Вам также может понравиться
- Materiales Adicionales Formato TR7 Sertech 06 07Документ6 страницMateriales Adicionales Formato TR7 Sertech 06 07CARLOS CRUZОценок пока нет
- Porticos y BarrasДокумент13 страницPorticos y BarrasJH NeinОценок пока нет
- Practica No 1 y 2Документ5 страницPractica No 1 y 2Ian CaballeroОценок пока нет
- Moneda SДокумент4 страницыMoneda SPaola COBEÑAОценок пока нет
- Parametros Del Variador de Media Tension PDFДокумент144 страницыParametros Del Variador de Media Tension PDFSantiagoAlejandroZúñigaTrellesОценок пока нет
- Sistema Delta EstrellaДокумент6 страницSistema Delta EstrellaAnonymous HxB3uuLt8Оценок пока нет
- Tarea 1 ING MAT APДокумент3 страницыTarea 1 ING MAT APVictor MejiaОценок пока нет
- Manual Upsind 1300mr 10a100Документ76 страницManual Upsind 1300mr 10a100Domingo RuizОценок пока нет
- PTACB - PTCCB - Interruptores de Protección en Baja Tensión V.2 200417Документ60 страницPTACB - PTCCB - Interruptores de Protección en Baja Tensión V.2 200417tatoОценок пока нет
- Ley de Voltaje de KirchhooffДокумент7 страницLey de Voltaje de KirchhooffMichael Lòpez56% (9)
- Instalaciones para Suministro de AguaДокумент69 страницInstalaciones para Suministro de AguaOmar PachecoОценок пока нет
- Segundo ApunteДокумент41 страницаSegundo ApunteJuan Carlos YurquinaОценок пока нет
- Conductores PDFДокумент5 страницConductores PDFL̳u̳i̳S̳s̳ C̳h̳Оценок пока нет
- Presaberes - Jeferson Castañeda - 11Документ8 страницPresaberes - Jeferson Castañeda - 11Jeferson CastañedaОценок пока нет
- PROBLEMAS RESUELTOS DE MAQUINAS ELECTRICAS ROTATIVAS - Universidad de Jaume I PDFДокумент345 страницPROBLEMAS RESUELTOS DE MAQUINAS ELECTRICAS ROTATIVAS - Universidad de Jaume I PDFcopino18Оценок пока нет
- Electrovalvulas SY100 - ESДокумент18 страницElectrovalvulas SY100 - ESKaren DonosoОценок пока нет
- Sistemas ElectroquímicosДокумент72 страницыSistemas ElectroquímicosMónica Fernández VelázquezОценок пока нет
- 18 Vol II LT IXP - JUI - UnlockedДокумент34 страницы18 Vol II LT IXP - JUI - UnlockedNoé Rafael Colorado SósolОценок пока нет
- UntitledДокумент58 страницUntitledRolando Raul Jimenez AjilaОценок пока нет
- Actividad de Aprendizaje 4-1Документ7 страницActividad de Aprendizaje 4-1ANDRES ALESSANDRO BALSECA AGUIRREОценок пока нет
- EP2 BiofísicaДокумент7 страницEP2 BiofísicaCarmem AlbuquerqueОценок пока нет
- Cuestionario AnalíticaДокумент9 страницCuestionario AnalíticaEstâlïn Jïménëz JEОценок пока нет
- Clavija Macho en Una CanaletaДокумент4 страницыClavija Macho en Una Canaletaginapao911694Оценок пока нет
- Sistemas de Inyección Gasolina-Tecsup PDFДокумент253 страницыSistemas de Inyección Gasolina-Tecsup PDFDamian100% (1)
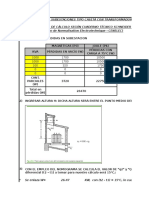
- Calculo de Ventilacion en Se Caseta (Aceite)Документ21 страницаCalculo de Ventilacion en Se Caseta (Aceite)williamОценок пока нет
- 2.el Manso CochamoДокумент1 страница2.el Manso CochamoMauricio ReyesОценок пока нет
- Practica 1 FisicaДокумент15 страницPractica 1 Fisicalalofreud100% (1)
- DESARROLLO GUIAS No 3 Curso Instalaciones Electricas PDF Ok RevДокумент5 страницDESARROLLO GUIAS No 3 Curso Instalaciones Electricas PDF Ok RevHarbey Hernandez SuarezОценок пока нет
- Unidad de Medida de La Carga EléctricaДокумент7 страницUnidad de Medida de La Carga EléctricaIvonne Rodriguez100% (1)
- Reporte5 Seccion 1503 Grupo#3Документ16 страницReporte5 Seccion 1503 Grupo#3Fernando GarcíaОценок пока нет