Вам также может понравиться
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Infinique Structured Cabling Installation ChecklistДокумент2 страницыInfinique Structured Cabling Installation Checklistroot75% (4)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Sagana Kutus 132kv Transmission Line and SubstationДокумент324 страницыSagana Kutus 132kv Transmission Line and Substationshivvaram-1100% (1)
- Design and Evaluation of Inflatable Wings For UavsДокумент290 страницDesign and Evaluation of Inflatable Wings For UavsmegustalazorraОценок пока нет
- Guide To Petrophysical Interpretation PDFДокумент147 страницGuide To Petrophysical Interpretation PDFDwiandaru DarmawanОценок пока нет
- Procedures For Solar Electric (Photovoltaic Abbreviated As PV) System Design and InstallationДокумент5 страницProcedures For Solar Electric (Photovoltaic Abbreviated As PV) System Design and InstallationUmamaheshwarrao VarmaОценок пока нет
- Fortranv 7Документ173 страницыFortranv 7mu4viewОценок пока нет
- O&M TransformerДокумент47 страницO&M TransformerAshish PatelОценок пока нет
- Const Estimate Made EasyДокумент31 страницаConst Estimate Made EasyLorenzo SerranoОценок пока нет
- Conformity Assessment For The Execution of Steel & Aluminium StructuresДокумент14 страницConformity Assessment For The Execution of Steel & Aluminium StructuresJevgenijsKolupajevsОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)msejjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)msejjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)msejjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)msejjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)msejjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)msejjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)msejjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)ijfcstjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)msejjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)ijbissОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)ijfcstjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)ijfcstjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)ijbissОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)ijbissОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)msejjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)ijbissОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)msejjournalОценок пока нет
- International Journal On Foundations of Computer Science & Technology (IJFCST)Документ2 страницыInternational Journal On Foundations of Computer Science & Technology (IJFCST)ijbissОценок пока нет
- IJFCSTДокумент2 страницыIJFCSTijfcstjournalОценок пока нет
- 24 - Article - $mbps Vs $MHZ Why Is This ImportantДокумент2 страницы24 - Article - $mbps Vs $MHZ Why Is This ImportantShiraz SiddiqОценок пока нет
- Magnum Dxi13 Engine Torque Settings PDFДокумент67 страницMagnum Dxi13 Engine Torque Settings PDFbuchniyОценок пока нет
- Av36d303 SchematicДокумент30 страницAv36d303 SchematicLuis MorenoОценок пока нет
- bt2505b Bluetooth PhilipsДокумент2 страницыbt2505b Bluetooth Philipsgursharan singh GSGОценок пока нет
- Inspection & Maintenance of Dams: Dam Safety GuidelinesДокумент79 страницInspection & Maintenance of Dams: Dam Safety Guidelinesvishu1909100% (1)
- Applied Hydrology LabДокумент6 страницApplied Hydrology Labshehbaz3gОценок пока нет
- 1-A - York Shipley Global General BrochureДокумент6 страниц1-A - York Shipley Global General BrochureUzair WahidОценок пока нет
- Comb - Chemkin - Format PDFДокумент5 страницComb - Chemkin - Format PDFMUHAMMAD FAREEZ IZWAN BIN ABDUL JALILОценок пока нет
- ProeДокумент160 страницProejohn100% (1)
- 2 TensionДокумент28 страниц2 TensionRICKY IVANОценок пока нет
- Pompa WarmanДокумент2 страницыPompa WarmanRahmad Saleh SiregarОценок пока нет
- DsPIC33F - 01 - IntroductionДокумент8 страницDsPIC33F - 01 - IntroductionLau SandovalОценок пока нет
- Copeland Scroll Compressors For Refrigeration Zs09kae Zs11kae Zs13kae Application Guidelines en GB 4214008Документ24 страницыCopeland Scroll Compressors For Refrigeration Zs09kae Zs11kae Zs13kae Application Guidelines en GB 4214008Cesar Augusto Navarro ChirinosОценок пока нет
- A Curvature Compensated CMOS Bandgap Voltage ReferenceДокумент4 страницыA Curvature Compensated CMOS Bandgap Voltage ReferenceMuhammad_Swilam_2010Оценок пока нет
- Types of PatternДокумент12 страницTypes of PatternadamОценок пока нет
- DMPCДокумент49 страницDMPCiprassandyОценок пока нет
- AccuGard Instructions GB ESP PT GRДокумент6 страницAccuGard Instructions GB ESP PT GRCarles SanchezОценок пока нет
- SAI GLOBAL, Index House, Ascot, Berks, SL5 7EU, UKДокумент73 страницыSAI GLOBAL, Index House, Ascot, Berks, SL5 7EU, UKtracyhopyОценок пока нет
- WBNR La Auto BCM SpanishДокумент41 страницаWBNR La Auto BCM SpanishHaragopal KrishnaОценок пока нет
- A Review of Power Electronics Based Microgrids: Josep M. Guerrero, Xiongfei Wang, Zhe Chen, and Frede BlaabjergДокумент5 страницA Review of Power Electronics Based Microgrids: Josep M. Guerrero, Xiongfei Wang, Zhe Chen, and Frede BlaabjergSaksham GuptaОценок пока нет
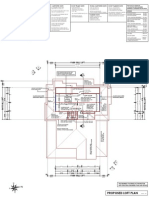
- LoftplanДокумент1 страницаLoftplanapi-228799117Оценок пока нет