Академический Документы
Профессиональный Документы
Культура Документы
Poli Past Os
Загружено:
JCh DiazАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Poli Past Os
Загружено:
JCh DiazАвторское право:
Доступные форматы
16
Captulo 2 Marco Terico
Antecedentes
No se encontraron antecedentes de proyectos similares realizados en la UNET; sin embargo se presentan las siguientes referencias:
A nivel Internacional se tiene: Prez (2005), en Colombia, present un ensayo titulado Automatizacin de un puente gra a escala, mediante una plataforma embebida la cual soporta multiprogramacin. El artculo inicia con una breve descripcin del modelo construido de puente gra, luego se plantea una arquitectura base para su automatizacin sobre un sistema embebido el cual soporta multiprogramacin. Finalmente se desarrollan algoritmos de aplicacin sobre el sistema los cuales tienen la particularidad de utilizar primitivas del sistema operativo implementado, permitiendo as generar aplicaciones de multiprogramacin sobre el puente gra en tiempo real. Se concluy que: la utilizacin de un sistema operativo sobre una plataforma embebida facilita la implementacin de algoritmos de control sobre esta; La ventaja principal en el uso de un sistema operativo es la abstraccin del hardware que realiza este, permitiendo al diseador implementar algoritmos de control en lenguaje de alto nivel y a su vez proporcionndole primitivas del sistema las cuales facilitan el desarrollo de algoritmos; Aunque el sistema es robusto el grado de exactitud de posicionamiento est sujeto al tipo de sensores utilizados.
17
El anterior trabajo, da una idea del procedimiento a seguir para la construccin de un prototipo de gra puente con el cual se logran realizar las pruebas necesarias para corroborar en forma experimental las interfaces creadas. A nivel Nacional, se resea el siguiente antecedente: Soto (2007), realiz un trabajo de investigacin denominado Ingeniera Conceptual para la implementacin del Sistema de Control para el conjunto: traslacin e izaje en las gras puente de TERNIUM-SIDOR. Se realiz un sistema de control a travs de controladores AC y rels programables, cumpliendo con las exigencias en cuanto a supervisin, sealizacin, paradas de emergencia, validacin de entradas, manejando as las referencias, sensores de campo, y lmites establecidos para tener un sistema confiable y eficiente. En cuanto a los requerimientos de seguridad, con ste trabajo se consigui cumplir con las premisas de seguridad industrial para los procesos de izaje principal y auxiliar, concluyendo que se pueden colocar en los ejes de los motores un encoder para realizar un control a circuito cerrado con el que se logra tener conocimiento de la posicin de la bobina y as manejando esta informacin, evitar posibles accidentes e incidentes por fallos en los sensores de campo para el trabajo en condiciones lmites. El anterior trabajo, es utilizado para orientar en el proceso de seleccin de posibles sensores a nivel industrial segn el ambiente en el que se desenvuelva una empresa cualquiera, en este caso tomando como referencia TERNIUM-SIDOR.
A nivel Nacional, se tiene: Casanova (2009), efectu un trabajo denominado I mplementacin de una plataforma de teleoperacin a travs de internet para aplicaciones en entrenamiento industrial. Con este proyecto se cre una plataforma donde se permiti a un
estudiantado, interactuar con un proceso a travs de una cmara la cual contiene un motor de corriente continua (DC) para facilitar el desplazamiento, este se control a travs de un canal de salida PWM (Modulacin de ancho de pulso) de un PLC. La
18
interfaz se realiz en LabVIEW a travs del datasocket para la transmisin de los respectivos datos. Dicho trabajo, se tom como base para la configuracin del MODBUS de LabView el cual permiti realizar la comunicacin de los datos entre el PLC y la PC. Introduccin a la Gra Puente
El puente gra es un tipo de aparato de elevacin compuesto por una viga, simple o doble, biapoyada sobre dos carriles elevados sobre unos postes, dispuestos a tal efecto o componentes de la estructura resistente de la nave o edificacin. El movimiento longitudinal se lleva a cabo mediante la translacin de la viga principal o puente a travs de los carriles elevados. En la prctica totalidad de los casos, la rodadura es por ruedas metlicas sobre carriles tambin metlicos. El movimiento transversal se realiza mediante el desplazamiento de un polipasto o carro sobre uno o dos carriles dispuestos sobre la viga principal. Como en el caso anterior la rodadura es para todos los casos de tipo acero-acero. El movimiento vertical se ejecuta a travs del mecanismo de elevacin; polipasto o carro.
Mecanismo de Elevacin La eleccin del mecanismo de elevacin de un puente gra es en funcin de la capacidad de carga y de la luz del puente gra.
1. El polipasto monorral Este mecanismo de elevacin se caracteriza por su constitucin en lnea y por su tendencia hacia el mnimo peso propio. La estructura resistente est formada por las propias carcasas de los mecanismos de
19
acondicionamiento, reduccin y elctricos. Se compone de las partes mostradas en la figura 1.
Figura 1. Partes de un polipasto monorral
Lgicamente, este tipo de mecanismo cubrir el campo de aplicacin de manutencin de cargas bajas. La translacin a lo largo de la viga principal es de tipo manual debido al reducido peso propio de polipasto y al bajo nivel de la carga a elevar.
2. El carro polipasto Se utiliza para la manutencin de cargas a nivel intermedio. Sus caractersticas principales son la simplicidad del polipasto y la rodadura sobre dos carriles que le permite la elevacin del nivel de carga. Para este mecanismo de elevacin, la estructura resistente est compuesta por uno o dos travesaos en los cuales apoya todos los mecanismos de elevacin, accionamiento o translacin, si existe. As mismo lleva uno o dos largueros
20
donde apoyan los rodillos de rodadura. La translacin puede ser manual o elctrica. 3. El carro abierto Es el mecanismo de elevacin de cargas elevadas, por excelencia. Su estructura resistente, robusta, es capaz de soportar las fuertes cargas verticales y de transmitir los esfuerzos generados por la carga til a los rodillos de rodadura. En un carro existen los siguientes elementos: a. Mecanismos de elevacin compuesto por aparejo mvil, tambor de cable, polea de compensacin, reductor, freno y motor de accionamiento. b. Mecanismo de translacin del carro compuesto por ruedas, reductor, freno motor de accionamiento. c. Estructura resistente. Con objeto de compensar errores geomtricos en el montaje, se disponen de acoplamientos elsticos entre el motor y los elementos montados sobre el carro.
Normalmente, en un carro, existen dos velocidades de elevacin: velocidad de elevacin principal y velocidad de precisin. En algunos casos, existe tambin una elevacin auxiliar para las cargas ligeras.
