIs, e podem ser utilizadas para representar muitos tipos de problemas de otimizao
e controle. A principal desvantagem das BMIs que elas so muito mais difceis de serem
manipuladas computacionalmente do que as LMIs.
2.5 Estabilidade Quadrtica
Ao se projetar um controlador para um determinado sistema, deseja-se que seja assegurada
a estabilidade do sistema em malha fechada, ou seja, todas as trajetrias do sistema devem
convergir para zero quando t . Uma condio suciente para isso a estabilidade
quadrtica.
O conceito de estabilidade quadrtica foi introduzido em (Hollot e Barmish, 1980; Barmish,
1985). L foram formuladas as condies necessrias e sucientes para a estabilidade
quadrtica de sistemas sujeitos a incertezas em tempo contnuo. No entanto, o mesmo conceito
vlido para sistemas sujeitos a incertezas em tempo discreto.
A estabilidade quadrtica consiste na existncia de uma funo quadrtica de Lyapunov
nica, independente dos parmetros incertos, que decresce ao longo de todas as trajetrias no
nulas do sistema. Assim, ser assegurado a estabilidade do sistema em malha fechada para todo
o domnio de incertezas admissveis.
Em(Leite et al., 2004) o conceito de estabilidade quadrtica aplicado aos sistemas sujeitos
a incertezas em tempo discreto, e esta caracterizada pela existncia de uma matriz P R
nn
,
simtrica e denida positiva, tal que
A
T
PAP < 0, (2.20)
A D
A
(2.5), B D
B
(2.6).
Vericando-se a equao (2.20), apenas os vrtices do conjunto D
A
(2.5) precisam ser
considerados para a anlise da estabilidade quadrtica. Assim sendo, um sistema sujeito a
incertezas do tipo politopo (2.7) quadraticamente estvel se e somente se existe uma matriz
P R
nn
, simtrica e denida positiva, tal que
A
T
i
PA
i
P < 0, i = 0, 1,
, N (2.21)
2.6 Invarincia Positiva 12
onde A
i
so os vrtices do domnio convexo D
A
(2.5).
2.6 Invarincia Positiva
O conceito de invarincia positiva (Arajo, 1998) utilizado na sntese de controladores de
sistemas dinmicos sujeitos a restries, pois procura garantir a manuteno das trajetrias dos
estados de um sistema controlado no interior de alguns conjuntos de estados admissveis.
Seja o sistema discreto autnomo descrito por:
x(k +1) = A(r(k))x(k), r(k), (2.22)
onde A(.) uma funo contnua e r(k) R (2.3) o vetor de parmetros incertos que satisfaz
as hipteses que asseguram a existncia e a unidade das solues da equao (2.22).
Denio 2.6.1. Um conjunto no vazio R
n
positivamente invariante para o sistema
(2.22) se
x(k
0
) , (2.23)
onde A(r(k))x(k) e r(k) R (2.3), as trajetrias do sistema x(k) , k k
0
.
Uma outra denio importante a de um conjunto positivamente invariante e
assintoticamente estvel.
Denio 2.6.2. Seja R
n
um conjunto no vazio, contendo o ponto de equilbrio x = 0.
um conjunto positivamente invariante e assintoticamente estvel para o sistema (2.22) se
x(k) , (2.24)
onde A(r(k))x(k) e r(k) R (2.3), as trajetrias x(k; x(k
0
)) 0 quando k .
2.6.1 Domnio de invarincia elipsoidal
Nesta seo, restringe-se a anlise de domnios de invarincia positiva elipsoidais.
A determinao desses domnios pode ser baseada em funes de Lyapunov quadrticas
associadas ao sistema considerado.
Proposio 2.6.1. Seja v(x) = x
T
Px, P = P
T
R
nn
, P > 0, uma funo de Lyapunov
quadrtica para o sistema (2.22), denindo o domnio elipsoidal como:
={x R
n
: v(x) c, c > 0} (2.25)
2.6 Invarincia Positiva 13
um domnio positivamente invariante e assintoticamente estvel (estvel) para o sistema
(2.22) se v(x(k)) = v(x(k +1)) v(x(k)) < 0 (v(x(k)) 0), x(k) .
Assim, uma condio suciente relativa invarincia positiva do conjunto enunciada
no caso de sistemas autnomos sujeitos a incertezas do tipo politopo.
Seja o sistema discreto autnomo:
_
x(k +1) = Ax(k)
A D
A
.
(2.26)
Proposio 2.6.2. O conjunto elipsoidal denido por (2.25) positivamente invariante para
o sistema (2.26) se a matriz P satisfaz as seguintes LMIs:
A
T
i
PA
i
P 0, i = 1, 2, . . . , N. (2.27)
Esta proposio uma consequncia direta do conceito da estabilidade quadrtica (2.20) e
da proposio 2.6.1 aplicada aos sistemas discretos sujeitos a incertezas politpicas. Nota-se
que a desigualdade estrita da LMI (2.27) assegura a estabilidade assinttica do domnio para
o sistema (2.26).
2.6.2 D-invarincia positiva
A D-invarincia positiva uma ferramenta que se mostra interessante no estudo da
estabilizao de sistemas no autnomos sujeitos a restries de controle ou de sada.
Seja um sistema discreto no autnomo descrito por:
_
x(k +1) = Ax(k) +B
1
w(k)
w(k) D,
(2.28)
onde w(k) R
d
o vetor de perturabao. O conjunto D fechado e convexo, contendo w = 0.
Denio 2.6.3. Um conjunto no vazio R
n
positivamente D-invariante para o sistema
(2.28) se
x
0
, (2.29)
ento
x(k; x(k
0
); w) , w(k) D, k k
0
. (2.30)
Assim, o domnio positivamente D-invariante para o sistema (2.28) se todas as
2.7 Norma H
14
trajetrias x(k; x(k
0
); w) inicilizadas neste domnio l permaneam, qualquer que seja a
perturbao w(k).
2.7 Norma H
A norma H
denida como:
H
= sup
max
[H(z)]. (2.31)
onde sup
max
o valor singular mximo da resposta em frequncia do sistema H(z).
Em sistemas lineares invariantes no tempo (LTI) estveis, a norma H
utilizada para
avaliar o desempenho atravs da funo de transferncia desses sistemas. Seja o sistema linear
invariante no tempo S descrito pelas equaes de estado
S:
_
x(k +1) = Ax(k) +Bu(k)
y(k) =Cx(k) +Du(k)
, (2.32)
onde x(k) R
n
o vetor de estado, u(k) R
m
o vetor de controle e y(k) R
p
o vetor
de sada medida. Por hiptese, assume-se que S seja assintoticamente estvel, ou seja, todos os
plos (
i
) da matriz de transferncia A pertencem a uma circunferncia de raio unitrio (
i
<1).
Seja H(z) a funo de transferncia do sistema S entre a sada y e a entrada u,
H(z) =C(zI A)
1
B+D. (2.33)
A norma H
da funo de transferncia denida como
H(z)
= sup
uR
max
[H(z)]. (2.34)
Assim, a norma H
da funo de transferncia de um sistema corresponde a medida do
pior caso no ganho do sistema.
2.8 Bounded Real Lemma
Seja o sistema linear invariante no tempo S, controlvel, descrito pelas equaes de estado
S:
_
x(k +1) = Ax(k) +Bu(k)
y(k) =Cx(k) +Du(k)
, (2.35)
2.8 Bounded Real Lemma 15
Seja H(z) a funo de transferncia entre a sada y e a entrada u,
H(z) =C(zI A)
1
B+D. (2.36)
Ento, as seguintes armaes so equivalentes (Gahinet e Apkarian, 1994):
a. A estvel e
C(zI A)
1
B+D
< 1; (2.37)
b. Existe uma matriz simtrica P = P
T
> 0 tal que
_
_
A
T
PAP A
T
PB C
T
B
T
PA B
T
PBI D
T
C D I
_
_
< 0; (2.38)
c. Existe uma matriz simtrica P = P
T
> 0 tal que
_
_
P
1
A B 0
A
T
P 0 C
T
B
T
0 I D
T
0 C D I
_
_
< 0. (2.39)
Os conceitos e denies apresentados neste captulo sero utilizados para formular o
problema a ser abordado neste trabalho e auxiliaro na sntese do controlador. No prximo
captulo ser apresentado o problema de controle robusto H
de sistemas discretos sujeitos a
restries no controle e na sada e o teorema formulado para solucionar este problema.
16
3 Controle Robusto H
com Restries
3.1 Introduo
Neste captulo formulado o problema de controle robusto H
com restries e
apresentado os principais resultados deste trabalho, que permitem a sntese do controlador.
Na seo 3.2, o controle H
descrito. Na seo 3.3, o problema de controle robusto H
de sistemas discretos sujeitos a restries no controle e na sada apresentado. Na seo 3.4,
algumas condies so determinadas a m de garantir que as restries no controle e na sada
sejam satisfeitas, e assegurar a estabilidade e o desempenho do sistema em termos da norma
H
.
3.2 Controle H
O problema de controle H
e sua ligao com robustez foi introduzido por (Zames, 1981),
originalmente no domnio da frequncia, para tratar dos casos de robustez em que os mtodos
de controle lineares quadrtico, prevalecentes no domnio do tempo, no atendiam. Porm,
no incio da dcada de 90, com a soluo no espao de estado, os controladores timos H
passaram a se apresentar de forma mais simples.
O problema de controle H
com realimentao de sada para sistemas lineares, utilizando
um compensador dinmico apresentado a seguir.
Seja o sistema linear invariante no tempo S, descrito pelas equaes de estado
S:
_
_
x(k +1) = Ax(k) +B
1
w(k) +B
2
u(k),
y(k) =C
y
x(k),
z(k) =C
1
x(k) +D
11
w(k) +D
12
u(k),
(3.1)
onde x(k) R
n
o vetor de estados, u(k) R
m
, o vetor de controle, w(k) R
l
, o vetor de
perturbao externa, y(k) R
p
, o vetor de sada medida e z(k) R
q
, o vetor de sada controlada.
3.2 Controle H
17
Assume-se que C
y
seja uma matriz conhecida de posto completo.
Seja um controlador dinmico K denido por:
K:
_
(k +1) = A
k
(k) +B
k
e(k),
u(k) =C
k
(k) +D
k
e(k),
(3.2)
onde (k) R
n
c
, com (0) = 0, o vetor de estado do controlador, e(k) R
p
, o vetor erro
(e(k) =r(k)y(k)), r(k) R
p
, o vetor referncia, e A
k
, B
k
, C
k
e D
k
so matrizes desconhecidas
e de dimenses apropriadas.
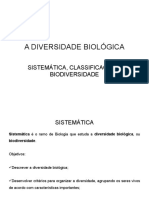
O sistema em malha fechada est representado no diagrama da Figura 1.
Figura 1: Sistema em malha fechada.
O sistema em malha fechada resultante da combinao das equaes (3.1) e (3.2) descrito
por:
_
_
_
x(k +1)
(k +1)
_
=
_
AB
2
D
k
C
y
B
2
C
k
B
k
C
y
A
k
__
x(k)
(k)
_
+
_
B
1
0
n
c
1
_
w(k) +
_
B
2
D
k
B
k
_
r(k)
z(k) =
_
C
1
D
12
D
k
C
y
D
12
C
k
_
_
x(k)
(k)
_
+[D
11
]w(k) +[D
12
D
k
]r(k)
.
