Вам также может понравиться
- Concept of Sinusoidal Distributed Windings: Appendix AДокумент9 страницConcept of Sinusoidal Distributed Windings: Appendix ASarvasaisrinathОценок пока нет
- You May Not Start To Read The Questions Printed On The Subsequent Pages of This Question Paper Until Instructed That You May Do So by The InvigilatorДокумент5 страницYou May Not Start To Read The Questions Printed On The Subsequent Pages of This Question Paper Until Instructed That You May Do So by The InvigilatorSpringOrchidОценок пока нет
- Anl RotatingMMFДокумент13 страницAnl RotatingMMFAnonymous C9ZNFkrb6Оценок пока нет
- Lecture 3 Magnetic CircuitsДокумент10 страницLecture 3 Magnetic CircuitsJojo KawayОценок пока нет
- Calculation of PCB Track ImpedanceДокумент6 страницCalculation of PCB Track ImpedanceDurbha RaviОценок пока нет
- And TM-Waves in Waveguides General Cross Section": NovemberДокумент9 страницAnd TM-Waves in Waveguides General Cross Section": Novemberవేలుసామి లింగాసామిОценок пока нет
- SLT GДокумент4 страницыSLT GrhythmОценок пока нет
- Dynamic Interaction of Surface Machine Foundations Under Vertical Harmonic ExcitationДокумент18 страницDynamic Interaction of Surface Machine Foundations Under Vertical Harmonic ExcitationSayed ElarabyОценок пока нет
- Fundamentals of Space-Vector TheoryДокумент16 страницFundamentals of Space-Vector Theoryni60Оценок пока нет
- Analysis of An Aperture Coupled Micro StripДокумент8 страницAnalysis of An Aperture Coupled Micro StripYamtarОценок пока нет
- Race Car AerodynamicsДокумент20 страницRace Car AerodynamicsKrishna TejaОценок пока нет
- Lecture Notes On Streamlines and Electric Flux DensityДокумент5 страницLecture Notes On Streamlines and Electric Flux DensitySweetlineSoniaОценок пока нет
- Elements of Gasdynamics Liepman PDFДокумент232 страницыElements of Gasdynamics Liepman PDFprasannabalaji100% (1)
- Analysis of StructuresДокумент24 страницыAnalysis of Structuresa_j_sanyal259Оценок пока нет
- Hollow Waveguide TapersДокумент6 страницHollow Waveguide Tapersgeodinger9316Оценок пока нет
- The Complete Spectrum of The Area From Recoupling Theory in Loop Quantum GravityДокумент12 страницThe Complete Spectrum of The Area From Recoupling Theory in Loop Quantum GravityPatrick WongОценок пока нет
- Fundamentals of Space-Vector TheoryДокумент16 страницFundamentals of Space-Vector Theoryhn317Оценок пока нет
- Feedback Arc SetДокумент8 страницFeedback Arc SetLaksОценок пока нет
- HW Questions MidtermДокумент5 страницHW Questions MidtermOnur YalçınkayaОценок пока нет
- Ls Dyna BeamsДокумент18 страницLs Dyna BeamsAleem Ullah CheemaОценок пока нет
- ConverДокумент11 страницConverAnonymous tJgIbVzpОценок пока нет
- On The Curvature and Torsion of An Isolated Vortex Filament: by Robert BetchovДокумент9 страницOn The Curvature and Torsion of An Isolated Vortex Filament: by Robert Betchovsamik4uОценок пока нет
- 10 Electric CurrentДокумент12 страниц10 Electric Currentömer aydınОценок пока нет
- Magnetic Monopoles As Agents of Chiral Symmetry Breaking in U (1) Lattice Gauge TheoryДокумент14 страницMagnetic Monopoles As Agents of Chiral Symmetry Breaking in U (1) Lattice Gauge TheoryTom_BielefeldОценок пока нет