4. Clculo del Bastidor El bastidor de un carro abierto presenta el siguiente esquema (ver figura 2):
21
Figura 2. Esquema de bastidor de carro abierto; A: Mecanismo de elevacin, B: Mecanismo de translacin, C: Tambor, D: Rodillos, E: Polea de compensacin
Inicialmente, se calculan los esfuerzos sobre el bastidor generados por la carga til existente sobre el tambor. Estos esfuerzos estn localizados en los puntos F1 y F2. As mismo, la polea de compensacin transmite al bastidor unos esfuerzos en los puntos F3, F4, F5 y F6. Debido a la accin del cable que abraza la citada polea. Con arreglo a los esfuerzos citados, es posible calcular los largueros y travesaos, como vigas apoyadas en los diferentes rodillos de rodadura y cargados puntualmente.
5. Eleccin de La Velocidades de Elevacin Es frecuente que los mecanismos de elevacin de los puentes gra incorporen dos velocidades de elevacin con objeto de obtener el mximo rendimiento en las operaciones de ascenso y descenso de la carga. Ambas velocidades se suelen denominar como velocidades de elevacin principal y velocidades de precisin. Ambas velocidades son funcin de la velocidad de carga, de la distancia vertical mxima que puede recorrer la carga, del grupo de carga y de la clase de elevacin (ver tabla 1).
22
Capacidad de carga (T)
Elevacin de precisin Distancia vertical Elevacin principal (m/min) mxima (m/min) (m) 0,5 3 15 4 1 5 1.25 5,5 8 2 11 2 3.5 5 0,5 7 10 1 5 3,5 48 0,4 7 12 0.8 8 1,2 8 3.5 5 0,5 12 1,2 12 10 3,5 4 0.4 16 6 4 0.6 20 6 5 0.5 25 6 6 0.6 Tabla 1. Velocidad de elevacin de un puente gra de clase de elevacin 2, grupo de carga 2.
6. Eleccin de las Velocidades de Translacin Existen ocasiones donde las velocidades de translacin constituyen un dato fijo en el clculo de la instalacin del puente gra. En el resto de los casos, existe un camino abierto a la optimizacin con vistas a obtener el mximo rendimiento de manutencin. La velocidad de translacin del mecanismo de elevacin (polipasto o carro), va a ser una funcin lineal de la luz de la gra, segn la grfica mostrada en la figura 3.
Figura 3. Grfica de velocidad de translacin del mecanismo de elevacin
23
Cables A la hora de seleccionar la estructura del cable, el principal problema que se presenta es determinar cul es la accin ms importante y la que marcar el lmite de vida del cable. A modo de orientacin, se presenta la siguiente tabla (tabla 2):
Trabajo del cable Cable resistiendo principalmente
Caractersticas de la estructura Cable grueso. Alambre de mucha resistencia. Alma metlica. Cable de alambres exteriores gruesos. Alambre de mucha resistencia. Cableado Lang. Cable de alambres delgados.
esfuerzos de extensin.
Cable resistiendo principalmente a la abrasin.
Cable
resistiendo
principalmente Alambres de baja resistencia. Muchos alambres por cordn. Cableado Lang y preformacin. Cable grueso.
esfuerzos de encurvacin.
Cable
resistiendo
principalmente
Pocos alambres por cordn. Cableado Cruzado. Alma metlica. Cordoneado paralelo.
esfuerzos de estrepada y aplastamiento.
Tabla 2. Gua de determinacin del tipo de estructura de cable.
El coeficiente de seguridad depende del lmite del acero empleado y las condiciones de la instalacin. Existen normas que marcan los coeficientes y normas de clculo segn la aplicacin a que se destine el cable. A modo de orientacin se presenta la tabla 3:
24
Coeficientes de Seguridad Cables fijos, de puentes colgantes Cable carriles para telefricos Cables tractores para telefricos Cables de labor, elevacin y guas Cables para instalaciones importantes Cables para transporte de personal Cables para planos inclinados Cables para pozos de extraccin Cables para ascensores Cables para cabrestantes y trenajes Cables para montacargas
Tabla 3. Determinacin de coeficiente de seguridad
3-4 3-5 5-7 5-9 8 - 12 8 - 12 5-8 8 - 12 12 - 22 4-6 8 12
En cuanto a los cables ms utilizados en puentes gra, gras prtico y gras consola se tiene en la tabla 4:
Dimetro de utilizacin 8 a 25 mm. 10 a 30mm.
Composicin del cable 6 x 19 (1+6+12) + 1 alma textil 6 x 37 (1+6+12+18) + 1 alma textil 6 x 36 (1+7+7.7+14) W.S. + 1 alma textil 6 x 61 (1+6+12+18+24) + 1 alma textil 6 x 54 (1+6+9+9.9+18) W.S. + 1 alma textil
20 a 40 mm.
Tabla 4. Descripcin de cables ms utilizados
25
Tambores (Polipastos) Los tambores de cables han de calcularse de modo que en la posicin ms alta del medio de transporte no pueda arrollar ms capas de cable que las previstas. Se pueden dividir los tambores de elevacin en dos grandes grupos:
De una capa: el cable, normalmente ranurado, se enrolla slo en una capa. Son los tambores que generalmente se montan en los aparatos de elevacin. De varias capas de cable: El cable se arrolla en capas sucesivas, normalmente son lisos. Utilizados slo en tambores de obras pblicas, en las cuchara mecnicas y en los tambores de almacenamiento que se encuentran detrs de las poleas de friccin.
Segn las reglas de Gosgortejnador, los bordes de los tambores deben sobresalir por encima de la capa superior del cable arrollado no menos de dos dimetros del cable y los bordes de los tambores lisos para cadenas soldadas, no menos de la anchura del eslabn de la cadena. Los tambores se fabrican generalmente, bien en fundicin de hierro, de acero fundido, o en construccin de chapa de acero soldada.
Los tambores son accionados directamente o, en el caso de grandes tambores mediante corona dentada. La longitud de los tambores debe ser tal que en la posicin inferior del gancho queden al menos 1.5 (es preferible de 2 a 3) espiras muertas, a fin de que refuercen la fijacin del cable e impidan que la carga quede colgando directamente de sta.
En la figura 4 se muestra el carro de una gra portacontenedores:
26
Figura 4. Carro de una gra portacontenedores
Equipo Elctrico
La energa elctrica es la ms empleada en el accionamiento de mquinas de elevacin. Los equipos empleados difieren bastante de los habituales, debido a varios factores. La variedad de las cargas que se deben elevar es grande. Las condiciones de trabajo son muy diferentes en la subida y en la bajada y adems se debe variar la velocidad de desplazamiento. Otras caractersticas de los equipos empleados en mquinas de elevacin, son la necesidad de disponer elementos de seguridad para evitar un manejo inadecuado de la carga y el poder funcionar casi sin interrupcin.