(3.3)
Denindo-se as matrizes do sistema em malha fechada como
A =
_
A 0
0 0
n
c
_
, B
1
=
_
B
1
0
n
c
1
_
, B
2
=
_
B
2
0
0 I
n
c
_
,
C
y
=
_
C
y
0
0 I
n
c
_
, C
1
=
_
C
1
0
qn
c
_
, D
12
=
_
D
12
0
qn
c
_
, (3.4)
1
=
_
I
p
0
n
c
p
_
,
2
=
_
I
m
0
n
c
m
_
,
3.2 Controle H
18
L
K
=
_
D
k
C
k
B
k
A
k
_
, (3.5)
e rearrajando-se os termos nas equaes (3.3), obtm-se:
_
_
x
f
(k +1) = (A+B
2
L
K
C
y
)x
f
(k) +B
1
w(k) +B
2
L
K
1
r(k),
y(k) =
T
1
C
y
x
f
(k),
z(k) = (C
1
+D
12
L
K
C
y
)x
f
(k) +D
11
w(k) +D
12
L
K
1
r(k),
(3.6)
onde x
f
(k) denido por
x
f
(k) =
_
x(k)
(k)
_
. (3.7)
Seja H
f
(z) a funo de transferncia do sistema em malha fechada entre a perturbao w e
a sada z:
H
f
(z) =C
1 f
(zI A
f
)
1
B
1f
+D
11 f
, (3.8)
onde
A
f
= A+B
2
L
K
C
y
,
B
1f
= B
1
, (3.9)
C
1f
=C
1
+D
12
L
K
C
y
,
D
11 f
= D
11
.
Assim, com a norma H
de H
f
(z) dada pela equao (2.31), pode-se denir o seguinte
problema de controle timo H
:
Encontrar um controlador dinmico L
K
, tal que a funo de transferncia H
f
(z) seja
estvel e possua norma H
f
(z)
mnima.
No entanto, encontrar um controlador timo H
numericamente e teoricamente
complicado (Doyle et al., 1989). Desta forma, um problema de otimizao que aproxima-se
da soluo tima denido como um problema de controle H
sub-timo, descrito por:
Dado um > 0, encontrar um controlador estabilizante, se este existe, tal que H
f
(z)
<
.
As solues desse problema, se existirem, so chamadas de controladores gamma-sub-
timo. Isto , pode-se calcular o menor limite superior para a norma H
f
(z)
pela
minimizao de . Utilizando-se a relao existente entre a norma H
do sistema e o Bounded
Real Lemma, apresentada na seo 2.8, para um sistema em malha fechada discreto no tempo
3.3 Problema de Controle Robusto H
com Restries 19
(3.6) assintoticamente estvel, H
f
(z)
se e somente se existe uma matriz simtrica
denida positiva P R
nn
tal que
_
_
P PA
f
PB
1 f
0
A
T
f
P P 0 C
T
1f
B
T
1f
P 0 I D
T
11f
0 C
1f
D
11f
I
_
_
< 0, (3.10)
Com isso, o problema de controle H
sub-timo, para sistemas com realimentao de
sada dinmica, equivalente a encontrar um controlador dinmico L
K
(3.5) estabilizante e
uma matriz P soluo do seguinte problema de otimizao:
min
P,L
K
(3.11)
sujeito a
_
_
P PA
f
PB
1 f
0
A
T
f
P P 0 C
T
1f
B
T
1f
P 0 I D
T
11f
0 C
1f
D
11f
I
_
_
< 0. (3.12)
3.3 Problema de Controle Robusto H
com Restries
Seja S o sistema linear invariante discreto no tempo, sujeito a incertezas paramtricas do
tipo politopo, descrito pelas equaes de estado:
S:
_
_
x(k +1) = Ax(k) +B
1
w(k) +B
2
u(k),
y(k) =C
y
x(k),
z(k) =C
1
x(k) +D
11
w(k) +D
12
u(k),
(3.13)
onde x(k) R
n
o vetor de estados, u(k) R
m
, o vetor de controle, w(k) R
l
, o vetor de
perturbao externa, y(k) R
p
, o vetor de sada medida, e z(k) R
q
, o vetor de sada controlada.
Supe-se que C
y
tenha posto completo e todas as matrizes sejam reais e com dimenses
apropriadas. As matrizes A e B
2
pertencem aos conjuntos convexos limitados denidos em
(2.5) e (2.6), respectivamente:
D
A
=
_
A R
nn
; A =
N
i=1
i
A
i
,
N
i=1
i
= 1,
i
0
_
, (3.14)
3.3 Problema de Controle Robusto H
com Restries 20
D
B
2
=
_
B
2
R
nm
; B
2
=
M
j=1
j
B
2 j
,
M
j=1
j
= 1,
j
0
_
. (3.15)
Supe-se tambm que os pares (A, B
2
) sejam estabilizveis e os pares (C
y
, A) sejam
detectveis em todo o domnio de incerteza. Supe-se ainda que o sistema (3.13) esteja sujeito
as seguintes restries:
a. o vetor de controle u(k) pertence ao conjunto poliedral
D
=
_
u R
m
: h
T
i
u
i
,
i
> 0
_
, (3.16)
onde h
i
R
m
, h
i
= 0, i = 1, 2,
, n
h
;
b. o vetor de sada y(k) pertence ao conjunto poliedral
D
=
_
y R
p
:
T
i
y
i
,
i
> 0
_
, (3.17)
onde
i
R
p
,
i
= 0, i = 1, 2,
, n
n
.
O vetor de perturbao w(k) limitado em norma, tendo em vista as restries no domnio
do tempo apresentadas anteriormente, e pertence ao conjunto convexo
D(w
0
) =
_
w R
l
: w w
0
, w
0
> 0
_
. (3.18)
Este conjunto dene uma hiperesfera de raio w
0
.
Considera-se que um vetor de referncia r(k) pertence ao conjunto limitado por
R =
_
r R
p
: r
T
R
1
r 1, R = R
T
R
pp
, R > 0
_
. (3.19)
O controlador por realimentao de sada dinmica a ser projetado denido por (3.2), com
L
K
=
_
D
k
C
k
B
k
A
k
_
R
(m+n
c
)(p+n
c
)
. (3.20)
O sistema em malha fechada dado por:
_
_
x
f
(k +1) = A
f
x
f
(k) +B
1f
w(k) +B
2f
r(k),
y(k) =C
y f
x
f
(k),
z(k) = (C
1f
x
f
(k) +D
11f
w(k) +D
12 f
r(k),
(3.21)
3.3 Problema de Controle Robusto H
com Restries 21
onde
A
f
= A+B
2
L
K
C
y
, B
1f
= B
1
, B
2f
= B
2
L
K
1
,
C
y f
=
T
1
C
y
, C
1f
=C
1
+D
12
L
K
C
y
, (3.22)
D
11f
= D
11
, D
12 f
= D
12
L
K
1
,
com A D
A
e B
2
D
B
2
.
Utilizando-se a equao (3.20), o sinal de controle u(k) pode ser descrito por
u(k) =
T
2
L
K
C
y
x
f
(k) +
T
2
L
K
1
r(k). (3.23)
A partir das restries (3.16) e (3.17), denem-se os conjuntos D
e D
, para o sistema em
malha fechada, com:
D
=
_
x
f
: h
T
i
T
2
L
K
C
y
x
f
(k) +h
T
i
T
2
L
K
1
r(k)
i
,
i
> 0, i = 1,
, n
h
_
, (3.24)
D
=
_
x
f
:
T
i
T
1
C
y
x
f
(k)
i
,
i
> 0, i = 1,
, n
n
_
. (3.25)
Os conjuntos D
e D
so as regies no espao de estado para as quais os sinais de controle
e de sada do sistema, respectivamente, no saturam. Portanto, a partir das equaes (3.24) e
(3.25), importante notar que o sistema de malha fechada resultante vlido somente para os
estados x
f
pertencentes a
D
. (3.26)
A funo de transferncia H
f
(z) entre a sada controlada z e a perturbao w igual a
H
f
(z) =C
1f
(zI A
f
)
1
B
1f
+D
11f
(3.27)
com A D
A
e B
2
D
B
2
.
Assim, o problema de controle robusto H
de sistemas discretos sujeitos a restries no
controle e na sada pode ser formulado como segue:
Problema 1. Encontrar um controlador estvel por realimentao de sada dinmica
L
K
R
(m+n
c
)(p+n
c
)
, (3.28)
de ordem xa n
c
e um escalar positivo , tais que as seguintes condies sejam satisfeitas:
a. L
K
= arg min
_
: H
f
(s)
_
;
b. as restries (3.16) e (3.17) sejam respeitadas pelas trajetrias do sistema em malha
3.4 Sntese de Controladores Robustos H
22
fechada (3.6), para quaisquer que sejam a perturbao w(k) D(w
0
) e a entrada de
referncia r(k) R.
3.4 Sntese de Controladores Robustos H
Nesta seo so descritos os lemas que esto associados as restries de controle e de
sada, denidas em (3.16) e (3.17), e o lema associado ao conceito de invarincia Para
o desenvolvimento dos resultados deste trabalho, a denio apresentada a seguir se faz
necessria (Arajo et al., 2006).
Denio 3.4.1. Sejam D e R conjuntos compactos e um conjunto no vazio. um
conjunto positivamente (D,R)-invariante em relao ao sistema (3.1) se para todo estado
inicial x
f
(k
0
) e toda perturbao w(k) D, x
f
(k) , k k
0
e r(k) R.
Partindo-se do pressuposto que os domnios de invarincia positiva podem ser gerados a
partir de funes de Lyapunov quadrticas associadas aos sistemas estveis, conforme discutido
na seo 2.6, os domnios positivamente invariantes elipsoidais obtidos a partir das funes de
Lyapunov do tipo v(x) = x
T
Px, com P = P
T
> 0, sero utilizados para solucionar o problema
de sntese de controladores H
.
Seja o conjunto elipsoidal , centrado na origem, denido por
=
_
x
f
R
n+n
c
: x
T
f
Px
f
1, P = P
T
> 0
_
, (3.29)
onde P R
nn
.
Denindo-se L como o conjunto de todos os controladores L
K
R
(m+n
c
)(p+n
c
)
tais que
A
f
seja assintoticamente estvel, A D
A
e B
2
D
B
2
, o seguinte resultado pode ser obtido a
partir da denio 3.4.1.
Proposio 3.4.1. O controlador por realimentao de sada dinmica L
K
uma soluo do
problema de controle robusto H
para sistemas sujeitos a restries, no controle e na sada,
em tempo discreto, se e somente se
L
K
= arg min
_
: H
f
(z)
, L
K
L
_
(3.30)
e existe um conjunto qualquer R
n+n
c
positivamente (D,R)-invariante em relao ao
sistema (3.6) tal que
D
. (3.31)
3.4 Sntese de Controladores Robustos H
23
Alguns lemas preliminares sero apresentados a seguir, os quais auxiliam na obteno
de uma soluo para o Problema 1. Supe-se que a matriz desconhecida D
k
seja nula. No
lema 3.4.1, apresentado uma condio suciente para que a restrio de controle (3.16) seja
respeitada, ou seja, D
.