- Machine Transformations: J. MccalleyДокумент24 страницыMachine Transformations: J. MccalleykfaliОценок пока нет
- Modelling A Linear and Limited Travel SolenoidДокумент6 страницModelling A Linear and Limited Travel SolenoidsayproОценок пока нет
- 2 PHДокумент8 страниц2 PHalamryzhra62Оценок пока нет
- Livro - Modern Compressible Flow (2) 81-160Документ80 страницLivro - Modern Compressible Flow (2) 81-160Antônio Jorge SesanaОценок пока нет
- Tutorial Sheet-I Fermat's Principle and Electromagnetic WavesДокумент1 страницаTutorial Sheet-I Fermat's Principle and Electromagnetic Wavespriyanka choudharyОценок пока нет
- Streamlines and Electric Flux DensityДокумент5 страницStreamlines and Electric Flux DensitySWEETLINE SONIA.M MEC-AP/ECEОценок пока нет
- Analysis of Structures Subjected To Random Loading Using The Transfer Matrix or Numerical Integration Methods 1992Документ4 страницыAnalysis of Structures Subjected To Random Loading Using The Transfer Matrix or Numerical Integration Methods 1992ciscoОценок пока нет
- P. Mein Et Al - Magnetic Flux Tubes Observed With THEMIS/MSDPДокумент6 страницP. Mein Et Al - Magnetic Flux Tubes Observed With THEMIS/MSDPOlmnopОценок пока нет
- Drives Vector ContrДокумент16 страницDrives Vector ContrmakroumОценок пока нет
- Chap06 PDFДокумент19 страницChap06 PDFalokinxxОценок пока нет
- AD-1key MLRITДокумент22 страницыAD-1key MLRITSaiAerrogantОценок пока нет
- Xiicleee RBP 1754revДокумент6 страницXiicleee RBP 1754revrbargallo0Оценок пока нет
- Alternating Current Circuits: Chapter ThreeДокумент18 страницAlternating Current Circuits: Chapter ThreeTifano SebastianОценок пока нет
- Tapered Slot Antenna DesignДокумент10 страницTapered Slot Antenna DesignPavan NanduriОценок пока нет
- FieldsДокумент10 страницFieldsMahmoud EldabahОценок пока нет
- Thin Airfoil TheoryДокумент10 страницThin Airfoil TheoryAli Al-hamalyОценок пока нет
- (Iq) Li: P H Y - S I C A Polonica 1987 Voi. XXXV, No. 3Документ15 страниц(Iq) Li: P H Y - S I C A Polonica 1987 Voi. XXXV, No. 3SudharsananPRSОценок пока нет
- Physics QB 1Документ16 страницPhysics QB 1Vedant GaikwadОценок пока нет
- Tutorial Potential FlowДокумент3 страницыTutorial Potential FlowAfrina daniaОценок пока нет
- Unit 1 Current GenerationДокумент39 страницUnit 1 Current GenerationMuse PrintingОценок пока нет
- Circuitos MagneticosДокумент15 страницCircuitos MagneticosSantiago Medina TorresОценок пока нет
- Magnetic CircuitsДокумент61 страницаMagnetic CircuitsFaqrie AziziОценок пока нет
- Timoshenko CoefficientДокумент6 страницTimoshenko CoefficientwarterflyОценок пока нет
- A Fast Wheel-Rail Forces Calculation Computer CodeДокумент13 страницA Fast Wheel-Rail Forces Calculation Computer CodeMattia IaconoОценок пока нет
- Electromagnetic PDFДокумент13 страницElectromagnetic PDFHamid FarhanОценок пока нет
- 1960-Force and Moment Coefficients For Vibrating Aerofoils in CascadeДокумент40 страниц1960-Force and Moment Coefficients For Vibrating Aerofoils in Cascadesh1999Оценок пока нет
- Electron Beam-Specimen Interactions and Simulation Methods in MicroscopyОт EverandElectron Beam-Specimen Interactions and Simulation Methods in MicroscopyОценок пока нет