1. Motores Los motores elctricos empleados en mquinas de elevacin son, en su mayora, trifsicos asncronos de anillos rozantes. En algunos casos se emplean motores en corto y de corriente continua. Los motores sncronos estn limitados a usos muy especiales, con grandes potencias y regulacin electrnica compleja. En cualquier caso son motores de construccin especial, con zunchos y refuerzos en las bobinas para soportar los altos esfuerzos mecnicos.
27
1.1. Motores de corriente continua Los motores de corriente continua se emplean cuando es necesario un margen amplio de regulacin de velocidad o cuando la potencia supera los 200 KW. En este caso se desaconseja el uso de mquinas trifsicas por la necesidad del uso de contactores para el control, ya que tienen poca vida con las intensidades producidas. Con motores de corriente continua se pueden alcanzar velocidades en el margen de 3 a 5 veces la nominal, pero el motor ha de ser especialmente construido para ser estable en esa zona. En muy pocas aplicaciones se supera la relacin 1:3 y la mayora de las instalaciones funcionan con valores entre 1:2 y 1:2.5. Estos valores garantizan la ausencia de problemas de conmutacin. En cualquier caso no conviene superar las 2000 r.p.m.
1.2. Motores trifsicos Son los ms empleados. Su velocidad de sincronismo depende del nmero de pares de polos (p): n: r.p.m. f: ciclos/seg.
Coincide con la velocidad de giro de los motores sncronos. En los asncronos es 5 6% inferior y vara con la carga. Esta velocidad de giro es muy elevada y se debe colocar un reductor para aprovechar el movimiento.
1.2.1. Motores Asncronos De anillos rozantes: Puede ser regulada su velocidad por medio de resistencias rotricas o por equipos electrnicos. El margen de velocidad obtenidos es inferior al conseguido con motores de corriente continua, pero son ms baratos,
28
compactos y fiables. El par mximo o par de calado es 2.5 a 3 veces el par nominal. De colector: Pueden ser regulados decalando a mano las escobillas. Estn totalmente fuera de uso. De jaula de ardilla: Se emplean en polipastos, puentes gras pequeos, traslacin de puentes, etc. Slo se emplean en accionamientos de poca potencia. Se conectan sin ningn tipo de regulacin. Solo en traslacin de puentes y prticos se instalan arrancadores. Si se quisiera regular la velocidad, se debera recurrir a un convertidor esttico. Se construyen motores especiales (de ranura profunda, de jaula doble, etc.) que dan un par de arranque de 1.6 a 2.5 veces el par nominal. Al calcular los motores de jaula se deben sobredimensionar, pero evitando el exceso de potencia que origine el arranque brusco. La aceleracin no debe sobrepasar 0.6 m/s2 en movimientos de elevacin 0.3 m/s2 en movimientos horizontales.
2. Clculo de la potencia necesaria Este clculo corresponde al tcnico mecnico, ya que es l quien conoce el par necesario para el accionamiento as como los rendimientos de las transmisiones. En la tabla 5 se encuentran los valores empleados por la AEG (Asociacin de Electricidad General). Los empleados por el resto de arcas son idnticos, aunque muchos introducen una frmula adicional para el clculo de la potencia necesaria para vencer la accin del viento. El clculo es independiente del tipo de motor y regulacin empleados.
29
Pos. 1
Tipo gra Gras de almacn Gras de taller Gras de casas de mquinas Gras de ferrocarriles Gras flotantes Gras de a bordo Gras pesadas de montaje y del taller, ms de 5 toneladas de peso de elevacin Gras para obras y construcciones
Mecanismos Elevacin Traslacin carro Traslacin gra Giro
E.D. relativo S 3% 25 25 25 40 25
Frecuencia conexin c/h. 150
Elevacin Traslacin carro Traslacin gra Elevacin Giro Traslacin Traslacin carro Elevacin Giro Traslacin Elevacin Cerrar Giro Traslacin Elevacin Cerrar Traslacin carro Traslacin puente Giro Elevacin Traslacin carro Traslacin gras
40 25 25 40 40 60 40 40 40 40 40 25 40 60 40 40 25 40 60 60 60 25 40 40 40 40 60 40 60 40 60 60 60 60 60 60
150
150
Gras para bultos Gras flotantes y del puerto Gras de puerto con mordazas
150
150 hasta 300 150
Puente de carga
Gras ligeras para empresas siderrgicas
300
Gras pesadas para enpresas siderrgicas Gras para Elevacin fundicin Gras mezcladas Gras de garras Traslacin carro Traslacin gra Giro Gras "Stripper" (para sacar los lingotes de los moldes) Gras para hornos de foso Gras para hornos de pala mvil Gras para fraguas Elevacin Giro Traslacin carro Traslacin gra Elevacin lingotes Tenazas
300
300 hasta 600
Tabla 5. Gras, Mecanismos y Coeficientes de seguridad en cuanto a polvo y agua
30
Eleccin del Motor
1. Potencia del motor En general se debe procurar que el par resistente mximo no supere el 80% del par mximo que puede dar el motor y que la potencia nominal de ste sea mayor o igual que la potencia efectiva que demanda el accionamiento. 2. Tipo de motor El tipo se selecciona segn el movimiento a realizar, la potencia, el margen de velocidades necesario y el ndice de utilizacin. Los motores de corriente continua se emplean en elevaciones y giros, con potencias elevadas e ndices de utilizacin altos. Son imprescindibles para grandes mrgenes de regulacin. Los motores de jaula se emplean en traslaciones de puentes o prticos. Tambin se emplean en elevaciones de poca potencia sin variacin de velocidad. Para variar la velocidad se recurre a trasmisiones hidrulicas (A.2) o a regulacin electrnica en el estator. Los motores ms usados son los de anillos rozantes. El tipo de regulacin vara segn el tipo de accionamiento. 3. Tipos de servicio Cada motor elctrico est sometido a un rgimen de conexiones y desconexiones que influyen en su calentamiento. Estos regmenes se agrupan en tipos de servicio segn VDE 0530 1/1.69, 8 y son un dato ms para la eleccin en catlogo del motor. En las mquinas de elevacin, los motores asncronos de anillos rozantes trabajan con servicio S 3 (servicio intermitente sin influencia del arranque en la temperatura) y los de corriente continua con servicio S 5 (servicio intermitente con influencia del arranque y del frenado en la temperatura). En la prctica, los motores de comente continua se calculan con servicio S 3, ya que la diferencia de comportamiento trmico no es excesiva.
31
4. Factor de marcha El factor de marcha est definido por la siguiente frmula:
En la Tabla 6 estn detallados el factor de marcha y el nmero de conexiones por hora para diferentes mquinas de elevacin. El nmero de conexiones por hora no influye en el clculo del motor, pero si influye en el clculo de contactores.