Lema 3.4.1. O elipside denido por (3.29) est contido no poliedro D
(3.24), para um
dado controlador L
K
, com P R
nn
, se e somente se
_
2
i
h
T
i
T
2
L
K
C
y
C
T
y
L
T
K
2
h
i
P
_
0, i = 1, 2, . . . , n
h
. (3.32)
Demonstrao: A partir das inequaes (3.24), uma funo suporte do elipside pode ser
escrita como
c
(h
i
, L
k
) = max
x
f
h
T
i
T
2
L
K
C
y
x
f
. (3.33)
O Lagrangeano do problema de maximizao descrito por:
L(x
f
, ) = h
T
i
T
2
L
K
C
y
x
f
+(x
T
f
Px
f
1), (3.34)
onde R o multiplicador de Lagrange. Assim, as condies necessrias e sucientes de
otimalidade so dadas por:
L
= x
T
f
Px
f
1 = 0,
L
x
=C
T
y
L
T
K
2
h
i
+2Px
f
= 0. (3.35)
Obtem-se assim
x
f
=
P
1
C
T
y
L
T
K
2
h
i
2
, (3.36)
=
_
h
T
i
T
2
L
K
C
y
P
1
C
T
y
L
T
K
2
h
i
2
. (3.37)
Assim, conclui-se que a soluo tima dada por
c
(h
i
, L
K
) =
_
h
T
i
T
2
L
K
C
y
P
1
C
T
y
L
T
K
2
h
i
. (3.38)
Consequentemente, o elipside est contido emD
, se e somente se
c
(h
i
, LK)
i
, i =
1, 2, . . . , n
h
, o que equivalente a
_
h
T
i
T
2
L
K
C
y
P
1
C
T
y
L
T
K
2
h
i
i
, i = 1, 2, . . . , n
h
. (3.39)
3.4 Sntese de Controladores Robustos H
24
As inequaes (3.39) podem ser escritas como
2
i
h
T
i
T
2
L
K
C
y
P
1
C
T
y
L
T
K
2
h
i
0, i = 1, 2, . . . , n
h
. (3.40)
Utilizando-se o complemento de Schur em (3.40), so obtidas as seguintes LMIs:
_
2
i
h
T
i
T
2
L
K
C
y
C
T
y
L
T
K
2
h
i
P
_
0, i = 1, 2, . . . , n
h
. (3.41)
No lema 3.4.2, apresentada uma condio suciente para que a restrio de sada (3.17)
seja satisfeita, ou seja, D
.
Lema 3.4.2. O elipside denido por (3.29) est contido no poliedro D
(3.25), para um
dado controlador L
K
, com P R
nn
, se e somente se
_
2
i
T
i
T
1
C
y
C
T
y
i
P
_
0, i = 1, 2, . . . , n
n
(3.42)
.
Demonstrao: A partir das inequaes (3.25), uma funo suporte do elipside pode ser
escrita como
s
(
i
) = max
x
f
T
i
T
1
C
y
x
f
. (3.43)
O Lagrangeano do problema de maximizao descrito por
L(x
f
, ) =
T
i
T
1
C
y
x
f
+(x
T
f
Px
f
1), (3.44)
onde R o multiplicador de Lagrange. Assim, as condies necessrias e sucientes de
otimalidade so dadas por
L
= x
T
f
Px
f
1 = 0,
L
x
=C
T
y
i
+2Px
f
= 0. (3.45)
Obtm-se assim
x
f
=
P
1
C
T
y
i
2
, (3.46)
=
_
T
i
T
1
C
y
P
1
C
T
y
i
2
. (3.47)
3.4 Sntese de Controladores Robustos H
25
Portanto, na soluo tima tm-se
s
(
i
) =
_
T
i
T
1
C
y
P
1
C
T
y
i
. (3.48)
Consequentemente, o elipside est contido em D
, se e somente se
s
(
i
)
i
, i =
1, 2, . . . , n
n
, o que equivale a
_
T
i
T
1
C
y
P
1
C
T
y
i
, 1, 2, . . . , n
n
. (3.49)
As inequaes (3.49) podem ser escritas como
T
i
T
1
C
y
P
1
C
T
y
2
i
, i = 1, 2, . . . , n
n
. (3.50)
Utilizando-se o complemento de Schur em (3.50), so obtidas as seguintes LMIs:
_
2
i
T
i
T
1
C
y
C
T
y
i
P
_
0, i = 1, 2, . . . , n
n
. (3.51)
O prximo lema apresenta uma condio suciente assegurando a (D,R)-invarincia
positiva de um conjunto elipsoidal para as trajetrias do sistema de malha fechada, sem
levar em considerao as restries no controle e na sada.
Lema 3.4.3. Sejam o conjunto gerado por uma matriz simtrica denida positiva P R
nn
,
denido por(3.29), e o sistema incerto (3.3). Se existir uma matriz P R
nn
e escalares
k
0,
k
0, k = 1, 2, . . . , NM, tais que o conjunto de desigualdades
_
_
A
T
f
PA
f
P+
k
P A
T
f
PB
T
1f
A
T
f
PB
T
2f
B
T
1f
PA
f
B
T
1 f
PB
1 f
k
I B
T
1 f
PB
2f
B
T
2f
PA
f
B
T
2f
PB
1f
B
T
2 f
PB
2 f
(
k
k
w
2
0
)R
1
_
_
0, (3.52)
para cada vrtice (A
i
, B
2j
) do conjunto D
A
D
B
2
, ento um conjunto (D,R)-invariante
para o sistema de malha fechada e L
K
um controlador robusto que estabiliza o sistema (3.1).
Demonstrao: seja v(x
f
) =x
T
f
Px
f
uma funo de Lyapunov quadrtica, associada ao sistema
de malha fechada (3.3). Aequao a diferenas de v(x
f
) ao longo das trajetrias do sistema (3.3)
3.4 Sntese de Controladores Robustos H
26
dada por
v(x
f
(k +1)) v(x
f
(k)) = x
T
f
(A
T
f
PA
f
P)x
f
+x
T
f
A
T
f
PB
1f
w+x
T
f
A
T
f
PB
2f
r
+w
T
B
T
1f
PA
f
x
f
+w
T
B
T
1f
PB
1f
w+w
T
B
T
1f
PB
2f
r
+r
T
B
T
2f
PA
f
x
f
+r
T
B
T
2f
PB
1f
w+r
T
B
T
2f
PB
2f
r.
(3.53)
Para simplicar notao, sumprimiu-se o tempo k nas equaes.
Para que seja um conjunto positivamente (D,R)-invariante para o sistema com incertezas
(3.3), suciente que v(x
f
(k +1)) v(x
f
(k)) 0, qualquer que seja o vetor x
f
pertencente
fronteira de , isto , x
T
f
Px
f
= 1, e para toda perturbao admissvel w D(w
0
) e referncia
r R. Assim, um conjunto positivamente (D,R)-invariante para o sistema (3.3) se
x
T
f
(A
T
f
PA
f
P)x
f
+x
T
f
A
T
f
PB
1f
w+x
T
f
A
T
f
PB
2f
r +w
T
B
T
1f
PA
f
x
f
+w
T
B
T
1f
PB
1f
w
+w
T
B
T
1 f
PB
2 f
r +r
T
B
T
2f
PA
f
x
f
+r
T
B
T
2f
PB
1f
w+r
T
B
T
2f
PB
2f
r 0,
(3.54)
para um ponto qualquer (x
f
, w, r) tal que x
T
f
Px
f
1, w
T
w w
2
0
e r
T
R
1
r 1.
Utilizando o S-procedure, apresentado na seo 2.3.3, esta condio pode ser reescrita sem
restries:
Se existem escalares
k
0,
k
0 e
k
0 tais que
x
T
f
(A
T
f
PA
f
P)x
f
+x
T
f
A
T
f
PB
1f
w+x
T
f
A
T
f
PB
2f
r +w
T
B
T
1f
PA
f
x
f
+w
T
B
T
1f
PB
1f
w
+w
T
B
T
1f
PB
2f
r +r
T
B
T
2 f
PA
f
x
f
+r
T
B
T
2f
PB
1f
w+r
T
B
T
2f
PB
2f
r
+
k
(x
T
f
Px
f
1) +
k
(w
2
0
w
T
w) +
k
(1r
T
R
1
r) 0,
(3.55)
x
f
R
n
, w R
l
e r R, entao um conjunto positivamente (D,R)-invariante para o
sistema (3.3). Neste caso, este procedimento assegura somente a sucincia da nova condio.
A desigualdade (3.55) pode ser reescrita como
_
_
x
f
w
r
_
_
T
_
_
A
T
f
PA
f
P+
k
P A
T
f
PB
1 f
A
T
f
PB
2f
B
T
1f
PA
f
B
T
1f
PB
1f
k
I B
T
1f
PB
2f
B
T
2f
PA
f
B
T
2f
PB
1 f
B
T
2f
PB
2f
k
R
1
_
_
_
_
x
f
w
r
_
_
+ (3.56)
k
+
k
w
2
0
+
k
0.
Na desigualdade (3.56) observa-se que x
f
, w e r podem assumir quaisquer valores em seus
respectivos espaos, o que implica na necessidade da condio
k
+
k
w
2
0
+
k
0. (3.57)
3.4 Sntese de Controladores Robustos H
27
Assim, a desigualdade (3.57) pode ainda ser escrita como
_
_
A
T
f
PA
f
P+
k
P A
T
f
PB
1f
A
T
f
PB
2f
0
B
T
1f
PA
f
B
T
1f
PB
1f
k
I B
T
1f
PB
2f
0
B
T
2f
PA
f
B
T
2 f
PB
1 f
B
T
2f
PB
2f
k
R
1
0
0 0 0
k
+
k
w
2
0
+
k
_
_
0. (3.58)
Alm disso, se a desigualdade (3.58) for satisfeita para uma combinao (
k
,
k
,
k
), ento
ela tambm satisfeita para qualquer
k
tal que
k
k
k
k
w
2
0
. (3.59)
Assim, sem perda de generalidade, escolhe-se
k
=
k
k
w
2
0
, (3.60)
obtendo-se para (3.58) a desigualdade dada por:
_
_
A
T
f
PA
f
P+
k
P A
T
f
PB
1f
A
T
f
PB
2f
B
T
1 f
PA
f
B
T
1 f
PB
1f
k
I B
T
1f
PB
2f
B
T
2 f
PA
f
B
T
2f
PB
1f
B
T
2 f
PB
2f
(
k
+
k
w
2
0
)R
1
_
_
0. (3.61)
No entanto, a desigualdade (3.61) deve ser vericada para toda matriz A
f
, com A D
A
e
B
2
D
B
2
. Como as incertezas so convexas, avalia-se (3.61) somente nos vrtices (A
i
, B
2j
) de
D
A
D
B
2
.
A partir dos resultados apresentados nos lemas 1, 2 e 3, o seguinte teorema fornece uma
soluo para o Problema 1.
Teorema 1. Seja o sistema incerto (3.13) sujeito as restries no controle e na sada, e
(P, L
K
,
k
,
k
) a soluo do problema de otimizao
min
P,L
K
,
k
,
k
(3.62)
sujeito a
_
2
i
h
T
i
T
2
L
K
C
y
C
T
y
L
T
K
2
h
i
P
_
0, i = 1, 2, . . . , n
h
, (3.63)
3.4 Sntese de Controladores Robustos H
28
_
2
i
T
i
T
1
C
y
C
T
y
i
P
_
0, i = 1, 2, . . . , n
n
, (3.64)
_
_
P PA
f
PB
1 f
0
A
T
f
P P 0 C
T
1f
B
T
1f
P 0 I D
T
11f
0 C
1f
D
11f
I
_
_
< 0, (3.65)
_
_
A
T
f
PA
f
P+
k
P A
T
f
PB
T
1f
A
T
f
PB
T
2f
B
T
1f
PA
f
B
T
1 f
PB
1 f
k
I B
T
1 f
PB
2f
B
T
2f
PA
f
B
T
2f
PB
1f
B
T
2 f
PB
2 f
(
k
k
w
2
0
)R
1
_
_
0, (3.66)
para k = 1, 2, . . . , NM e em cada vrtice (A
i
, B
2j
) de D
A
D
B
2
.