- Hyperbolic Functions: with Configuration Theorems and Equivalent and Equidecomposable FiguresОт EverandHyperbolic Functions: with Configuration Theorems and Equivalent and Equidecomposable FiguresОценок пока нет
- Intensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleОт EverandIntensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleОценок пока нет
- Electricity and Magnetism: Problems in Undergraduate PhysicsОт EverandElectricity and Magnetism: Problems in Undergraduate PhysicsРейтинг: 5 из 5 звезд5/5 (1)
- Forms D e 1FAIpQLSf-MAdoaSGPQfaXo9I5wDhДокумент4 страницыForms D e 1FAIpQLSf-MAdoaSGPQfaXo9I5wDhSoumya Ranjan SethyОценок пока нет
- DDCE Prospectus 2015-16Документ87 страницDDCE Prospectus 2015-16Soumya Ranjan Sethy100% (1)
- Sequence For Charging Grid Failed 30.07.2012Документ1 страницаSequence For Charging Grid Failed 30.07.2012Soumya Ranjan SethyОценок пока нет
- Paper 01Документ91 страницаPaper 01Soumya Ranjan SethyОценок пока нет
- ENGLISH Assignment Test 1st Sem 2016Документ2 страницыENGLISH Assignment Test 1st Sem 2016Soumya Ranjan SethyОценок пока нет
- Advertisement HZR 2019Документ9 страницAdvertisement HZR 2019InduОценок пока нет
- Reactive Introduction Oct01Документ3 страницыReactive Introduction Oct01leminhtoan12345Оценок пока нет
- Utility TurbinesДокумент67 страницUtility TurbinesBapu612345Оценок пока нет
- OPENMAT2 K 5Документ39 страницOPENMAT2 K 5DskОценок пока нет
- Presentations 8RANKINECYLEДокумент15 страницPresentations 8RANKINECYLESoumya Ranjan SethyОценок пока нет
- GenauxДокумент135 страницGenauxSoumya Ranjan SethyОценок пока нет
- Report On Pressure Control OperationДокумент3 страницыReport On Pressure Control OperationSoumya Ranjan SethyОценок пока нет
- Circle of FifthsДокумент1 страницаCircle of FifthsSoumya Ranjan SethyОценок пока нет
- Simple Electro-Magnetic Circuits: M M M L A M M MДокумент15 страницSimple Electro-Magnetic Circuits: M M M L A M M MARJUNОценок пока нет
- Open MatДокумент30 страницOpen MatEbemcha MaisnamОценок пока нет
- CBI2Документ8 страницCBI2Soumya Ranjan SethyОценок пока нет
- Utility TurbinesДокумент67 страницUtility TurbinesBapu612345Оценок пока нет
- Yeh Dil HДокумент2 страницыYeh Dil HSoumya Ranjan SethyОценок пока нет
- Animated Soot BlowerДокумент2 страницыAnimated Soot BlowerSoumya Ranjan Sethy0% (2)
- How To Make Micro-SIM From Usual SIM CardДокумент1 страницаHow To Make Micro-SIM From Usual SIM CardSoumya Ranjan SethyОценок пока нет
- Section 1 - Fossil FuelsДокумент12 страницSection 1 - Fossil FuelsSoumya Ranjan SethyОценок пока нет
- Environmental EffectsДокумент1 страницаEnvironmental EffectsSoumya Ranjan SethyОценок пока нет
- Yeh Dil HДокумент2 страницыYeh Dil HSoumya Ranjan SethyОценок пока нет
- AДокумент1 страницаASoumya Ranjan SethyОценок пока нет
- Fcaw Cost ControlДокумент13 страницFcaw Cost ControlAsad Bin Ala QatariОценок пока нет
- Ecoair Brochure PDFДокумент12 страницEcoair Brochure PDFPunks Pacerot EcoОценок пока нет
- 1b: The Seebeck Thermo-Electric EffectДокумент5 страниц1b: The Seebeck Thermo-Electric EffectSalina ShaffieОценок пока нет