5. Forma constructiva Al seleccionar el motor se debe comprobar que se puede colocar en el sitio previsto para l. Para esto debe ser de tamao contenido y de forma adecuada. Los motores ms usados son los de las formas B3 (con patas) y los de la forma B5 (sin patas), formando stos un conjunto muy compacto con los reductores.
6. Protecciones Los motores estn protegidos del ambiente exterior en diverso grado. El grado de proteccin se indica con dos cifras. La primera indica el grado de proteccin contra el polvo y la penetracin de contactos extraos. La segunda indica el grado de proteccin contra la penetracin de agua.
32
En algunos motores (franceses sobre todo) aparece una tercera cifra que indica la proteccin contra golpes y choques (norma UTE 20010). Los tipos de proteccin indicados son DIN 4050 y CEI 144 y 525. En motores en el interior de naves (puentes-gras, gras-cartela, etc.) se aplica una proteccin IP 23. En algunos se aplica IP 33 o IP 44 en la caja de bornas. IP 23: Proteccin contra contactos con los dedos y contra slidos de tamao medio. Proteccin contra agua de aspersin en sentido vertical o inclinada 60 respecto a la vertical. IP 44: Proteccin absoluta contra contactos y contra cuerpos extraos granulados. Proteccin contra salpicaduras de agua en todas direcciones.
En motores al aire libre (gras de puerto, de astillero, de contenedores, etc.) se aplica IP 44 o IP 54, protegindose las cajas de bornas con IP 55 o IP 56. IP 55: Proteccin absoluta contra contactos y contra la acumulacin de polvo. Proteccin contra chorros de agua.
7. Eleccin del motor en catlogo Cada fabricante indica en sus catlogos el mtodo de eleccin, pero todos clasifican sus motores en tablas ordenadas segn el tipo de servicio, la potencia necesaria para el accionamiento y el factor de marcha (% ED). Para cada modelo se indican las formas constructivas y las protecciones disponibles. Las dems formas y protecciones se pueden conseguir, aunque no siempre, bajo pedido.
Acoplamientos y Embragues Los acoplamientos son aparatos que permiten transmitir un par determinado entre una parte conductora y otra conducida, unidas ambas por medio de unos
33
elementos. Dependiendo de la naturaleza de estos elementos tendremos acoplamientos rgidos, elsticos, semi-elsticos y flexibles.
1. Eleccin de un Acoplamiento
Las caractersticas que define a un acoplamiento es el par que puede transmitir en condiciones ideales de funcionamiento, o sea con un arranque suave y en vaco, sin sobrecargas y con velocidad uniforme.
En la tabla 6 vienen indicados los valores del coeficiente de seguridad k para los motores y mquinas utilizados normalmente y clasificados segn sus caractersticas. Para determinar el acoplamiento apropiado a un caso concreto y una vez calculado el par que debe transmitir (multiplicado por el coeficiente de seguridad correspondiente) se escoge en la tabla de caractersticas el modelo que tenga un par igual o inmediatamente superior al calculado, comprobando finalmente si sus dimensiones permiten adaptarle a los ejes que se trata de acoplar.
MOTOR MQUINA Inercia pequea y sin choques Ventiladores, bombas rotativas, etc. Inercia media y sin choques Transportadores, hormigoneras, etc. Inercia media y con choques Dinamos, alternadores, gras, cabrestantes, etc. Inercia grande y con choques fuertes Molinos, laminadores, compresores, etc. Turbinas Motor hidrulicas y de elctrico vapor 1,25 1,75 2,25 1,75 2,25 2,75 Motor diesel 6 o ms cilindros 1,75 2,25 2,75 3y4 ly2 cilindros cilindros 2 2,5 3 2,5 3 3,5
3,25
3,75
3,75
4.5
Tabla 6. Coeficiente de seguridad k para motores y mquinas utilizados normalmente
34
2. Limitadores de esfuerzo Los limitadores de esfuerzo protegen los rganos de transmisin contra las sobrecargas que podran provocar su rotura, debido a que limitan el par transmitido. Durante el servicio es necesario que el par transmitido pueda ser regulado con precisin y que no vare. El par vara mucho segn la lubricacin de las superficies en contacto, por ello se prefieren los limitadores de esfuerzotrabajando en seco, provistos de una guarnicin de freno ya que el coeficiente de friccin slo vara entre lmites muy prximos. Los limitadores de esfuerzo pueden posteriormente convertirse en los frenos de disco, de bandas o de zapatas del sistema. No se debe sobrecalentar salvo que dicho limitador de esfuerzo patine durante un largo tiempo. La regulacin de estos limitadores se realiza para el par de aceleracin del mecanismo y nunca para el par nominal del motor.
3. Embragues Los embragues se utilizan en los aparatos de elevacin para cambiar la relacin de velocidades o para embragar los movimientos con un motor de marcha continua como puede ser un motor trmico. Se observa una tendencia cada vez mayor a utilizar medios mecnicos, como en este caso los embragues, para realizar la variacin de velocidad. La finalidad bsica de la utilizacin de embragues es permitir que durante la aceleracin de motores asncronos el arranque se haga prcticamente en vaco. De esta manera las corrientes altas que caracterizan el arranque de estos motores tienen una duracin mnima, con evidentes ventajas para la lnea de alimentacin y para el motor, consiguiendo que el motor pueda alcanzar su par mximo con velocidades descendentes, en lugar de hacerlo con velocidades crecientes, como es el caso en un arranque normal, sin embrague.
35
Las curvas de comparacin del par y de la comente del motor, sometido al arranque de una carga utilizando un embrague se muestran en la figura 5, en ellas se observa que el par resistente esttico es mayor que el par de arranque del motor. Adems, observando la figura se ve que durante todo el proceso de aceleracin de la carga, la corriente permanece aproximadamente alrededor de su valor nominal. El uso del embrague es uno de los medios ms aconsejables para el arranque de motores asncronos cuando se deben acelerar cargas con inercias grandes. Los embragues se utilizan tambin para el control de velocidad del sistema y adems la mayora de los tipos de embragues utilizados en accionamientos sirve como amortiguador a los transitorios de carga. Existe gran variedad de embragues siendo los ms utilizados en los aparatos de elevacin y transporte los siguientes: Embragues de tetones. Embragues de friccin. Embragues sin posicin de descenso libre Embragues centrfugos Embragues por corrientes d Foucault. Embragues d fluido magntico. Embragues hidroviscosos. Embrague hidrcintico.
Par motor, % del nominal
Tiempo
Figura 5. Curva de par y corriente de un motor elctrico que acciona una carga mediante un embrague ideal.