Assim, o controlador L
K
uma soluo do problema de controle robusto H
de sistemas
sujeitos a restries no controle e na sada em tempo discreto e o conjunto elipsoidal , gerado
por P, positivamente (D,R)-invariante para o sistema em malha fechada (3.6).
Demonstrao: As LMIs (3.63) e (3.64) garantem, de acordo com os lemas 3.4.1 e 3.4.2, que
o conjunto elipsoidal verica a condio (3.31), isto , D
.
Partindo-se da denio de norma H
, as desigualdades matriciais (3.65) (Gahinet e
Apkarian, 1994), garantem o desempenho do controlador.
As desigualdades matriciais (3.66), conforme o lema 3.4.3, garantem (D, R)-invarincia
positiva do conjunto para o sistema de malha fechada.
As desigualdades matriciais apresentadas em (3.65) e (3.66) so bilineares (BMIs), ou
seja, no so convexas em L
K
, P e
k
. Assim, para solucionar este problema de otimizao,
proposto, no prximo captulo, um algoritmo hbrido, utilizando-se Evoluo Diferencial e
LMIs.
29
4 Algoritmo de Sntese
4.1 Introduo
Neste captulo, apresentada uma descrio sobre o mtodo de otimizao evolutiva,
conhecido como Evoluo Diferencial (ED), e o algoritmo de sntese proposto como objetivo de
solucionar o problema abordado neste trabalho. Considerando-se que o problema a ser resolvido
sucientemente complexo, o que acaba dicultando uma formulao matemtica que atenda
os requisitos bsicos de tratabilidade pelas ferramentas convencionais, a abordagem via ED
torna-se atrativa.
Na seo 4.2, o conceito principal e as etapas de implementao do ED so descritas. As
estratgias de ED so apresentandas na seo 4.3. Na seo 4.4, o algoritmo de sntese hbrido
desenvolvido, utilizando os conceitos de Evoluo Diferencial e LMIs, apresentado.
4.2 Evoluo Diferencial
Evoluo Diferencial (ED) pode ser classicado como um algoritmo evolutivo codicado
em ponto utuante, voltado para otimizao global sobre espaos contnuos. O algoritmo
de ED foi proposto por (Storn e Price, 1995, 1997) para solucionar o problema de ajuste
polinomial de Chebyshev. Assim como os Algoritmos Genticos, as Estratgias Evolutivas
e a Programao Evolutiva, a Evoluo Diferencial faz parte de uma grande rea conhecida
como Computao Evolutiva. Entretanto, a Evoluo Diferencial considerada mais ecaz e
robusta do que as demais subreas (Vesterstrom e Thomsen, 2004), podendo ser utilizada para
encontrar solues aproximadas em problemas prticos em que as funes objetivo so no
lineares ou no diferenciveis no espao contnuo.
Conforme (Cheng e Hwang, 2001), a escolha do algoritmo de ED para otimizao de
problemas baseada nas seguintes caractersticas: um algoritmo de busca estocstica,
originado dos mecanismos de seleo natural; busca a soluo em diferentes regies do espao,
4.2 Evoluo Diferencial 30
ou seja, dicilmente torna-se preso em timos locais; permite que os parmetros de entrada e
sada sejam manipulados como nmeros ordinrios reais utilizando ecientemente os recursos
do computador; e ecaz trabalhando com uma populao pequena.
O processo de otimizao de um algoritmo de ED consiste basicamente em adicionar a
diferena vetorial ponderada, entre dois indivduos escolhidos aleatoriamente na populao, a
um terceiro indivduo, gerando assim um indivduo modicado. Em seguida, as componentes
do indivduo modicado so recombinadas com as componentes de um indivduo escolhido
aleatoriamente, resultando emumindivduo tentativa. Se este indivduo tentativa resultar emum
valor da funo objetivo menor que o do indivduo escolhido anteriormente de forma aleatria,
ento ele o substituir na gerao seguinte.
Este processo de ED pode ser dividido em cinco etapas: inicializao, mutao,
recombinao, avaliao e seleo. A gura 2 representa o procedimento geral do algoritmo
da evoluo diferencial com as respectivas etapas.
Figura 2: Processo da Evoluo Diferencial.
4.2.1 Inicializao
Na fase de inicializao, as variveis de controle so inicializadas e a populao inicial
gerada. As variveis de controle a serem inicializadas so: F (fator que controla a amplitude da
diferena ponderada), CR (probabilidade de cruzamento) e NP (tamanho da populao).
Em (Storn e Price, 1997) so recomendados valores que devem ser adotados para as
variveis de controle. O valor de F a ser escolhido deve pertencer ao intervalo [0,2], e quanto
maior for o tamanho da populao escolhida, menor deve ser o valor de F. Para a varivel
CR, o valor a ser escolhido deve pertencer ao intervalo [0,1]. Valores prximos a 0 tornam
a convergncia do algoritmo mais lenta e valores prximos a 1 tornam a convergncia mais
rpida. O tamanho da populao NP deve ser escolhido como sendo 10 D, onde D igual
dimenso ou ao nmero de variveis do problema.
Aps a inicializao das variveis de contole, a populao inicial gerada. A populao
inicial contm NP indivduos, denominado de vetores. Cada vetor contm n componentes, que
4.2 Evoluo Diferencial 31
representam as variveis do problema de otimizao. Os indivduos da populao inicial so
escolhidos aleatoriamente, geralmente com distribuio de probabilidade uniforme.
4.2.2 Mutao
Aps as variveis sereminicializadas e a populao inicial ser gerada, ocorre a mutao, que
um operador baseado na evoluo natural, cujo objetivo manter a diversidade da populao
e expandir o espao de busca.
Neste trabalho, a forma de realizar a mutao ocorre da maneira descrita a seguir. Entre
os NP indivduos da populao, so escolhidos aleatoriamente trs vetores X
, X
e X
distintos entre si. Na gerao q um par de vetores (X
,X
) dene uma diferena X
- X
. Esta
diferena multiplicada pela varivel de controle F, sendo denotada por diferena ponderada.
A diferena ponderada usada para perturbar o terceiro vetor X
. Assim, para cada vetor
X
(q)
i
, i = 1, 2, . . . , NP, chamado de vetor alvo, na gerao q, um vetor mutante gerado pela
expresso:
V
(q+1)
i
= X
(q)
+F(X
(q)
X
(q)
), (4.1)
onde os indces aleatrios , e {1, . . . , NP} devem ser diferentes entre si, e diferentes de
i. Portanto, so gerados NP vetores mutantes V
(q+1)
i
, i = 1, 2, . . . , NP.
4.2.3 Recombinao
Na fase de recombinao introduzido o cruzamento para aumentar a diversidade dos
indivduos que sofreram a mutao. O vetor tentativa U
(q+1)
i
, resultante do cruzamento,
formado pela mistura dos componentes do vetor mutante V
(q+1)
i
com o vetor alvo X
(q)
i
, para
cada i = 1, 2, . . . , NP.
As componentes do vetor tentativa U
(q+1)
i
, representadas por u
(q+1)
i( j)
, j = 1, 2, . . . , D, so
formadas conforme a expresso:
u
(q+1)
i( j)
=
_
_
_
v
(q+1)
i( j)
, se r
i
CR ou j = (i),
x
(q)
i( j)
, se r
i
>CR e j = (i), j = 1, 2, . . . , D,
(4.2)
onde r
i
um nmero gerado aleatoriamente no intervalo [0,1], x
(q)
i( j)
e v
(q+1)
i( j)
so as componentes
dos vetores alvo X
(q)
i
e mutante V
(q+1)
i
, respectivamente, CR a probabilidade do cruzamento,
ou seja, a probabilidade do vetor tentativa herdar os valores das variveis do vetor doador
V
(q+1)
i
, e (i) um nmero aleatrio escolhido no conjunto {1, 2, . . . , D}.
4.3 Estratgias da Evoluo Diferencial 32
Quando a probabilidade de cruzamento CR for igual a 1, todas as componentes do vetor
tentativa U
(q+1)
i
sero herdadas do vetor doador V
(q+1)
i
. Caso a probabilidade de cruzamento
CR for igual a 0, todas as componentes do vetor tentativa sero herdades do vetor alvo X
(q)
i
.
4.2.4 Avaliao
Na fase de avaliao, o custo de cada um dos indvduos i = 1, 2, . . . , NP, do vetor alvo
X
(q)
i
e do vetor tentativa U
(q+1)
i
so calculados, representados respectivamente por f (X
(q)
i
) e
f (U
(q+1)
i
).
4.2.5 Seleo
Na fase de seleo, os melhores lhos so produzidos, e portanto so determinados
os vetores alvo da gerao seguinte. O custo do vetor tentativa U
(q+1)
i
, representado por
f (U
(q+1)
i
), comparado com o custo do vetor alvo X
(q)
i
, representado por f (X
(q)
i
), para cada
i = 1, 2, . . . , NP. Se o custo do vetor alvo for menor que o custo do vetor tentativa, ao vetor alvo
permitido avanar para a prxima gerao. Caso contrrio, o vetor tentativa substitui o vetor
alvo na gerao seguinte. Este processo de seleo pode ser escrito como:
Se f (U
(q+1)
i
) f (X
(q)
i
), ent ao X
(q+1)
i
=U
(q+1)
i
,
Se f (U
(q+1)
i
) > f (X
(q)
i
), ent ao X
(q+1)
i
= X
(q)
i
, i = 1, 2, . . . , NP.
(4.3)
Para que o procedimento de ED seja nalizado, algum critrio de parada deve ser adotado,
como por exemplo, estabelecendo-se um nmero mximo de geraes.
4.3 Estratgias da Evoluo Diferencial
O algoritmo de ED pode variar de acordo com o critrio de escolha do indivduo a
ser modicado na formao do vetor mutante, o nmero de indivduos considerados para
perturbao e o tipo de cruzamento a ser utilizado. As estratgias de EDl so usualmente escritas
pela notao ED/a/b/c, onde:
a - especica o vetor a ser modicado X
, podendo ser rand (um vetor da populao
escolhido aleatoriamente) ou best (o vetor de menor custo da populao);
b - determina o nmero de vetores diferena usados na mutao;
4.4 Algoritmo Hbrido 33
c - denota o tipo de cruzamento, exponencial (exp) ou binomial (bin).
Alternando entre os diferentes valores de a, b e c, dez estratgias podem ser descritas de
acordo com a Tabela 1. A estratgia a ser adotada para um problema determinada por tentativa
e erro, pois uma estratgia que funciona bem para um dado problema pode no funcionar bem
quando aplicada a outro problema.
Tabela 1: Estratgias da Evoluo Diferencial
Nmero Mutao Notao
1 V
(q+1)
= X
(q)
+F(X
(q)
X
(q)
) ED/rand/1/bin
2 V
(q+1)
= X
(q)
best
+F(X
(q)
X
(q)
) ED/best/1/bin
3 V
(q+1)
= X
(q)
+F(X
(q)
X
(q)
+X
(q)
X
(q)
) ED/rand/2/bin
4 V
(q+1)
= X
(q)
best
+F(X
(q)
X
(q)
+X
(q)
X
(q)
) ED/best/2/bin
5 V
(q+1)
= X
(q)
old
+F(X
(q)
best
X
(q)
old
+X
(q)
X
(q)
) ED/rand-to-best/2/bin
6 V
(q+1)
= X
(q)
+F(X
(q)
X
(q)
) ED/rand/1/exp
7 V
(q+1)
= X
(q)
best
+F(X
(q)
X
(q)
) ED/best/1/exp
8 V
(q+1)
= X
(q)
+F(X
(q)
X
(q)
+X
(q)
X
(q)
) ED/rand/2/exp
9 V
(q+1)
= X
(q)
best
+F(X
(q)
X
(q)
+X
(q)
X
(q)
) ED/rand/2/exp
10 V
(q+1)
= X
(q)
old
+F(X
(q)
best
X
(q)
old
+X
(q)
X
(q)
) ED/rand-to-best/2/exp
Fonte: (Arantes et al., 2006).