- The Future of The Automobile Industry in India - McKinseyДокумент13 страницThe Future of The Automobile Industry in India - McKinseyDhiraj KhotОценок пока нет
- Cameroon: CrowfundingДокумент36 страницCameroon: Crowfundingabass nchareОценок пока нет
- Pdra 23082022Документ2 страницыPdra 23082022Ajmal SeemabОценок пока нет
- Primo SD Data SheetДокумент1 страницаPrimo SD Data SheetEric Vergel de DiosОценок пока нет
- AFC StacksДокумент9 страницAFC StacksPooveanthan HbОценок пока нет
- 2014 Yara Fertilizer Industry HandbookДокумент46 страниц2014 Yara Fertilizer Industry HandbookMarcusWerteck100% (1)
- 30-12-18 - Sr. ICON ALL - Jee-Main - GTM-7 - QP - Code-B PDFДокумент28 страниц30-12-18 - Sr. ICON ALL - Jee-Main - GTM-7 - QP - Code-B PDFM jhansiОценок пока нет
- Fuel SpecДокумент16 страницFuel SpechtutsweОценок пока нет
- Physics Honours Regular PDFДокумент121 страницаPhysics Honours Regular PDFBISWA RANJANОценок пока нет
- Hens FileДокумент22 страницыHens FileIlham DjafarОценок пока нет
- Scanning Electron MicroscopeДокумент6 страницScanning Electron MicroscopeRaza AliОценок пока нет
- Duracure WBC & WBWДокумент2 страницыDuracure WBC & WBWAman SahadeoОценок пока нет
- Resolver Vs EncoderДокумент7 страницResolver Vs EncoderAmirtha swamy.nОценок пока нет
- SOLA HD. 63-23-125-4: MCR Hardwired Series - Power Line Conditioning With Voltage RegulationДокумент4 страницыSOLA HD. 63-23-125-4: MCR Hardwired Series - Power Line Conditioning With Voltage RegulationluisnirvanaОценок пока нет
- NOMAD 65 VibratorsДокумент10 страницNOMAD 65 Vibratorshami hazarОценок пока нет
- Ed 00 (EN) PDFДокумент14 страницEd 00 (EN) PDFValentin draceaОценок пока нет
- 3 Ortloff NGL LPG and Sulfur Recovery TechnologiesДокумент47 страниц3 Ortloff NGL LPG and Sulfur Recovery TechnologiesYanto Hasudungan LumbantobingОценок пока нет
- LC1044 LRP14 3PH QRG 0823Документ2 страницыLC1044 LRP14 3PH QRG 0823FlakooОценок пока нет
- Internal Combustion Engine Heat Release Calculation Using Single Zone and CFD 3D Numerical ModelsДокумент12 страницInternal Combustion Engine Heat Release Calculation Using Single Zone and CFD 3D Numerical ModelsPinsteritОценок пока нет
- OiLibya Lubricants Guide InteractiveДокумент10 страницOiLibya Lubricants Guide Interactivehoussem houssem100% (1)
- IFP-Solar Panel Proposal FinalДокумент8 страницIFP-Solar Panel Proposal FinalzomatoguyОценок пока нет
- Reading Material ATEX ProcessДокумент14 страницReading Material ATEX ProcessABHISHEK DOLLEОценок пока нет
- Catalogue2014 PDFДокумент158 страницCatalogue2014 PDFاشرينكيل مسونكيل100% (1)
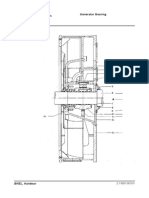
- 200 E 2 Floating Head Heat Exchanger MaintenanceДокумент16 страниц200 E 2 Floating Head Heat Exchanger Maintenancesubha50% (2)
- Building The Foundation - : On Scene Commander Development ProgramДокумент4 страницыBuilding The Foundation - : On Scene Commander Development ProgramSaran rasayaОценок пока нет
- Industrial Investment Promotion Policy: 2005-2010 Andhra PradeshДокумент31 страницаIndustrial Investment Promotion Policy: 2005-2010 Andhra PradeshVenkatesh KarnatiОценок пока нет
- YSM Series Air Handling UnitsДокумент20 страницYSM Series Air Handling UnitsVincent Aarón RodríguezОценок пока нет