36
Frenos
1. Actuadores elctricos Para vencer la fuerza del resorte de freno y levantar la cinta o las zapatas se emplean actuadores. Pueden ser elctricos o mecnicos. Muchas veces llevan incorporado el resorte en su interior. En los actuadores elctricos hay que distinguir dos tipos: por electroimn y electrohidrulicos. En el primer tipo un electroimn genera la fuerza suficiente para vencer el resorte que mantiene aplicadas las zapatas. El electroimn puede ser alimentado con comente continua o con comente alterna. En el caso de ser alimentado con alterna se producen picos de comente de 6 a 8 veces la nominal cuando se cien-a el circuito. Por esto se prefiere alimentar al freno con corriente continua aunque se deba instalar un puente rectificador. En el caso de alimentar el freno con comente alterna es preferible emplear actuadores tipo Eldro (Figura 6). Este actuador consta de un motor de jaula de ardilla (1), cuyo sentido de giro es independiente del orden de conexin de las fases, una turbina movida por el motor (2) y un pistn lleno de aceite. La presin creada por la turbina empuja al eje (3). Al cesar la presin el eje vuelve a su sitio por efecto del muelle antagonista (5). Este muelle no es el resorte que acciona el freno. Los actuadores Eldro tienen otras aplicaciones sobre todo en posicionamiento. Existen tipos especiales (con vlvula de retardo de descenso, etc.). Pueden ser regulados variando la tensin de alimentacin.
37
5 4
3 2
Figura 6. Actuador tipo Eldro.
2. Frenos electromecnicos 3.1. Frenos de cinta Constan de una banda de acero de 2 a 5 mm. de espesor y de 70 a 150 mm. De ancho guarnecida con un Ferodo. Esta cinta se enrolla sobre una polea de 200 a 750 mm. de dimetro, con un arco de contacto de 250. La cinta se acciona por medio de un Eldro de forma que sea indiferente el sentido de rotacin. En movimientos de elevacin se monta de forma que el frenado sea ms efectivo en el sentido del descenso. Estos frenos estn en desuso debido a los desajustes causados por el mal reparto de tensiones mecnicas. Slo son usados, como freno de seguridad complementaria, en la elevacin de la pluma en gras portacontenedores de gran tamao.
38
En una gra portacontenedores el nico fallo que nos puede tirar abajo la gra es la rotura de los dientes del reductor de la elevacin de la pluma. En caso de producirse este fallo la pluma caera a gran velocidad. Como pesa 60 Tm podra volcar la gra hacia delante. Para evitar esto se pone una vigilancia electrnica por medio de un captador inductivo. Si la velocidad de la pluma supera un cierto valor, cae el freno de cinta. En una operacin normal el freno de cinta se abre al comenzar el movimiento y se cierra con un retardo respecto a la parada. Esto se hace para evitar las tensiones que se produciran en el reductor si el freno de cinta cayese un momento antes de la parada. El freno de cinta se monta sobre el tambor donde se enrolla el cable. Existe adems un freno normal de mordazas.
3.2. Frenos de mordazas Estos son, con gran diferencia, los frenos ms usados en aparatos de elevacin de tipo mediano y grande. Dentro de este tipo de frenos podemos distinguir entre los frenos de electroimn y los frenos accionados por Eldro. El electroimn puede ir montado directamente sobre las mordazas o actuar por medio de una palanca. El Eldro es ms usado y acta por medio de palancas con distintas configuraciones.
3.3. Frenos de disco Los frenos de disco empleados en aparatos de elevacin constan de un disco de acero, una pinza con dos bombines en oposicin y una central hidrulica accionada por un motor elctrico. Se suelen emplear formando conjuntos compactos con los motores. Estos conjuntos tienen aplicacin en los aparatos de elevacin en cubierta de barcos, ya que son perfectamente estancos a los golpes de mar.
39
3.4. Frenos Cnicos Son usados en motores Demag-Conz. El rotor del motor es de forma cnica y encaja con el freno. Al conectar el motor se comprime el resorte del freno y se desbloquea el rotor. Al desconectar la corriente, el freno acta directamente sobre el rotor.
3.5. Frenos de traslacin En gras portacontenedores de gran tamao se emplean frenos de traslacin adicionales para evitar que la gra se desplace por efecto del viento. Estos frenos son con zapatas sobre el carril o con garras aplicadas a los bordes del carril. En ambos casos se emplean actuadores Eldro. Para el estacionamiento se hacen cuatro huecos en el suelo y se encajan en ellos cuatro bulones, uno por pata. Estos bulones se suelen colocar a mano.
Motores DC
Figura 7. Algunos modelos de motores DC
40
En la figura 7 se observan algunos clsicos micro motores DC (Direct Current) o tambin llamados CC (corriente continua) de los usados generalmente en robtica. Los hay de distintos tamaos, formas y potencias, pero todos se basan en el mismo principio de funcionamiento.
Accionar un motor DC es muy simple y solo es necesario aplicar la tensin de alimentacin entre sus bornes. Para invertir el sentido de giro basta con invertir la alimentacin y el motor comenzar a girar en sentido opuesto.
A diferencia de los motores paso a paso y los servomecanismos, los motores DC no pueden ser posicionados y/o enclavados en una posicin especfica. Estos simplemente giran a la mxima velocidad y en el sentido que la alimentacin aplicada se los permite.
El motor de corriente continua est compuesto de 2 piezas fundamentales: 1. Rotor (ver figura 8). 2. Estator (ver figura 9).
Figura 8. Rotor de un motor DC
41
Figura 9. Estator de un motor DC
Dentro de stas se ubican los dems componentes como: 1. 2. 3. 4. 5. 6. 7. Escobillas y porta-escobillas Colector Eje Ncleo y devanado del rotor Imn Permanente Armazn Tapas o campanas
Tabla de Estructura En la tabla 7, se muestra la distribucin de las piezas del motor: ROTOR Eje Ncleo y devanado Colector Armazn Imn permanente Escobillas y portaescobillas Tapas
Tabla 7. Elementos rotor y estator de un motor DC
ESTATOR
1. Rotor: Constituye la parte mvil del motor, proporciona el torque para mover a la carga. Est formado por:
42
1.1. Eje: Formado por una barra de acero fresada. Imparte la rotacin al ncleo, devanado y al colector. 1.2. Ncleo: Se localiza sobre el eje. Fabricado con capas laminadas de acero, su funcin es proporcionar un trayecto magntico entre los polos para que el flujo magntico del devanado circule.
Figura 10. Primera parte de un rotor de motor DC
En la figura 10, se muestran algunas partes de un rotor de motor DC. Las laminaciones tienen por objeto reducir las corrientes parsitas en el ncleo. El acero del ncleo debe ser capaz de mantener bajas las prdidas por histresis. Este ncleo laminado contiene ranuras a lo largo de su superficie para albergar al devanado de la armadura (bobinado).