4.4 Algoritmo Hbrido
No captulo anterior, foi formulado o Teorema 1, com a nalidade de resolver o problema
proposto neste trabalho. No entanto, o teorema composto por desigualdades matriciais que
no so convexas, e, consequentemente, tem-se um problema no convexo a ser solucionado.
Assim, um algoritmo hbrdo proposto baseado em ED e em LMIs, a m de resolver o
problema de projeto de controladores robustos.
A Computao Evolutiva, que um importante mtodo de otimizao, vem sendo aplicada
com sucesso a uma grande variedade de problemas de otimizao em engenharia. A medida
que novos problemas de otimizao em engenharia aparecem, sempre com funes objetivo
sendo no-diferencivel, no-contnua, no-linear, perturbada e multidimensional, ou possuindo
vrios mnimos locais e restries complexas por causa dos diferentes requerimentos prticos,
as abordagens ecazes e viveis para solucionar tais problemas esto se tornando insatisfatrias
e insucientes. A ED, que um mtodos de otimizao pertencente a rea da Computao
4.4 Algoritmo Hbrido 34
Evolutiva, tem sua efetividade e ecincia demonstrada com sucesso nos ltimos anos atravs
de uma ampla quantidade de aplicaes (Nearchou e Omirou, 2006), tornando-se um mtodo
satisfatrio para solucionar tais problemas em engenharia (Ronkkonen et al., 2005; Salman et
al., 2007).
Para que o problema seja solucionado, necessrio encontrar os valores de quatro variveis:
P, L
K
,
k
e
k
. Baseado na estrutura geral do algoritmo de ED, com um conjunto de
solues candidatas para as variveis L
K
e
k
, as desigualdades matriciais do problema podem
ser tratadas como sendo convexas (LMIs). Assim, para cada par (L
K
,
k
) o algoritmo pode
determinar, resolvendo um problema de otimizao convexo, as demais variveis do problema,
P e
k
.
Desta forma, o algoritmo hbrido proposto gera uma populao inicial Pop de solues
candidatas (indivduos) para as variveis L
K
e
k
. Em cada gerao j, o problema de otimizao
convexo resultante pode ser resolvido utilizando o pacote LMI-Lab do software MATLAB,
(Gahinet et al., 1995) para cada soluo candidata, ou seja, o par (L
K
,
k
). Assim, todos os
indivduos da populao Pop so avaliados e ao nal de determinando nmero de geraes,
encontram-se os valores das variveis que solucionam o problema apresentado, de tal forma
que as desigualdades sejam satisfeitas.
4.4.1 Algoritmo
O algoritmo proposto para resolver o Problema 1, com a minimizao da norma H
, pode
ser descrito como:
Algoritmo 1 Algoritmo de Sntese
Gerar uma populao inicial factvel Pop;
eval
P
Calcular a aptido de cada indivduo de Pop
enquanto Nmero de geraes no for atingido ( j < J) faa
Gerar o vetor modicado V;
U Realizar o cruzamento entre Pop e V;
eval
U
Calcular a aptido de cada indivduo de U;
para i = 1 at M faa
se eval
U
i
> eval
P
i
ento
Substituir Pop
i
por U
i
em Pop
m se
m para
m enquanto
4.4 Algoritmo Hbrido 35
4.4.2 Inicializao do Controlador
Para inicializar os indivduos L
K
, a gerao da populao inicial clssica de ED, apresentada
em (Storn e Price, 1995), requer um enorme esforo computacional, porque o espao de
busca no convexo e os limites do espao de busca so desconhecidos. A m de reduzir o
esforo computacional na gerao de indivduos factveis, uma abordagem descrita em (Arajo,
1998) foi implementada. Esta abordagem fornece uma condio suciente para a gerao de
elementos factveis, do ponto de vista da estabilidade quadrtica, atravs de um problema de
controle robusto por realimentao de estados.
Portanto, necessrio que o problema de controle robusto por realimentao de sada
esttica seja escrito na forma de um problema de controle por realimentao de estados.
Utilizando-se a lei de controle u = L
K
y, onde L
K
dado por (3.5), o problema de controle
robusto por realimentao de sada dinmica pode ser reescrito como um sistema por
realimentao de sada esttica, possibilitando o problema ser escrito como um problema de
controle por realimentao de estados. Seja o sistema obtido a partir de
_
_
x(k +1) =
Ax
f
(k) +
B
1
w(k) +
B
2
u(k)
y(k) =
C
y
x
f
(k)
z(k) =
C
1
x
f
(k) +
D
11
w(k) +
D
12
u(k)
, (4.4)
A lei de controle por realimentao esttica de sida dada por:
u = L
K
y. (4.5)
Se o posto de C
y
no for completo, gera-se uma matriz aleatria N tal que a matriz
M =
_
N
C
y
_
(4.6)
tenha posto completo. Com a matriz M, denida em (4.6), realiza-se a transformao de
similaridade x = Mx
f
e o sistema se torna:
_
_
x(k +1) = Ax
f
(k) +B
1
w(k) +B
2
u(k)
y(k) =C
y
x
f
(k)
z(k) =C
1
x
f
(k) +D
11
w(k) +D
12
u(k)
, (4.7)
onde A = M
AM
1
, B
1
= M
B
1
, B
2
= M
B
2
, C
1
=
C
1
M
1
e C
y
=
C
y
M
1
. A lei de controle
resultante dada por
u = LC
y
M
1
x = Lx, (4.8)
4.4 Algoritmo Hbrido 36
onde o novo controlador L possui a seguinte estrutura:
L =
_
0 L
K
_
. (4.9)
Para tornar o problema convexo e encontrar os controladores factveis L
K
, utiliza-se a
transformao L G = L, com matrizes de estrutura xa dadas por
G =
_
[]
(np)
0
0 []
(p)
_
L =
_
0
(m(np))
[]
(mp)
_
(4.10)
para solucionar as LMIs,
_
P
i j
A
i
G+B
2j
L
G
T
A
T
i
+L
T
B
T
2j
G+G
T
P
i j
_
0, (4.11)
em cada vrtice (A
i
, B
2j
) de D
A
D
B
2
.
O controlador robusto L
K
extrado de L e os
k
so determinados de forma aleatria.
Conforme (Neumann, 2006), as restries impostas s estruturas de G e L inserem um
conservadorismo extra na gerao da populao inicial, fazendo com que o procedimento no
encontre solues factveis para determinados problemas ou connando a populao inicial em
uma regio restrita do espao de busca, comprometendo a regio inicial de busca e a diversidade
da populao inicial.
37
5 Resultados
5.1 Introduo
Este captulo tem como objetivo a validao do mtodo proposto para a soluo do
problema de controle robusto H
de sistemas discretos sujeitos a restries no controle e na
sada. Assim, dois exemplos extrados da literatura, relacionados com o problema abordado,
so estudados.
5.2 Exemplo 1
Neste exemplo, utilizado um sistema incerto em tempo discreto, baseado no problema
descrito em (Lu et al., 2005), e descrito pelas seguintes equaes:
_
_
x(k +1) = Ax(k) +B
1
w(k) +B
2
u(k),
y(k) =C
y
x(k),
z(k) =C
1
x(k) +D
11
w(k) +D
12
u(k),
com
A
1
=
_
0, 1 0, 2
0 1
_
, A
2
=
_
0, 2 0, 2
0 1
_
,
B
1
=
_
1
1
_
, B
21
=
_
2
2
_
, B
22
=
_
4
4
_
,
C
1
=
_
1 0
_
, C
y
=
_
1 2
_
,
D
11
= [0, 1] , D
12
= [1] .
5.2 Exemplo 1 38
O sinal de controle est sujeito s seguintes restries:
1 u(k) 1.
As restries no sinal de sada so dadas por:
5 y(k) 5,
e o sinal de perturbao est restrito a uma esfera de raio w
0
= 0, 2 e centro na origem.
A entrada de referncia satisfaz seguinte restrio:
1 r(k) 1.
O controlador por realimentao dinmica de sada, de ordem completa (n
c
= 2), obtido
pelo algoritmo de sntese apresentado na seo 4.4, denido por
_
(k +1) = A
k
(k) +B
k
e(k),
u(k) =C
k
(k) +D
k
e(k),
com
A
k
=
_
0, 0301 0, 3288
0, 2561 0, 3994
_
, B
k
=
_
0, 4269
0, 1933
_
,
C
k
=
_
0, 1031 0, 0380
_
, D
k
= [0] .
A norma H
associada ao limitante superior = 1, 3445 e o melhor valor do vetor
k
encontrado :
k
=
_
0, 2664 0, 2678
_
.
O conjunto positivamente (D, R)-invariante determindo pela matriz
P =
_
_
0, 9696 0, 1173 0, 0101 0, 0157
0, 1173 0, 7490 0, 3518 0, 0150
0, 0101 0, 3518 0, 5057 0, 3171
0, 0157 0, 0150 0, 3171 0, 3400
_
_
.
5.2 Exemplo 1 39
Neste exemplo, o algoritmo foi executado durante 200 geraes com uma populao inicial
de 20 indivduos, e as variveis de controle do ED foram CR = 0, 8 e F = 0, 5. A evoluo dos
valores da norma H
durante a execuo do algoritmo hbrido apresentada na Figura 3. Nota-
se que a partir da centsima gerao, a norma j est prxima de seu valor timo, justicando a
parada do algoritmo em 200 iteraes.
Figura 3: Evoluo da norma H
ao longo das geraes
Nas Figuras 4 e 5, so ilustrados os sinais de controle e sada do sistema em malha
fechada quando o processo denido pelo modelo tal com vrtices (A
1
, B
21
) e (A
2
, B
22
),
respectivamente. Nestas guras no h perturbao externa atuando sobre o processo, isto ,
w(k) = 0, k, e o sinal de referncia 1, isto , r(k) =1, k 0.
(a) Sinal de Controle (b) Sinal de Sada
Figura 4: Sinais de Controle e Sada para o sistema denido por (A
1
, B
21
).
5.2 Exemplo 1 40
(a) Sinal de Controle (b) Sinal de Sada
Figura 5: Sinais de Controle e Sada para o sistema denido por (A
2
, B
22
).
Nas Figuras 6 e 7, so ilustrados os sinais de controle e sada do sistema em malha
fechada quando o processo denido pelo modelo tal com vrtices (A
1
, B
21
) e (A
2
, B
22
),
respectivamente. Nestas guras no h perturbao externa atuando sobre o processo, isto ,
w(k) = 0, k, e o sinal de referncia 1, isto , r(k) = 1, k 0.
(a) Sinal de Controle (b) Sinal de Sada
Figura 6: Sinais de Controle e Sada para o sistema denido por (A
1
, B
21
).
5.2 Exemplo 1 41
(a) Sinal de Controle (b) Sinal de Sada
Figura 7: Sinais de Controle e Sada para o sistema denido por (A
2
, B
22
).
