Вам также может понравиться
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- Numerical Methods DynamicsДокумент16 страницNumerical Methods DynamicsZaeem KhanОценок пока нет
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)От EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Оценок пока нет
- Chap2 603Документ29 страницChap2 603naefmubarak100% (1)
- Initial Value Problems: 5.1 Finite Difference MethodsДокумент11 страницInitial Value Problems: 5.1 Finite Difference MethodsEfstathios SiampisОценок пока нет
- Initial Value Problems: 5.1 Finite Difference MethodsДокумент11 страницInitial Value Problems: 5.1 Finite Difference MethodsMohammed AsherОценок пока нет
- Stability of The Leapfrogmidpoint MethodДокумент10 страницStability of The Leapfrogmidpoint MethodpavannotinОценок пока нет
- Basic Dyn Con Textbook FreeДокумент28 страницBasic Dyn Con Textbook FreeKaram AlmasriОценок пока нет
- Averaging Oscillations With Small Fractional Damping and Delayed TermsДокумент20 страницAveraging Oscillations With Small Fractional Damping and Delayed TermsYogesh DanekarОценок пока нет
- An Introduction To The Split Step Fourier Method Using MATLABДокумент15 страницAn Introduction To The Split Step Fourier Method Using MATLABHafiz Faiz RasoolОценок пока нет
- An Introduction To The Split Step Fourier Method Using MATLABДокумент15 страницAn Introduction To The Split Step Fourier Method Using MATLABLeonard Nsah100% (1)
- Lecture 8Документ12 страницLecture 8Mohamad AbbasОценок пока нет
- Fluid Equations' SolverДокумент8 страницFluid Equations' Solvertwinkie3Оценок пока нет
- Lecture5 (Amplifier Noise Etc)Документ5 страницLecture5 (Amplifier Noise Etc)Jaime BerryОценок пока нет
- Introduction To The Keldysh Formalism: Alex KamenevДокумент34 страницыIntroduction To The Keldysh Formalism: Alex Kamenev전희준Оценок пока нет
- Partial Differential Equations (Pdes)Документ5 страницPartial Differential Equations (Pdes)uploadingpersonОценок пока нет
- ClassnotesДокумент118 страницClassnotesfranklloyd1975Оценок пока нет
- The Conservation LawsДокумент5 страницThe Conservation LawsMark AjОценок пока нет
- A Mach-Uniform Algorithm: Coupled Versus Segregated ApproachДокумент7 страницA Mach-Uniform Algorithm: Coupled Versus Segregated ApproachErnesto Delfino AguirreОценок пока нет
- Articulo Periodic Oscillations of The Relativistic Pendulum With FrictionДокумент2 страницыArticulo Periodic Oscillations of The Relativistic Pendulum With FrictionHumberto ValadezОценок пока нет
- 16 Fortin1989 PDFДокумент16 страниц16 Fortin1989 PDFHassan ZmourОценок пока нет
- 1 Week 02: 2 and 4 September 2008Документ11 страниц1 Week 02: 2 and 4 September 2008Roney WuОценок пока нет
- Oldroyd B FluidДокумент8 страницOldroyd B FluidAslıhan örümОценок пока нет
- FORTRAN 77 Lesson 7: 1 Numerical IntegrationДокумент7 страницFORTRAN 77 Lesson 7: 1 Numerical IntegrationManjita BudhirajaОценок пока нет
- Chapter 3Документ22 страницыChapter 3lol30315orzОценок пока нет
- Methods For Ordinary Differential Equations: 5.1 Initial-Value ProblemsДокумент20 страницMethods For Ordinary Differential Equations: 5.1 Initial-Value ProblemsPatricia Calvo PérezОценок пока нет
- Very Short Intro GodunovДокумент17 страницVery Short Intro GodunovmafrisbeОценок пока нет
- Blow Up Profile For The Ginzburg Landau EquationДокумент54 страницыBlow Up Profile For The Ginzburg Landau Equationidownloadbooks3133Оценок пока нет
- 3.3. Phase and Amplitude Errors of 1-D Advection EquationДокумент52 страницы3.3. Phase and Amplitude Errors of 1-D Advection EquationSamKtkОценок пока нет
- Journal of Physics A Mathematical and General 2002 Vol. 35 (14) p3245Документ20 страницJournal of Physics A Mathematical and General 2002 Vol. 35 (14) p3245Héctor F BonillaОценок пока нет
- Direct Numerical Integration MethodsДокумент19 страницDirect Numerical Integration MethodsallentvmОценок пока нет