1.3. Devanado: Consta de bobinas aisladas entre s y entre el ncleo de la armadura. Estas bobinas estn alojadas en las ranuras, y estn conectadas elctricamente con el colector, el cual debido a su movimiento rotatorio, proporciona un camino de conduccin conmutado.
1.4. Colector: Denominado tambin conmutador, est constituido de lminas de material conductor (delgas), separadas entre s y del centro del eje por
43
un material aislante, para evitar cortocircuito con dichos elementos. El colector se encuentra sobre uno de los extremos del eje del rotor, de modo que gira con ste y est en contacto con las escobillas. La funcin del colector es recoger la tensin producida por el devanado inducido, transmitindola al circuito por medio de las escobillas (llamadas tambin cepillos). En la figura 11, se muestran las partes faltantes de un rotor de motor DC que no se aprecian en la figura 10.
Figura 11. Segunda parte de un rotor de motor DC
2. Estator: En la figura 12 se muestran las partes de un estator. Este, constituye la parte fija de la mquina. Su funcin es suministrar el flujo magntico que ser usado por el bobinado del rotor para realizar su movimiento giratorio. Est formado por: 2.1. Armazn: Denominado tambin yugo, tiene dos funciones primordiales; servir como soporte y proporcionar una trayectoria de retorno al flujo magntico del rotor y del imn permanente, para completar el circuito magntico.
44
Figura 12. Estator de un motor DC
2.2. Imn permanente: Compuesto de material ferromagntico altamente remanente, se encuentra fijado al armazn o carcaza del estator. Su funcin es proporcionar un campo magntico uniforme al devanado del rotor o armadura, de modo que interacte con el campo formado por el bobinado, y se origine el movimiento del rotor como resultado de la interaccin de estos campos (ver figura 13).
Figura 13. Polaridad de los imanes de un motor DC
2.3. Escobillas: Las escobillas estn fabricadas se carbn, y poseen una dureza menor que la del colector, para evitar que ste se desgaste rpidamente. Se encuentran albergadas por los porta-escobillas. Ambos, escobillas y porta-escobillas, se encuentran en una de las tapas del estator.
45
La funcin de las escobillas es transmitir la tensin y corriente de la fuente de alimentacin hacia el colector y, por consiguiente, al bobinado del rotor. La funcin del porta-escobillas es mantener a las escobillas en su posicin de contacto firme con los segmentos del colector. Esta funcin la realiza por medio de resortes, los cuales hacen una presin moderada sobre las escobillas contra el colector. Esta presin debe mantenerse en un nivel intermedio pues, de ser excesiva, la friccin desgastara tanto a las escobillas como al colector; por otro lado, de ser mnima esta presin, se producira lo que se denomina "chisporroteo", que es cuando aparecen chispas entre las superficies del colector y las escobillas, debido a que no existe un buen contacto.
Control De Motores DC 1. Puente H En el circuito de la figura 14, se muestra un puente H de transistores, nombre que surge, obviamente, de la posicin de los transistores, en una distribucin que recuerda a la letra H. Esta configuracin es una de las ms utilizadas en el control de motores de cc, cuando es necesario que se pueda invertir el sentido de giro del motor.
Figura 14. Configuracin de un puente H
46
1.1. Funcionamiento Aplicando una seal positiva en la entrada marcada AVANCE se hace conducir al transistor Q1. La corriente de Q1 circula por las bases de Q2 y Q5, haciendo que el terminal a del motor reciba un positivo y el terminal b el negativo (tierra) como se observa en la figura 15.
Figura 15. Modalidad de avance de un circuito puente H
Si en cambio se aplica seal en la entrada RETROCESO, se hace conducir al transistor Q6, que cierra su corriente por las bases, de Q4 y Q3. En este caso se aplica el positivo al terminal b del motor y el negativo (tierra) al terminal a del motor como se muestra en la figura 16.
Figura 16. Modalidad de retroceso de un circuito puente H
47
Una de las cosas muy importantes que se deben tener en cuenta en el control de este circuito es que las seales AVANCE y RETROCESO jams deben coincidir. Si esto ocurre los transistores, Q2, Q3, Q4 y Q5 cerrarn circuito directamente entre el dispositivo de la fuente de alimentacin y tierra, sin pasar por el motor, de modo que es seguro que se exceder la capacidad de corriente Emisor-Colector y los transistores, se daarn para siempre. Y si la fuente no posee proteccin, tambin podr sufrir importantes daos. Al efecto existen varias formas de asegurarse de esto, utilizando circuitos que impiden esta situacin (llamados "de interlock), genera lmente digitales, basados en compuertas lgicas. Ver figura 17.
Figura 17. Circuito interlock para un puente H
He aqu otra opcin de Puente H y circuito de interlock, con la ventaja de que utiliza menos transistores, tipo Darlington en este caso) y de tener un circuito de interlock an ms seguro. En el circuito anterior, si se presentan las dos seales activas simultneamente se habilita uno de los sentidos de marcha, sin que se pueda prever cul ser. Si las seales llegan con una leve diferencia de tiempo, se habilita la orden que ha llegado primero, pero si ambas seales llegan al mismo tiempo no se puede prever cul comando (AVANCE o RETROCESO) ser habilitado. En este segundo circuito no se habilita ninguno como se observa en la figura 18:
48
Figura 18. Circuito interlock aadido al circuito puente H
El circuito Puente H slo permite un funcionamiento S-NO del motor, a plena potencia en un sentido o en el otro (adems del estado de detencin, por supuesto), pero no ofrece un modo de controlar la velocidad. Si es necesario hacerlo, se puede apelar a la regulacin del voltaje de la fuente de alimentacin, variando su potencial de 12 V hacia abajo para reducir la velocidad. Esta variacin de tensin de fuente produce la necesaria variacin de corriente en el motor y, por consiguiente, de su velocidad de giro.
Controlador Lgico Programable (PLC)
Historia La empresa Bedford Associates (Bedford, MA) propuso un sistema al que llam Modular Digital Controller o MODICON a una empresa fabricante de autos en los Estados Unidos. El MODICON 084 fue el primer PLC producido comercialmente. Con este Sistema cuando la produccin necesitaba variarse, entonces se variaba el sistema y ya.
