Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Quality Standards For ECCE INDIA PDFДокумент41 страницаQuality Standards For ECCE INDIA PDFMaryam Ben100% (4)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- BPS C1: Compact All-Rounder in Banknote ProcessingДокумент2 страницыBPS C1: Compact All-Rounder in Banknote ProcessingMalik of ChakwalОценок пока нет
- Comparative Study of The New Generation, Agile, Scalable, High Performance NOSQL DatabasesДокумент4 страницыComparative Study of The New Generation, Agile, Scalable, High Performance NOSQL Databasesadityaa2064Оценок пока нет
- Number GenДокумент1 страницаNumber Genadityaa2064Оценок пока нет
- Char GenДокумент1 страницаChar Genadityaa2064Оценок пока нет
- Char GenДокумент1 страницаChar Genadityaa2064Оценок пока нет
- Paxos Made Simple: Leslie LamportДокумент16 страницPaxos Made Simple: Leslie Lamportadityaa2064Оценок пока нет
- Paxos Made Simple: Leslie LamportДокумент16 страницPaxos Made Simple: Leslie Lamportadityaa2064Оценок пока нет
- Exploring-Engineering-And-Technology-Grade-6 1Документ5 страницExploring-Engineering-And-Technology-Grade-6 1api-349870595Оценок пока нет
- Ilovepdf MergedДокумент503 страницыIlovepdf MergedHemantОценок пока нет
- Halloween EssayДокумент2 страницыHalloween EssayJonathan LamОценок пока нет
- Abnt NBR 16868 1 Alvenaria Estrutural ProjetoДокумент77 страницAbnt NBR 16868 1 Alvenaria Estrutural ProjetoGIOVANNI BRUNO COELHO DE PAULAОценок пока нет
- CIPD L5 EML LOL Wk3 v1.1Документ19 страницCIPD L5 EML LOL Wk3 v1.1JulianОценок пока нет
- Stress Management HandoutsДокумент3 страницыStress Management HandoutsUsha SharmaОценок пока нет
- Internal Resistance To Corrosion in SHS - To Go On WebsiteДокумент48 страницInternal Resistance To Corrosion in SHS - To Go On WebsitetheodorebayuОценок пока нет
- BДокумент28 страницBLubaОценок пока нет
- Swelab Alfa Plus User Manual V12Документ100 страницSwelab Alfa Plus User Manual V12ERICKОценок пока нет
- Names of Planner(s) : Style of Experience: (Whole Class, Small Group, Etc.) Lab: KindergartenДокумент4 страницыNames of Planner(s) : Style of Experience: (Whole Class, Small Group, Etc.) Lab: Kindergartenapi-428128701Оценок пока нет
- Spanish Greeting Card Lesson PlanДокумент5 страницSpanish Greeting Card Lesson Planrobert_gentil4528Оценок пока нет
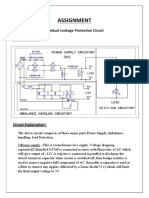
- Assignment: Residual Leakage Protection Circuit Circuit DiagramДокумент2 страницыAssignment: Residual Leakage Protection Circuit Circuit DiagramShivam ShrivastavaОценок пока нет
- Waves and Ocean Structures Journal of Marine Science and EngineeringДокумент292 страницыWaves and Ocean Structures Journal of Marine Science and Engineeringheinz billОценок пока нет
- Analisis Kebutuhan Bahan Ajar Berbasis EДокумент9 страницAnalisis Kebutuhan Bahan Ajar Berbasis ENur Hanisah AiniОценок пока нет
- ISO Position ToleranceДокумент15 страницISO Position ToleranceНиколай КалугинОценок пока нет
- Sony x300 ManualДокумент8 страницSony x300 ManualMarcosCanforaОценок пока нет
- Table of Reinforcement Anchorage Length & Lap Length - Eurocode 2Документ7 страницTable of Reinforcement Anchorage Length & Lap Length - Eurocode 2NgJackyОценок пока нет
- EPW, Vol.58, Issue No.44, 04 Nov 2023Документ66 страницEPW, Vol.58, Issue No.44, 04 Nov 2023akashupscmadeeaseОценок пока нет
- "Tell Me and I Forget, Teach Me and I May Remember, Involve MeДокумент1 страница"Tell Me and I Forget, Teach Me and I May Remember, Involve MeBesufkad Yalew YihunОценок пока нет
- Pam8610 PDFДокумент15 страницPam8610 PDFRaka Satria PradanaОценок пока нет
- KRAS QC12K-4X2500 Hydraulic Shearing Machine With E21S ControllerДокумент3 страницыKRAS QC12K-4X2500 Hydraulic Shearing Machine With E21S ControllerJohan Sneider100% (1)
- Inverter 2 chiềuДокумент2 страницыInverter 2 chiềuKhánh Nguyễn MinhОценок пока нет
- Anker Soundcore Mini, Super-Portable Bluetooth SpeakerДокумент4 страницыAnker Soundcore Mini, Super-Portable Bluetooth SpeakerM.SaadОценок пока нет
- Unit 1 PrinciplesДокумент17 страницUnit 1 PrinciplesRohit YadavОценок пока нет
- Moral GPS: A Positive Ethic For Our Multicultural WorldДокумент279 страницMoral GPS: A Positive Ethic For Our Multicultural WorldLeonard Bowman75% (4)
- Technical Sheet Racloflex NTДокумент2 страницыTechnical Sheet Racloflex NTAnthony AngОценок пока нет
- Digital Systems Project: IITB CPUДокумент7 страницDigital Systems Project: IITB CPUAnoushka DeyОценок пока нет
- KK AggarwalДокумент412 страницKK AggarwalEnrico Miguel AquinoОценок пока нет