- Statistical Mechanics Lecture Notes (2006), L7Документ8 страницStatistical Mechanics Lecture Notes (2006), L7OmegaUserОценок пока нет
- Split Operator MethodДокумент13 страницSplit Operator MethodLucian S. VélezОценок пока нет
- Numcl Notes HOMEPAGEДокумент103 страницыNumcl Notes HOMEPAGEJ-in KimОценок пока нет
- Numerical Solution of Hamilton-Jacobi-Bellman Equations by An Upwind Finite Volume MethodДокумент16 страницNumerical Solution of Hamilton-Jacobi-Bellman Equations by An Upwind Finite Volume MethodSteve DemirelОценок пока нет
- Methods For Ordinary Differential Equations: 5.1 Initial-Value ProblemsДокумент20 страницMethods For Ordinary Differential Equations: 5.1 Initial-Value Problemsupasana9Оценок пока нет
- Travelling Wave Solutions of Some Classes of Non 2002 Journal of ComputationДокумент9 страницTravelling Wave Solutions of Some Classes of Non 2002 Journal of ComputationTuyệt Thư MậtОценок пока нет
- Simulation of Stopped DiffusionsДокумент22 страницыSimulation of Stopped DiffusionssupermanvixОценок пока нет
- Nuclear PhysicsДокумент11 страницNuclear Physicsgiovanny_francisОценок пока нет
- An Introduction To Twophaseeulerfoam With Addition of An Heat Exchange Model in 23X VersionДокумент29 страницAn Introduction To Twophaseeulerfoam With Addition of An Heat Exchange Model in 23X VersionVladJОценок пока нет
- Numerical Solution To Differential EquationДокумент46 страницNumerical Solution To Differential EquationAnjishnu AdhikariОценок пока нет
- Ch5 The Advection Diffusion EquationДокумент19 страницCh5 The Advection Diffusion EquationCatalina Arya Yáñez ArancibiaОценок пока нет
- Discrete Maximal Regularity of Time-Stepping SchemДокумент32 страницыDiscrete Maximal Regularity of Time-Stepping Schemأم الخير تافنيОценок пока нет
- Implementation of The Behavior of A Particle in A Double-Well Potential Using The Fourth-Order Runge-Kutta MethodДокумент3 страницыImplementation of The Behavior of A Particle in A Double-Well Potential Using The Fourth-Order Runge-Kutta MethodCindy Liza EsporlasОценок пока нет
- Analisa NumerikДокумент62 страницыAnalisa Numerikmohammad affanОценок пока нет
- Visan - Nonlinear SCHR Odinger Equations at Critical Regularity - Clay Lecture Notes - 2013Документ113 страницVisan - Nonlinear SCHR Odinger Equations at Critical Regularity - Clay Lecture Notes - 2013danni7Оценок пока нет
- Implicit MethodДокумент30 страницImplicit MethodshekhadaaОценок пока нет
- Transformation From Cartesian To Geodetic Coordinates Accelerated by Halley S MethodoДокумент5 страницTransformation From Cartesian To Geodetic Coordinates Accelerated by Halley S MethodoDaniela MendesОценок пока нет
- Chap 7Документ24 страницыChap 7AmmarNikОценок пока нет
- Finite Difference Solution of The Heat Equation: Adam PowellДокумент6 страницFinite Difference Solution of The Heat Equation: Adam PowellnitsilcharassamОценок пока нет
- Introduction To The Keldysh Formalism: Alex KamenevДокумент34 страницыIntroduction To The Keldysh Formalism: Alex KamenevvanalexbluesОценок пока нет
- Lecture5 (Amplifier Noise Etc)Документ5 страницLecture5 (Amplifier Noise Etc)bitconcepts9781Оценок пока нет
- The Runge-Kutta MethodДокумент9 страницThe Runge-Kutta MethodSlavka JadlovskaОценок пока нет
- Ns EquationsДокумент9 страницNs EquationsTahok24Оценок пока нет
- A Genuinely High Order Total Variation Diminishing Scheme For One-Dimensional Scalar Conservation LawsДокумент24 страницыA Genuinely High Order Total Variation Diminishing Scheme For One-Dimensional Scalar Conservation LawsPasquale CutriОценок пока нет
- ρA ´u x, t ∂ p x,t ∂ x b x, tДокумент8 страницρA ´u x, t ∂ p x,t ∂ x b x, tAlicia HambureОценок пока нет