49
En el sistema basado en rels, estos tenan un tiempo de vida limitado y se necesitaba un sistema de mantenimiento muy estricto. El alambrado de muchos rels en un sistema muy grande era muy complicado, si haba una falla, la deteccin del error era muy tediosa y lenta. Este nuevo controlador (el PLC) tena que ser fcilmente programable, su vida til tena que ser larga y ser resistente a ambientes difciles. Esto se logr con tcnicas de programacin conocidas y reemplazando los rels por elementos de estado slido. A mediados de los aos 70, la AMD 2901 y 2903 eran muy populares entre los PLC MODICON. Por esos tiempos los microprocesadores no eran tan rpidos y slo podan compararse a PLCs pequeos. Con el avance en el desarrollo de los microprocesadores (ms veloces), cada vez PLC ms grandes se basan en ellos. La habilidad de comunicacin entre ellos apareci aproximadamente en el ao 1973. El primer sistema que lo haca fue el Modbus de Modicon. Los PLC podan incluso estar alejados de la mquinaria que controlaban, pero la falta de estandarizacin debido al constante cambio en la tecnologa hizo que esta comunicacin se tornara difcil. En los aos 80 se intent estandarizar la comunicacin entre PLCs con el protocolo de automatizacin de manufactura de la General Motors (MAP). En esos tiempos el tamao del PLC se redujo, su programacin se realizaba mediante computadoras personales (PC) en vez de terminales dedicadas slo a ese propsito. En los aos 90 se introdujeron nuevos protocolos y se mejoraron algunos anteriores. El ltimo estndar (IEC 1131-3) ha intentado combinar los lenguajes de programacin de los PLC en un solo estndar internacional.
50
Ahora se tiene PLCs que se programan en funcin de diagrama de bloques, listas de instrucciones, lenguaje C, etc. al mismo tiempo. Tambin se ha dado el caso en que computadoras personales (PC) han reemplazado a PLCs. La compaa original que diseo el primer PLC (MODICON) ahora crea sistemas de control basados en PC. Twido Dedicado a la automatizacin de instalaciones industriales simples y de mquinas pequeas, Twido se encuentra disponible en dos versiones: Compacto y Modular, que comparten opcionales, extensiones de E/S y el software de programacin, otorgndole mxima flexibilidad y simplicidad de uso. Twido reduce los espacios en los tableros gracias a su pequeo tamao.
Tanto los controladores como los mdulos de extensin de E/S, ofrecen una gran variedad en opciones para simplificar el cableado: borneras extrables, conectores a resorte y varios mdulos precableados llamados Twidofast. En la figura 19, se observa un modelo de ste tipo de controladores.
Figura 19. Controlador Lgico Programable Twido
TwidoSuite
Este software es el resultado de un estudio ergonmico, TwidoSuite ha sido desarrollado para ayudar y simplificar todas las tareas con el objetivo de reducir
51
considerablemente el tiempo de desarrollo. Est diseado para desarrollos simples o complejos que comprendan entre 10 y 100 E/S y tambin asegura la evolucin de los sistemas de automatizacin.
GRAFCET Los primeros mtodos para el desarrollo de automatismos eran puramente intuitivos, llevados a trminos por expertos y desarrollados basndose en la experiencia. En la actualidad se utilizan mtodos ms sistemticos con lo que no es necesario ser un experto en automatismos para llevarlos a trmino. El GRAFCET es un diagrama funcional que describe los procesos a automatizar, teniendo en cuenta las acciones a realizar, y los procesos intermedios que provocan estas acciones. Este mtodo de representacin es aceptado en Europa y homologado por varios pases, entre ellos Francia por la norma NFC-03-190 y en Alemania por DIN. 1. Reglas del GRAFCET Un GRAFCET est compuesto de: 1.1. Etapa: define un estado en el que se encuentra el automatismo. Las etapas de inicio se marcan con un doble cuadrado. 1.2. Accin asociada: define la accin que va a realizar la etapa, por ejemplo conectar un contactor, desconectar una bobina, etc. 1.3. Transicin: es la condicin o condiciones que, conjuntamente con la etapa anterior, hacen evolucionar el GRAFCET de una etapa a la siguiente, por ejemplo un pulsador, un detector, un temporizador, etc. En la figura 20 se observa grficamente las reglas del GRAFCET:
52
Figura 20. Reglas del GRAFCET
LABVIEW LabVIEW es un entorno de programacin grfica usado por miles de ingenieros e investigadores para desarrollar sistemas sofisticados de medida, pruebas y control usando conos grficos e intuitivos y cables que parecen un diagrama de flujo. LabVIEW ofrece una integracin incomparable con miles de dispositivos de hardware y brinda cientos de bibliotecas integradas para anlisis avanzado y visualizacin de datos. La plataforma LabVIEW es escalable a travs de mltiples objetivos y sistemas operativos, desde su introduccin en 1986 se ha vuelto un lder en la industria. LabVIEW introduce dos mdulos: LabVIEW Real-Time y LabVIEW DSC con los cuales se puede soportar el Modbus TCP nativo y el Modbus Serial en cualquier Puerto Ethernet o serial pudindose dar utilidad a estos protocolos
comnmente utilizados en el mercado. Cualquiera de estos dos mdulos permite crear un servidor de E/S Modbus TCP o Modbus Serial a travs de un asistente de configuracin grfica. El modulo de LabVIEW DSC proporciona la habilidad para que LabVIEW funcione como un cliente OPC abierto, implementando los fundamentos OPC proporcionando as una conectividad fcil con cualquier servidor a partir de la interface del servidor OPC.