Nas Figuras 8 e 9, so ilustrados os sinais de controle e sada do sistema em malha
fechada quando o processo denido pelo modelo tal com vrtices (A
1
, B
21
) e (A
2
, B
22
),
respectivamente. Nestas guras h perturbao externa atuando sobre o processo, isto ,
w(k) = 0, 2, k, e o sinal de referncia 1, isto , r(k) =1, k 0.
(a) Sinal de Controle (b) Sinal de Sada
Figura 8: Sinais de Controle e Sada para o sistema denido por (A
1
, B
21
).
5.2 Exemplo 1 42
(a) Sinal de Controle (b) Sinal de Sada
Figura 9: Sinais de Controle e Sada para o sistema denido por (A
2
, B
22
).
Nas Figuras 10 e 11, so ilustrados os sinais de controle e sada do sistema em malha
fechada quando o processo denido pelo modelo tal com vrtices (A
1
, B
21
) e (A
2
, B
22
),
respectivamente. Nestas guras h perturbao externa atuando sobre o processo, isto ,
w(k) = 0, 2, k, e o sinal de referncia 1, isto , r(k) = 1, k 0.
(a) Sinal de Controle (b) Sinal de Sada
Figura 10: Sinais de Controle e Sada para o sistema denido por (A
1
, B
21
).
5.2 Exemplo 1 43
(a) Sinal de Controle (b) Sinal de Sada
Figura 11: Sinais de Controle e Sada para o sistema denido por (A
2
, B
22
).
Dentre as Figuras 4 11 pode ser observado que as restries nos sinais de controle e
de sada so respeitadas pelo controlador projetado para o sistema apresentado, na ausncia
ou presena de um sinal de perturbao. O desempenho do controlador projetado satisfatrio,
uma vez que quanto menor for o valor da norma H
, menor ser o efeito da perturbao externa
w sobre o sinal de sada do sistema.
O exemplo foi executado durante 20 vezes, para os parmetros apresentados acima, o que
permitiu determinar o desvio padro e a mediana dos valores da norma H
. O desvio padro
calculado foi de 0,0158 e a mediana foi de 1,3365.
A Tabela 2 mostra os resultados obtidos para este problema, considerando-se controladores
com dimenses diferentes.
Tabela 2: Resultado do limitante superior da norma H
para controladores de diferentes
dimenses.
Ordem do Controlador
1 1,33
2 1,34
Nota-se que os limitantes da norma H
so prximos para os dois controladores, ou seja, o
desempenho do sistema permanece o mesmo para as diferentes dimenses.
5.3 Exemplo 2 44
5.3 Exemplo 2
Este exemplo uma adaptao do problema descrito em (Zhai et al., 2002). Seja o sistema
incerto em tempo discreto, descrito pelas seguintes equaes:
_
_
x(k +1) = Ax(k) +B
1
w(k) +B
2
u(k),
y(k) =C
y
x(k),
z(k) =C
1
x(k) +D
11
w(k) +D
12
u(k),
e
A =
_
_
0, 46 1, 08 1, 15 0, 99
0, 33 0, 52 1, 28 0, 97
1, 38 0, 34 0, 65 0, 67
0, 53 0, 55 0, 19 0, 27
_
_
, B
1
=
_
_
0, 29
0, 71
0, 49
0, 20
_
_
, B
2
=
_
_
0, 73
2, 02
1, 82
b
1
_
_
,
C
1
=
_
0, 67 0, 40 0, 18 0, 40
_
, C
y
=
_
1, 71 0, 93 0, 64 0, 63
_
,
D
11
= [0, 63] , D
12
= [0] ,
com 1 b
1
0, 43.
O sinal de controle est sujeito s seguintes restries:
10 u(k) 10.
As restries no sinal de sada so dadas por:
10 y(k) 10,
e a perturbao est restrita a uma esfera de raio w
0
= 0, 5 e centro na origem..
A entrada de referncia satisfaz seguinte restrio:
3 r(k) 3.
O controlador por realimentao dinmica de sada, de ordem completa (n
c
= 4), obtido
pelo algoritmo de sntese apresentado na seo 4.4, denido por
_
(k +1) = A
k
(k) +B
k
e(k),
u(k) =C
k
(k) +D
k
e(k),
5.3 Exemplo 2 45
onde
A
k
=
_
_
0, 2655 0, 1274 0, 4447 0, 6310
0, 0559 0, 0286 0, 6946 1, 1710
0, 2297 0, 6007 0, 1273 0, 3175
0, 1415 0, 2733 0, 1752 0, 6427
_
_
, B
k
=
_
_
0, 2404
0, 2287
0, 2346
0, 2511
_
_
,
C
k
=
_
0, 6191 0, 4019 0, 2189 0, 2047
_
, D
k
= [0] .
A norma H
associada ao limitante superior = 52, 75 e o melhor valor do vetor
k
encontrado :
k
=
_
0, 2257 0, 2186
_
.
O conjunto positivamente (D, R)-invariante determindo pela matriz:
P=
_
_
2, 0860 1, 4276 1, 4478 2, 4099 2, 2364 1, 8234 4, 1340 3, 1826
1, 4276 1, 1041 0, 9100 1, 6519 1, 5995 1, 2760 2, 9709 2, 2330
1, 4478 0, 9100 1, 0995 1, 7204 1, 5611 1, 2358 2, 8457 2, 2467
2, 4099 1, 6519 1, 7204 2, 8559 2, 6504 2, 1038 4, 8886 3, 7869
2, 2364 1, 5995 1, 5611 2, 6504 11, 0386 8, 2752 5, 4681 1, 9806
1, 8234 1, 2760 1, 2358 2, 1038 8, 2752 6, 3598 4, 2368 1, 6098
4, 1340 2, 9709 2, 8457 4, 8886 5, 4681 4, 2368 8, 7419 6, 5371
3, 1826 2, 2330 2, 2467 3, 7869 1, 9806 1, 6098 6, 5371 5, 5933
_
_
.
O algoritmo foi executado durante 200 geraes com uma populao inicial de 20
indivduos, e as variveis de controle do ED foram CR = 0, 8 e F = 0, 5. A evoluo dos
valores da norma H
durante a execuo do algoritmo hbrido apresentada na Figura 12.
5.3 Exemplo 2 46
Figura 12: Evoluo da norma H
ao longo das geraes.
Nas Figuras 13 e 14, so ilustrados os sinais de controle e sada do sistema em malha
fechada quando o processo denido pelo modelo tal com vrtices (A, B
21
) e (A, B
22
),
respectivamente. Nestas guras no h perturbao externa atuando sobre o processo, isto ,
w(k) = 0, k, e o sinal de referncia 3, isto , r(k) =3, k 0.
(a) Sinal de Controle (b) Sinal de Sada
Figura 13: Sinais de Controle e Sada no vrtice (A, B
21
).
5.3 Exemplo 2 47
(a) Sinal de Controle (b) Sinal de Sada
Figura 14: Sinais de Controle e Sada no vrtice (A, B
22
).
Nas Figuras 15 e 16, so ilustrados os sinais de controle e sada do sistema em malha
fechada quando o processo denido pelo modelo tal com vrtices (A, B
21
) e (A, B
22
),
respectivamente. Nestas guras no h perturbao externa atuando sobre o processo, isto ,
w(k) = 0, k, e o sinal de referncia 3, isto , r(k) = 3, k 0.
(a) Sinal de Controle (b) Sinal de Sada
Figura 15: Sinais de Controle e Sada no vrtice (A, B
21
).
5.3 Exemplo 2 48
(a) Sinal de Controle (b) Sinal de Sada
Figura 16: Sinais de Controle e Sada no vrtice (A, B
22
).
Nas Figuras 17 e 18, so ilustrados os sinais de controle e sada do sistema em malha
fechada quando o processo denido pelo modelo tal com vrtices (A, B
21
) e (A, B
22
),
respectivamente. Nestas guras h perturbao externa atuando sobre o processo, isto ,
w(k) = 0, 5, k, e o sinal de referncia 3, isto , r(k) =3, k 0.
(a) Sinal de Controle (b) Sinal de Sada
Figura 17: Sinais de Controle e Sada no vrtice (A, B
21
).
5.3 Exemplo 2 49
(a) Sinal de Controle (b) Sinal de Sada
Figura 18: Sinais de Controle e Sada no vrtice (A, B
22
).
Nas Figuras 19 e 20, so ilustrados os sinais de controle e sada do sistema em malha
fechada quando o processo denido pelo modelo tal com vrtices (A, B
21
) e (A, B
22
),
respectivamente. Nestas guras h perturbao externa atuando sobre o processo, isto ,
w(k) = 0, 5, k, e o sinal de referncia 3, isto , r(k) = 3, k 0.
(a) Sinal de Controle (b) Sinal de Sada
Figura 19: Sinais de Controle e Sada no vrtice (A, B
21
).
5.3 Exemplo 2 50
(a) Sinal de Controle (b) Sinal de Sada
Figura 20: Sinais de Controle e Sada no vrtice (A, B
22
).
Dentre as guras 13 20 pode ser observado que as restries nos sinais de controle e
de sada so respeitadas pelo controlador projetado para o sistema apresentado, na ausncia
ou presena de um sinal de perturbao. O desempenho do controlador projetado no to
satisfatrio, pois o valor da norma H
relativamente alto, no fornecendo uma boa ltragem
do sinal de perturbao.
O problema foi executado durante 20 vezes consecutivas para os parmetros apresentados
acima, o que permitiu determinar o desvio padro e a mediana dos valores da norma H
. O
desvio padro calculado foi de 3,17 e a mediana foi de 49,26.
A Tabela 3 mostra os resultados obtidos para este problema considerando controladores
com dimenses diferentes.
Tabela 3: Resultado do limitante superior da norma H
para controladores de diferentes
dimenses.
Ordem do Controlador
2 52,27
3 52,51
4 52,75
Nota-se pela Tabela 3 que as normas H
obtidas so relativamentes altas, no fornecendo
uma boa ltragem do sinal de perturbao. No entanto, o desempenho do sistema permanece o
mesmo para as diferentes dimenses dos controladores.
51
6 Concluso
Neste trabalho foi abordado o problema da sntese de controladores robustos de sistemas
discretos sujeitos a restries no controle e na sada, utilizando como critrio de desempenho a
norma H
.
A descrio do problema baseada em um controlador por realimentao de sada
dinmica, que garante a estabilidade e o desempenho do sistema frente as incertezas e restries
a qual est submetido. Para solucionar o problema foram utilizados os conceitos de estabilidade
quadrtica e de invarincia positiva. As restries no controle e na sada so satisfeitas
utilizando uma funo de Lyapunov quadrtica, que assegura a (D,R)-invarincia positiva de
conjuntos elipsoidais. Desta maneira, no ocorrem saturaes nas variveis do sistema.
No entanto, o teorema apresentado, que trata da sntese do controlador, expresso atravs
de desigualdades matriciais lineares (LMIs) e bilineares (BMIs), ou seja, caracterizado como
um problema de otimizao no-convexo. As LMIs podem ser tratadas computacionalmente
utilizando a caixa de ferramentas LMI Control Toolbox do software Matlab. Porm, para que
as BMIs fossem tratadas computacionalmente, foi utilizado em conjunto com o LMI Control
Toolbox um mtodo baseado em Evoluo Diferencial.
A Evoluo Diferencial uma ferramenta capaz de solucionar problemas de otimizao
no-convexos e dessa maneira, optou-se em propor um algoritmo hbrido baseado em Evoluo
Diferencial e LMIs. Esse algoritmo busca uma soluo robusta para a sntese do controlador
que satisfaa as restries no controle e na sada. Uma diculdade deste mtodo encontrada
na inicializao do algoritmo e na determinao da populao inicial de controladores factveis.