- Multiplicity of Periodic Solutions for Dynamic Li´ enard Equations with Delay and Singular ϕ-laplacian of Relativistic TypeДокумент14 страницMultiplicity of Periodic Solutions for Dynamic Li´ enard Equations with Delay and Singular ϕ-laplacian of Relativistic TypeGustavo BalОценок пока нет
- Chapter 1 - IntroductionДокумент36 страницChapter 1 - IntroductionHìnhxămNơigóckhuấtTimAnh0% (1)
- Crank Nick OlsonДокумент7 страницCrank Nick OlsonAyak CholОценок пока нет
- Lam MasterTechWiskДокумент55 страницLam MasterTechWiskVinay GuptaОценок пока нет
- Seepage and Thermal Effects in Porous MediaДокумент6 страницSeepage and Thermal Effects in Porous MediaVinay GuptaОценок пока нет
- Fraction Animal ClassДокумент3 страницыFraction Animal ClassVinay GuptaОценок пока нет
- A Mass-Conserving Level-Set Method For Modelling of Multi-Phase OwsДокумент23 страницыA Mass-Conserving Level-Set Method For Modelling of Multi-Phase OwsVinay GuptaОценок пока нет
- 13 - Fluids at Rest and Piped FluidsДокумент7 страниц13 - Fluids at Rest and Piped FluidsVinay GuptaОценок пока нет
- Water in The Atmosphere: ATS 351 - Lecture 5Документ33 страницыWater in The Atmosphere: ATS 351 - Lecture 5Vinay Gupta100% (1)
- ITK-233-2 - PVT Behavior of FluidДокумент57 страницITK-233-2 - PVT Behavior of FluidVinay GuptaОценок пока нет
- Test-Case Number 13: Shock Tubes (PA)Документ10 страницTest-Case Number 13: Shock Tubes (PA)Vinay GuptaОценок пока нет
- 6.4 Geothermal Convection in Porous MediaДокумент2 страницы6.4 Geothermal Convection in Porous MediaVinay GuptaОценок пока нет
- Aw of OiseuilleДокумент4 страницыAw of OiseuilleVinay GuptaОценок пока нет
- Morgan Nathaniel R 200505 PHDДокумент104 страницыMorgan Nathaniel R 200505 PHDVinay GuptaОценок пока нет
- Input and Output 2. Modules: Sample Programs - Week 4 AUTUMN 2004Документ5 страницInput and Output 2. Modules: Sample Programs - Week 4 AUTUMN 2004Vinay GuptaОценок пока нет
- A Fully Conservative Ghost Fluid Method & Stiff Detonation WavesДокумент10 страницA Fully Conservative Ghost Fluid Method & Stiff Detonation WavesVinay GuptaОценок пока нет
- C 1Документ6 страницC 1Vinay GuptaОценок пока нет
- Pressure Outlet Ghost Fluid TreatmentДокумент18 страницPressure Outlet Ghost Fluid TreatmentVinay GuptaОценок пока нет
- Turbulence AUTUMN 2004Документ20 страницTurbulence AUTUMN 2004Vinay GuptaОценок пока нет
- CDR Writing: Components of The CDRДокумент5 страницCDR Writing: Components of The CDRindikuma100% (3)
- Flying ColorsДокумент100 страницFlying ColorsAgnieszkaAgayo20% (5)
- Ac221 and Ac211 CourseoutlineДокумент10 страницAc221 and Ac211 CourseoutlineLouis Maps MapangaОценок пока нет
- Catálogo MK 2011/2013Документ243 страницыCatálogo MK 2011/2013Grupo PriluxОценок пока нет
- Centrifuge ThickeningДокумент8 страницCentrifuge ThickeningenviroashОценок пока нет
- Geotechnical Aspects of Open Stope Design at BHP Cannington: G C StreetonДокумент7 страницGeotechnical Aspects of Open Stope Design at BHP Cannington: G C StreetonJuan PerezОценок пока нет
- Freshers Jobs 26 Aug 2022Документ15 страницFreshers Jobs 26 Aug 2022Manoj DhageОценок пока нет
- PDF of Tally ShortcutsДокумент6 страницPDF of Tally ShortcutsSuraj Mehta100% (2)
- Pt. Trijaya Agro FoodsДокумент18 страницPt. Trijaya Agro FoodsJie MaОценок пока нет
- Ac1025 Exc16 (1) .PDFTTTTTTTTTTTTTTTTTTTДокумент50 страницAc1025 Exc16 (1) .PDFTTTTTTTTTTTTTTTTTTTHung Faat ChengОценок пока нет
- BioremediationДокумент21 страницаBioremediationagung24864Оценок пока нет
- Toxemias of PregnancyДокумент3 страницыToxemias of PregnancyJennelyn LumbreОценок пока нет
- Morse Potential CurveДокумент9 страницMorse Potential Curvejagabandhu_patraОценок пока нет
- 1 - Laminar and Turbulent Flow - MITWPU - HP - CDK PDFДокумент13 страниц1 - Laminar and Turbulent Flow - MITWPU - HP - CDK PDFAbhishek ChauhanОценок пока нет
- Asan Visa Ae102901499Документ2 страницыAsan Visa Ae102901499hardeep ranaОценок пока нет
- Bigbazaar PDFДокумент14 страницBigbazaar PDFazhagu sundaramОценок пока нет