Вам также может понравиться
- OfertaBecas 17 5 22Документ2 страницыOfertaBecas 17 5 22JCh DiazОценок пока нет
- Milagros Sanidad LenguasДокумент24 страницыMilagros Sanidad LenguasJCh DiazОценок пока нет
- SeguridadДокумент51 страницаSeguridadvelkyparraОценок пока нет
- Form Incompatibilidad Doble Precepcion 2014Документ1 страницаForm Incompatibilidad Doble Precepcion 2014JCh DiazОценок пока нет
- Machote de Carta de RenunciaДокумент1 страницаMachote de Carta de RenunciaJorge Ordoñez Del ValleОценок пока нет
- CATALOGO 2019 CASA MARIA SP 04.06wДокумент14 страницCATALOGO 2019 CASA MARIA SP 04.06wJCh DiazОценок пока нет
- FT Antiparra de Seguridad Steelpro K 2 AfДокумент2 страницыFT Antiparra de Seguridad Steelpro K 2 AfRenán SuárezОценок пока нет
- Vista SuperiorДокумент1 страницаVista SuperiorJCh DiazОценок пока нет
- Antiparra De: Seguridad OneДокумент1 страницаAntiparra De: Seguridad OneJCh DiazОценок пока нет
- Reglamento de modalidades de graduaciónДокумент37 страницReglamento de modalidades de graduaciónJCh DiazОценок пока нет
- Cartilla 7 Complejos Prod Pag 1-10 PDFДокумент6 страницCartilla 7 Complejos Prod Pag 1-10 PDFJCh DiazОценок пока нет
- Manual Usuario en PatentesДокумент61 страницаManual Usuario en PatentesJCh DiazОценок пока нет
- SENAPIДокумент1 страницаSENAPIJCh DiazОценок пока нет
- Tomo 1 IndiceДокумент5 страницTomo 1 IndiceJCh DiazОценок пока нет
- AmarantoДокумент1 страницаAmarantoJCh DiazОценок пока нет
- Tomo 1 CaratulaДокумент1 страницаTomo 1 CaratulaPercy RobertОценок пока нет
- Gestión de Mantenimiento Enfocado A Los CostosДокумент1 страницаGestión de Mantenimiento Enfocado A Los CostosJCh DiazОценок пока нет
- Nomina ProveedoresДокумент5 страницNomina ProveedoresJCh DiazОценок пока нет
- Empresa SS SteelДокумент1 страницаEmpresa SS SteelJCh DiazОценок пока нет
- Las Cabinas de Secado Deben Operar A Una Temperatura Concreta o Seguir Un Ciclo Determinado de CalentamientoДокумент1 страницаLas Cabinas de Secado Deben Operar A Una Temperatura Concreta o Seguir Un Ciclo Determinado de CalentamientoJCh DiazОценок пока нет
- CivilianДокумент2 страницыCivilianJCh Diaz100% (1)
- VVVVVRRДокумент6 страницVVVVVRRIvan RojasОценок пока нет
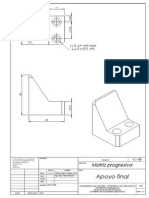
- Apoyo FinalДокумент1 страницаApoyo FinalJCh DiazОценок пока нет
- AISI Acero Conformado en FrioДокумент112 страницAISI Acero Conformado en FrioWaldemar Cepeda Murillo100% (1)
- AISI Acero Conformado en FrioДокумент112 страницAISI Acero Conformado en FrioWaldemar Cepeda Murillo100% (1)
- SecadorДокумент8 страницSecadorJCh DiazОценок пока нет
- Lanavidrio PDFДокумент4 страницыLanavidrio PDFJCh DiazОценок пока нет
- Un Transistor NPN Teoria1 DДокумент9 страницUn Transistor NPN Teoria1 DPaul Carranza ChiaraОценок пока нет
- 601 Ley de Gauss Campo Eléctrico 1 (Coulomb, Campo Eléctrico, Gauss)Документ4 страницы601 Ley de Gauss Campo Eléctrico 1 (Coulomb, Campo Eléctrico, Gauss)Isabella SciglianoОценок пока нет
- Análisis de circuito RL de primer ordenДокумент2 страницыAnálisis de circuito RL de primer ordenJOSE ESTEBAN MENDEZ MENDEZОценок пока нет
- Radiacion y Ondas GuiadasДокумент276 страницRadiacion y Ondas GuiadasJonathan Pinedo YzaguirreОценок пока нет
- Portafolio de Evidencias de LaboratorioДокумент65 страницPortafolio de Evidencias de LaboratorioSergio RamirezОценок пока нет
- Ensayos en Un TransformadorДокумент3 страницыEnsayos en Un TransformadorPatricio Ignacio Ruiz RebolledoОценок пока нет
- Instalaciones ElectricasДокумент69 страницInstalaciones ElectricasBryan MestanzaОценок пока нет
- Guia Didactica PCPI Instalaciones Electricas de Baja TensionДокумент22 страницыGuia Didactica PCPI Instalaciones Electricas de Baja TensionagmorillaОценок пока нет
- Sep 3-1Документ6 страницSep 3-1Joan Joel Cáceres RamirezОценок пока нет
- Ucontrol Revista 0003Документ68 страницUcontrol Revista 0003Harold Hernan Muñoz0% (1)
- Medidor ESR Sencillo Con 555Документ4 страницыMedidor ESR Sencillo Con 555jotas2525Оценок пока нет
- Sensores Bruce PullaДокумент2 страницыSensores Bruce PullaBruce PullaОценок пока нет
- Laboratorio F #3 Ley de OhmДокумент8 страницLaboratorio F #3 Ley de OhmMaría José Jiménez SerranoОценок пока нет
- Medidor de campos electromagnéticos EMF-827: características, especificaciones y usoДокумент7 страницMedidor de campos electromagnéticos EMF-827: características, especificaciones y usomoriel115Оценок пока нет
- Caracterización de Pérdidas en El Núcleo de Transformadores de Distribución en El Dominio de La FrecuenciaДокумент72 страницыCaracterización de Pérdidas en El Núcleo de Transformadores de Distribución en El Dominio de La FrecuenciaRafaelEnriqueОценок пока нет
- 7 Inductancia1Документ8 страниц7 Inductancia1Fany XoriaОценок пока нет
- Inspección por Partículas MagnéticasДокумент7 страницInspección por Partículas MagnéticasJuelCideОценок пока нет
- Cuestionario de Reacciones Químicas, Ácido-Base y REDOXДокумент3 страницыCuestionario de Reacciones Químicas, Ácido-Base y REDOXJoaquin Duvan Ortiz CasasОценок пока нет
- INFORME MaquinasДокумент10 страницINFORME MaquinasEdisohn Montalvo BarriosОценок пока нет
- MobilHybrid EN 2022.en - EsДокумент20 страницMobilHybrid EN 2022.en - Esedward dennis salvador quintoОценок пока нет
- Lifud Tarifa PVP Mayo 2019Документ36 страницLifud Tarifa PVP Mayo 2019VEMATELОценок пока нет
- Sensor Ots Temperatura AceiteДокумент3 страницыSensor Ots Temperatura Aceitewilser romaОценок пока нет
- Tarea 2Документ2 страницыTarea 2Pexe MontesОценок пока нет
- 3.propiedades de La Fibra OpticaДокумент19 страниц3.propiedades de La Fibra OpticaALBERTO MARIO CAICEDO ROYEROОценок пока нет
- Campo magnético: Líneas de campo y efecto de la corrienteДокумент20 страницCampo magnético: Líneas de campo y efecto de la corrienteHarly MaradiagaОценок пока нет
- Supervision Informe Nro 04 - Valorizacion 02-MarzoДокумент31 страницаSupervision Informe Nro 04 - Valorizacion 02-MarzoSolange CarpioОценок пока нет
- Taller Nicaragüense de Transformadores de Distribución y Potencia SДокумент14 страницTaller Nicaragüense de Transformadores de Distribución y Potencia SLeonaro MontenegroОценок пока нет
- Centrales Hidroeléctricas Del PerúДокумент16 страницCentrales Hidroeléctricas Del PerúRenzo Sumer Acosta JaraОценок пока нет
- Specsheet Pararrayos PDFДокумент2 страницыSpecsheet Pararrayos PDFingguedezandresОценок пока нет
- Circuito de disparo por DIACДокумент4 страницыCircuito de disparo por DIACMauricio GuevaraОценок пока нет