Esse processo de inicializao pode connar a populao inicial em uma regio restrita do
espao de busca.
O algoritmo proposto foi aplicado em exemplos retirados da literatura e encontrou um
controlador que solucionasse o problema de controle robusto H
sujeito a restries. Esse
controlador pode ser de ordem reduzida ou de ordem completa, diferentemente de vrios
mtodos de sntese que requerem que o controlador seja de ordem completa. importante
6 Concluso 52
notar que essa sequncia de minimizao no garantir a convergncia para um timo global da
soluo, ou mesmo local. No entanto, o algoritmo apresentado oferece uma opo interessante
para resolver o problema.
Como trabalhos futuros de aplicao do controle robusto H
, pode-se sugerir os seguintes
tpicos de pesquisa:
utilizar o conceito de funo de Lyapunov dependente de parmetros para formular uma
soluo para o problema;
considerar o problema de controle robusto H
, onde as incertezas do sistema so
limitadas em norma;
desenvolver algoritmos hbridos baseados nos outros paradigmas da Computaco
Evolutiva, tais como o algoritmo gentico, a programao evolutiva e a estratgia
evolutiva. Assim, ser possvel avaliar qual paradigma que apresenta os melhores
resultados para o problema apresentado neste trabalho;
utilizar diferentes critrios de desempenho para realizar a sntese do controlador como,
por exemplo, a norma mista H
2
/H
e a alocao de plos;
utilizar mtodos de inicializao para a obteno dos controladores da populao inicial,
no algoritmo hbrido proposto neste trabalho, a m de diminuir o esforo computacional
realizado na inicializao do algoritmo.
53
Referncias
ABBAS-TURKI, M.; DUC, G.; CLEMENT, B. LMI formulations for designing controllers
according to time response and stability margin constraints. In: Proceedings of the 44th IEEE
Conference on Decision and Control and the European Control Conference. Seville, Spain:
IEEE, 2005. p. 57405745.
AGUIRRE, L. A. Introduo identicao de sistemas: tcnicas lineares e no-lineares
aplicadas a sistemas reais. 1. ed. Belo Horizonte: Universidade Federal de Minas Gerais, 2000.
554 p.
APKARIAN, P.; GAHINET, P. A convex characterization of gain-scheduled H
controllers.
IEEE Transactions on Automatic Control, v. 40, n. 5, p. 853864, 1995.
APKARIAN, P.; TUAN, H. D.; BERNUSSOU, J. Continuous-time analysis, eigenstructure
assignment, and H
synthesis with enhanced linear matrix inequalities (LMI) characterizations.
IEEE Transactions on Automatic Control, v. 46, n. 12, p. 19411946, 2001.
ARANTES, M. B.; OLIVEIRA, G. T. da S.; SARAMAGO, S. F. P. Evoluo diferencial
aplicada soluo de alguns problemas de Engenharia de Produo. FAMAT em Revista, v. 1,
n. 6, p. 4861, 2006.
ARAJO, H. X. Sur la stabilit des systmes incertains sujets des contraintes sur ltat et la
commande. Tese (Doutorado) Universit Paul Sabatier de Toulouse, Toulouse, 1998.
ARAJO, H. X. de; LANGNER, C. G. H
control for uncertain systems under time domain
constraints. In: Proceedings of the 44th IEEE Conference on Decision and Control and the
European Control Conference. Seville, Spain: IEEE, 2005. p. 13251330.
ARAJO, H. X. de; LANGNER, C. G.; NEUMANN, D. Controle robusto por realimentao
dinmica de sada de sistemas com restries. In: Congresso Brasileiro de Automtica.
Salvador, Bahia: SBA, 2006. p. 30983103.
BARA, G.; BOUTAYEB, M. A new sufcient condition for the static output feedback
stabilization of linear discrete-time systems. In: Proceedings of the 45th IEEE Conference on
Decision and Control. San Diego, CA: IEEE, 2006. p. 47234728.
BARMISH, B. R. Stabilization of uncertain systems via linear control. IEEE Transactions on
Automatic Control, v. 28, n. 8, p. 848850, 1983.
BARMISH, B. R. Necessary and sufcient conditions for quadratic stabilizability of an
uncertain system. Journal of Optimization Theory and Applications, v. 46, n. 4, p. 399408,
1985.
Referncias 54
BERAN, L. V. E.; BOYD, S. A global BMI algorithm based on the generalized benders
decomposition. In: Proceedings of the European Control Conference. Brussels, Belgium: IEEE,
1997.
BERNSTEIN, D.; HADDAD, W. LQG control with an H
performance bound: a Riccati
equation approach. IEEE Transactions on Automatic Control, v. 34, n. 3, p. 293305, 1989.
BING, C.; SIYING, Z. Design of static output feedback controller based on LMI. In:
Proceedings of the 2001 American Control Conference. Arlington, VA: IEEE, 2001. v. 5, p.
41464147.
BITSORIS, G.; GRAVALOU, E. Robust linear controller under state and control constraints. In:
Proceedings of the 31st IEEE Conference on Decision and Control. Tucson, AZ: IEEE, 1992.
v. 3, p. 26402642.
BITSORIS, G.; GRAVALOU, E. Design techniques for the control of discrete-time systems
subject to state and control constraints. IEEE Transactions on Automatic Control, v. 44, n. 5, p.
10571061, 1999.
BOYD, S. et al. Linear Matrix Inequalities in System and Control Theory. 1. ed. Philadelphia,
PA: Society for Industrial and Applied Mathematics, 1994.
CASTELAN, E.; HENNET, J. On invariant polyhedral of continuous-time linear systems. IEEE
Transactions on Automatic Control, v. 38, n. 11, p. 16801685, Nov. 1993.
CASTELAN, E.; TARBOURIECH, S. On positive invariance and output feedback stabilization
of input constrained linear systems. In: Proceedings of the 1994 American Control Conference.
Baltimore, MD: IEEE, 1994. v. 3, p. 27402744.
CHENG, S.-L.; HWANG, C. Optimal approximation of linear systems by a differential
evolution algorithm. IEEE Transactions on Systems, Man and Cybernetics, Part A, v. 31, n. 6,
p. 698707, 2001.
CHILALI, M.; GAHINET, P. H
design with pole placement constraints: An LMI approach.
IEEE Transactions on Automatic Control, v. 41, n. 3, p. 358367, 1996.
CRUSIUS, C.; TROFINO, A. Sufcient LMI conditions for output feedback control problems.
IEEE Transactions on Automatic Control, v. 44, n. 5, p. 10531057, May 1999.
DOYLE, J. et al. State-space solutions to standard H
2
and H
control problems. IEEE
Transactions on Automatic Control, v. 34, n. 8, p. 831847, 1989.
DOYLE, J. et al. Mixed H
2
and H
performance objectives ii. optimal control. IEEE
Transactions on Automatic Control, v. 39, n. 8, p. 15751587, Aug. 1994.
EBIHARA, Y.; HAGIWARA, T. Newdilated LMI characterizations for continuous-time control
design and robust multiobjective control. In: Proceedings of the 2002 American Control
Conference. Anchorage, AK: IEEE, 2002. v. 1, p. 4752.
EBIHARA, Y.; HAGIWARA, T. On H
model reduction using LMIs. IEEE Transactions on
Automatic Control, v. 49, n. 7, p. 11871191, 2004.
Referncias 55
FANG, H.; LIN, Z.; HU, T. Analysis of linear systems in the presence of actuator saturation
and L
2
-disturbances. In: Proceedings of the 42nd IEEE Conference on Decision and Control.
Maui, HI: IEEE, 2003. v. 5, p. 47114716.
GAHINET, P. Explicit controller formulas for LMI-based H
synthesis. In: Proceedings of the
1994 American Control Conference. Baltimore, MD: IEEE, 1994. v. 3, p. 23962400.
GAHINET, P.; APKARIAN, P. Alinear matrix inequality approach to H
control. International
Journal of Robust and Nonlinear Control, v. 4, p. 421448, 1994.
GAHINET, P. et al. LMI Control Toolbox For Use with MATLAB. 1. ed. Natick: The
MathWorks, 1995. 356 p.
GOH, K. et al. Biafne matrix inequality properties and computational methods. In:
Proceedings of the 1994 American Control Conference. Baltimore, MD: IEEE, 1994. v. 1, p.
850855.
GOH, K.-C.; SAFONOV, M.; PAPAVASSILOPOULOS, G. Global optimization for the biafne
matriz inequality problem. Journal of Global Optimization, v. 7, p. 365380, 1995.
GRIGORIADIS, K. M.; SKELTON, R. E. Fixed-order control design for LMI control problems
using alternating projection methods. In: Proceedings of the 33rd IEEE Conference on Decision
and Control. Orlando, FL: IEEE, 1994. v. 3, p. 20032008.
GUTMAN, P.-O.; GUTMAN, P.-O.; HAGANDER, P. A new design of constrained controllers
for linear systems. IEEE Transactions on Automatic Control, v. 30, n. 1, p. 2233, 1985.
HASSIBI, A.; HOW, J.; BOYD, S. A path-following method for solving BMI problems in
control. In: Proceedings of the 1999 American Control Conference. San Diego, CA: IEEE,
1999. v. 2, p. 13851389.
HOLLOT, C. V.; BARMISH, B. Optimal quadratic stabilizability of uncertain linear systems.
In: Proceedings of the 18th Allerton Conference on Communication, Control and Computing.
Monticello, IL: University of Illinois, 1980.
HU, L.; SUN, Y.; CAO, Y. Robust control for uncertain linear systems with constraints on
output. In: Proceedings of the 1998 American Control Conference. Philadelphia, PA: IEEE,
1998. v. 5, p. 27082712.
HUANG, S.; LAM, J.; CHEN, B. Local reliable control for linear systems with saturating
actuators. In: Proceedings of the 41st IEEE Conference on Decision and Control. Las Vegas,
NV: IEEE, 2002. v. 4, p. 41544159.
KANEV, S. et al. Robust output-feedback controller design via local BMI optimization.
Automatica, v. 40, p. 11151127, 2004.
KHARGONEKAR, P.; ROTEA, M. Mixed H
2
/H
control: a convex optimization approach.
IEEE Transactions on Automatic Control, v. 36, n. 7, p. 824837, 1991.
LANGNER, C. G. Sntese de Controladores H
2
e H
para sistemas sujeitos a incertezas e/ou
restries no domnio do tempo. Dissertao (Mestrado) Pontifcia Universidade Catlica do
Paran, Curitiba, Paran, 2004.
Referncias 56
LEITE, V. J. S. et al. Estabilidade robusta de sistemas lineares atravs de desigualdades
matriciais lineares. Revista Controle e Automao, v. 15, n. 1, p. 2440, 2004.
LJUNG, L. System identication: theory for the user. 2. ed. Upper Saddle River, NJ: Prentice
Hall PTR, 1999. 672 p.
LU, L.; YANG, R.; XIE, L. Robust H
2
and H
control of discrete-time systems with polytopic
uncertainties via dynamic output feedback. In: Proceedings of the 2005 American Control
Conference. Portland, OR: IEEE, 2005. p. 43154320.
LYAPUNOV, A. M. Problme General de la Stabilit du Movement. Toulouse, France: Edouard
Privat and Company of Toulouse, 1893.
MILANI, B. Robust linear regulator design for continuous-time systems under state and control
constraints. In: Proceedings of the 33rd IEEE Conference on Decision and Control. Orlando,
Florida: IEEE, 1994. v. 3, p. 20672068.