- Introduction To M365 PresentationДокумент50 страницIntroduction To M365 Presentationlasidoh0% (1)
- Pricing of A Revolutionary ProductДокумент22 страницыPricing of A Revolutionary ProductiluvparixitОценок пока нет
- HAYAT - CLINIC BrandbookДокумент32 страницыHAYAT - CLINIC BrandbookBlankPointОценок пока нет
- Onset Hobo Trade T Cdi 5200 5400 User ManualДокумент3 страницыOnset Hobo Trade T Cdi 5200 5400 User Manualpaull20020% (1)
- Properties of LiquidsДокумент26 страницProperties of LiquidsRhodora Carias LabaneroОценок пока нет
- Docsity Detailed Lesson Plan 5Документ4 страницыDocsity Detailed Lesson Plan 5Sydie MoredoОценок пока нет
- How To Present A Paper at An Academic Conference: Steve WallaceДокумент122 страницыHow To Present A Paper at An Academic Conference: Steve WallaceJessicaAF2009gmtОценок пока нет
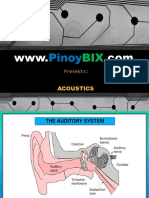
- AcousticsДокумент122 страницыAcousticsEclipse YuОценок пока нет
- Research On Export Trade in BangladeshДокумент7 страницResearch On Export Trade in BangladeshFarjana AnwarОценок пока нет
- T-Tess Six Educator StandardsДокумент1 страницаT-Tess Six Educator Standardsapi-351054075100% (1)
- Journal of Atmospheric Science Research - Vol.5, Iss.4 October 2022Документ54 страницыJournal of Atmospheric Science Research - Vol.5, Iss.4 October 2022Bilingual PublishingОценок пока нет
- Manual: Functional SafetyДокумент24 страницыManual: Functional SafetymhaioocОценок пока нет
- How Can Literary Spaces Support Neurodivergent Readers and WritersДокумент2 страницыHow Can Literary Spaces Support Neurodivergent Readers and WritersRenato Jr Bernadas Nasilo-anОценок пока нет
- 200150, 200155 & 200157 Accelerometers: DescriptionДокумент16 страниц200150, 200155 & 200157 Accelerometers: DescriptionJOSE MARIA DANIEL CANALESОценок пока нет
- Mental Math Secrets - How To Be a Human CalculatorОт EverandMental Math Secrets - How To Be a Human CalculatorРейтинг: 5 из 5 звезд5/5 (3)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormОт EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormРейтинг: 5 из 5 звезд5/5 (5)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeОт EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeРейтинг: 4 из 5 звезд4/5 (2)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.От EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Рейтинг: 5 из 5 звезд5/5 (1)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsОт EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldОт EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldРейтинг: 3 из 5 звезд3/5 (80)
- Calculus Workbook For Dummies with Online PracticeОт EverandCalculus Workbook For Dummies with Online PracticeРейтинг: 3.5 из 5 звезд3.5/5 (8)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingОт EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingРейтинг: 4.5 из 5 звезд4.5/5 (21)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)От EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Оценок пока нет
- Images of Mathematics Viewed Through Number, Algebra, and GeometryОт EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryОценок пока нет
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)От EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Оценок пока нет
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeОт EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticeРейтинг: 5 из 5 звезд5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsОт EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsРейтинг: 3.5 из 5 звезд3.5/5 (9)
- A-level Maths Revision: Cheeky Revision ShortcutsОт EverandA-level Maths Revision: Cheeky Revision ShortcutsРейтинг: 3.5 из 5 звезд3.5/5 (8)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathОт EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathРейтинг: 5 из 5 звезд5/5 (1)