NEARCHOU, A. C.; OMIROU, S. L. Differential evolution for sequencing and scheduling
optimization. Journal of Heuristics, v. 12, n. 6, p. 395411, 2006.
NEUMANN, D. Sntese de controladores robustos H
2
/H
D-estveis via algoritmos
evolutivos: uma abordagem LMI. Dissertao (Mestrado) Pontifcia Universidade Catlica
do Paran, Curitiba, Paran, 2006.
OLIVEIRA, G. H. da C. Controle Preditivo para Processos com Incertezas Estruturadas
baseado em Sries de Funes Ortonormais. Dissertao (Mestrado) Universidade Estadual
de Campinas, Campinas, So Paulo, 1997.
OLIVEIRA, M. C. d.; GEROMEL, J. C.; BERNUSSOU, J. Extended H
2
and H
norm
characterizations and controller parametrizations for discrete-time systems. International
Journal of Control, v. 75, p. 666679, 2002.
PALHARES, R. M.; TAKAHASHI, R. H. C.; PERES, P. L. D. H
and H
2
guaranteed costs
computation for uncertain linear systems. International Journal of Systems Science, v. 28, p.
183188, 1997.
PEAUCELLE, D. et al. A new robust D-stability condition for real convex polytopic
uncertainty. Systems & Control Letters, v. 40, p. 2130, 2000.
REINELT, W. Maximum output amplitude of linear systems for certain input constraints. In:
Proceedings of the 39th IEEE Conference on Decision and Control. Sydney, Australia: IEEE,
2000. v. 2, p. 10751080.
REINELT, W. Robust control of a two-mass-spring system subject to its input constraints. In:
Proceedings of the 2000 American Control Conference. Chicago, IL: IEEE, 2000. v. 3, p. 1817
1821.
RONKKONEN, J.; KUKKONEN, S.; PRICE, K. V. Real-parameter optimization with
differential evolution. In: Proceedings of the IEEE Congress on Evolutionary Computation.
Edinburgh: IEEE, 2005. v. 1, p. 506513.
Referncias 57
ROSINOV, D.; VESEL, V. Robust output feedback design of discrete-time systems - linear
matrix inequality methods. In: Proceedings of the 2003 Control Systems Design. Bratislava,
Slovak Republic: IFAC, 2003. p. 363368.
ROSINOV, D.; VESEL, V.; KUCERA, V. A necessary and sufcient condition for static
output feedback stabilizability of linear discrete-time systems. Kybernetika, v. 39, n. 4, p. 447
459, 2003.
SAFONOV, M. G.; GOH, K. C.; LY, J. H. Control system synthesis via bilinear matrix
inequalities. In: Proceedings of the 1994 American Control Conference. Baltimore, MD: IEEE,
1994. p. 4549.
SALMAN, A.; ENGELBRECHT, A. P.; OMRAN, M. G. H. Empirical analysis of self-adaptive
differential evolution. European Journal of Operational Research, v. 183, n. 2, p. 785804,
2007.
SCHERER, C. Multiobjective H
control. IEEE Transactions on Automatic Control, v. 40, n. 6,
p. 10541062, June 1995.
SCHERER, C.; GAHINET, P.; CHILALI, M. Multiobjective output-feedback control via LMI
optimization. IEEE Transactions on Automatic Control, v. 42, n. 7, p. 896911, 1997.
SHARAV-SHAPIRO, N. Z.; PALMOR, Z. J.; STEINBERG, A. S. Output stabilizing robust
control for discrete uncertain systems. Automatica, v. 34, n. 6, p. 731739, 1998.
SILVA, J. Gomes da; LIMON, D.; ALAMO, T. Dynamic output feedback for discrete-time
systems under amplitude and rate actuator constraints. In: Proceedings of the 44th IEEE
Conference on Decision and Control and the European Control Conference 2005. Seville,
Spain: IEEE, 2005. p. 55885593.
STORN, R.; PRICE, K. Differential Evolution: a simple and efcient adaptive scheme
for global optimization over continuous spaces. Technical Report TR-95-012 - International
Computer Science Institute, 1995.
STORN, R.; PRICE, K. Differential evolution - a simple and ecient heuristic for global
optimization over continuous spaces. Journal of Global Optimization, v. 11, p. 341359, 1997.
SZNAIER, M. Norm based robust control of state-constrained discrete-time linear systems.
IEEE Transactions on Automatic Control, v. 37, n. 7, p. 10571062, July 1992.
SZNAIER, M.; DAMBORG, M. Suboptimal control of linear systems with state and control
inequality constraints. In: Proceedings of the 26th IEEE Conference on Decision and Control.
Los Angeles, CA: IEEE, 1987. v. 26, p. 761762.
SZNAIER, M.; SIDERIS, A. Suboptimal normbased robust control of constrained systems with
an H
cost. In: Proceedings of the 30th IEEE Conference on Decision and Control. Brighton,
UK: IEEE, 1991. p. 22802286.
TARBOURIECH, S.; BURGAT, C. Positively invariant sets for constrained continuous-time
systems with cone properties. IEEE Transactions on Automatic Control, v. 39, n. 2, p. 401405,
Feb. 1994.
Referncias 58
TUAN, D. H.; APKARIAN, P.; NAKASHIMA, Y. A new lagrangian dual global optimization
algorithmfor solving bilinear matrix inequalities. In: Proceedings of the 1999 American Control
Conference. San Diego, CA: IEEE, 1999.
VANANTWERP, J. et al. Globally optimal robust control of large scale sheet and lmprocesses.
In: Proceedings of the 1997 American Control Conference. Albuquerque, NM: IEEE, 1997. v. 3.
VASSILAKI, M.; BITSORIS, G. Constrained regulation of linear continuous-time dynamical
systems. Systems & Control Letters, v. 13, n. 3, p. 247252, 1989.
VESTERSTROM, J.; THOMSEN, R. A comparative study of differential evolution, particle
swarm optimization, and evolutionary algorithms on numerical benchmark problems. In:
Proceedings of the Congress on Evolutionary Computation. Portland, OR: IEEE, 2004. p. 1980
1987.
WILLEMS, J. Least squares stationary optimal control and the algebraic riccati equation. IEEE
Transactions on Automatic Control, v. 16, n. 6, p. 621634, 1971.
XIE, L. et al. Improved robust H
2
and H
ltering for uncertain discrete-time systems.
Automatica, v. 40, p. 873880, 2004.
ZAMES, G. Feedback and optimal sensitivity: Model reference transformations, multiplicative
seminorms and approximate inverses. IEEE Transactions on Automatic Control, v. 26, p. 301
320, 1981.
ZHAI, G.; TAMAOKI, K.; MURAO, S. Low-order H
controller design for discrete-time linear
systems. In: Proceedings of the 2002 American Control Conference. Anchorage, AK: IEEE,
2002. v. 3, p. 22022203.
ZHOU, K. et al. Mixed H
2
and H
performance objectives I: Robust performance analysis.
IEEE Transactions on Automatic Control, v. 39, n. 8, p. 15641574, 1994.
Вам также может понравиться
- Introdução À LógicaДокумент113 страницIntrodução À LógicaNojono88% (8)
- Max Scheler - A Situação Do Homem No Cosmos PDFДокумент31 страницаMax Scheler - A Situação Do Homem No Cosmos PDFWebertGS100% (3)
- Slide Estrategia Criminologia PCMG 1Документ58 страницSlide Estrategia Criminologia PCMG 1Roberta SantosОценок пока нет
- O Tempo Chegou!Документ254 страницыO Tempo Chegou!Ricardo Oliveira86% (7)
- Historias Que Um Jabuti Manual Do Professor Vol 3Документ57 страницHistorias Que Um Jabuti Manual Do Professor Vol 3Nanci HennichОценок пока нет
- Protocolos Fhemig 2010Документ368 страницProtocolos Fhemig 2010Natália LopesОценок пока нет
- Apostila Cartas de TiaNeivaДокумент134 страницыApostila Cartas de TiaNeivaamandaОценок пока нет
- Homologação Geral Das Inscrições de MonitoriaДокумент40 страницHomologação Geral Das Inscrições de MonitoriaJunior GomesОценок пока нет
- Python para Ciência de DadosДокумент11 страницPython para Ciência de DadosBrunoОценок пока нет
- Colaborar - Adg1 - Lógica ComputacionalДокумент4 страницыColaborar - Adg1 - Lógica Computacionaledson de castroОценок пока нет
- 2 - Avaliação Escolar PDFДокумент52 страницы2 - Avaliação Escolar PDFAugusto MedeirosОценок пока нет
- Captura de Ecrã 2023-05-18 À(s) 13.04.00Документ37 страницCaptura de Ecrã 2023-05-18 À(s) 13.04.00Joaquim jeremias JeremiasОценок пока нет
- Resumo Reflexivo DurkeimДокумент2 страницыResumo Reflexivo DurkeimdominguinhasОценок пока нет
- 0 - Urbanização No Mundo ContemporâneoДокумент2 страницы0 - Urbanização No Mundo ContemporâneoAllysson LimaОценок пока нет
- Para Que Estudar FilosofiaДокумент5 страницPara Que Estudar FilosofiaGédson SillasОценок пока нет
- FUPAPДокумент44 страницыFUPAPEli BorbaОценок пока нет
- Métodos de FlexnerДокумент6 страницMétodos de FlexnerMaria Alice da Nóbrega CarvalhoОценок пока нет
- Notas 1-A-Psicossociologia Das OrganizaçõesДокумент22 страницыNotas 1-A-Psicossociologia Das OrganizaçõesNelson De Virginia FerreiraОценок пока нет
- Revista - UFMG 19 Libre PDFДокумент244 страницыRevista - UFMG 19 Libre PDFCarla RodriguesОценок пока нет
- Modelo de Dados Semiestruturado XMLДокумент91 страницаModelo de Dados Semiestruturado XMLTiago MadrigarОценок пока нет
- Antõnio Davi de Oliveira Patrício, Francisco Adsom Bibiano Da SilvaДокумент3 страницыAntõnio Davi de Oliveira Patrício, Francisco Adsom Bibiano Da SilvaAdsom BibianoОценок пока нет
- David MACIEL 2016 Florestan Fernandes e o MarxismoДокумент12 страницDavid MACIEL 2016 Florestan Fernandes e o Marxismoalzenbach100% (1)
- Florestas Anãs Do Sertão - O Cerrado Na História Ambiental de Minas GeraisДокумент3 страницыFlorestas Anãs Do Sertão - O Cerrado Na História Ambiental de Minas Geraisleounb2014Оценок пока нет
- PPC Pedagogia PresencialДокумент148 страницPPC Pedagogia PresencialAnndreisa MonteiroОценок пока нет
- A Diversidade BiológicaДокумент37 страницA Diversidade BiológicailzoОценок пока нет
- Arte Da MeditaçãoДокумент132 страницыArte Da Meditaçãothiago27fОценок пока нет
- Vozes Da Historia Jose Gonalves Salvadorpdf PDF FreeДокумент206 страницVozes Da Historia Jose Gonalves Salvadorpdf PDF FreeClayton de MedeirosОценок пока нет
- Texto Aprendizagem - Sergio LunaДокумент32 страницыTexto Aprendizagem - Sergio LunaEndi CecciОценок пока нет
- Avaliação Metodologia Da Pesquisa CientíficaДокумент4 страницыAvaliação Metodologia Da Pesquisa CientíficaNatalia Almeida BeijosoОценок пока нет
- Planos de Aula ArgumentaçãoДокумент50 страницPlanos de Aula ArgumentaçãoErick TeixeiraОценок пока нет