Вам также может понравиться
- UDx2916 DatasheetДокумент10 страницUDx2916 DatasheetBruno NascimentoОценок пока нет
- A5800 and A5801: Discontinued ProductДокумент13 страницA5800 and A5801: Discontinued Productitamar_123Оценок пока нет
- A 2918 SW Data SheetДокумент8 страницA 2918 SW Data SheetGustavo LunaОценок пока нет
- Data Sheet Ic fr9886Документ14 страницData Sheet Ic fr9886Setya Budi S100% (1)
- Ncl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsДокумент10 страницNcl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsKhúc Hành QuânОценок пока нет
- Uc3842b 3843BДокумент10 страницUc3842b 3843Bbob75Оценок пока нет
- 5101 Motor DriverДокумент11 страниц5101 Motor DriverMoise CristinaОценок пока нет
- TL 496 DatasheetДокумент7 страницTL 496 DatasheetAnonymous vKD3FG6RkОценок пока нет
- A3953 DatasheetДокумент12 страницA3953 DatasheetMohan RajОценок пока нет
- Ucn 5801aДокумент12 страницUcn 5801aAhmad Kadafi HusinОценок пока нет
- MC34151 DДокумент12 страницMC34151 DMladen MuskinjaОценок пока нет
- Single Ended Active Clamp/Reset PWM: Features DescriptionДокумент16 страницSingle Ended Active Clamp/Reset PWM: Features Descriptioncatsoithahuong84Оценок пока нет
- D D D D D D D D D: DescriptionДокумент18 страницD D D D D D D D D: DescriptionNalin Lochan GuptaОценок пока нет
- Udn2916b PDFДокумент8 страницUdn2916b PDFSerchu_29Оценок пока нет
- IC 3842 para FonteДокумент8 страницIC 3842 para FonteTomNedscОценок пока нет
- S Feature D Escriptio: LTC1255 Dual 24V High-Side MOSFET DriverДокумент16 страницS Feature D Escriptio: LTC1255 Dual 24V High-Side MOSFET DriverMuhammed AsimОценок пока нет
- A3953 Datasheet PDFДокумент12 страницA3953 Datasheet PDFfelres87Оценок пока нет
- Isolated Flyback Switching Regulator W - 9V OutputДокумент16 страницIsolated Flyback Switching Regulator W - 9V OutputCasey DialОценок пока нет
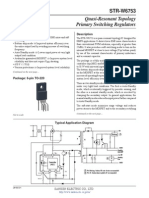
- Datasheet STR 6757Документ11 страницDatasheet STR 6757Walter CarreroОценок пока нет
- LTC 1625Документ24 страницыLTC 1625Sakura KunОценок пока нет
- HT7L4811 Non-Isolation Buck LED Lighting Driver With Active PFCДокумент12 страницHT7L4811 Non-Isolation Buck LED Lighting Driver With Active PFCEnéas BaroneОценок пока нет
- 1.5-A Peak Boost/Buck/Inverting Switching Regulators: FeaturesДокумент23 страницы1.5-A Peak Boost/Buck/Inverting Switching Regulators: FeaturesReinaldo VergaraОценок пока нет
- AX3102 Consists of Step-Down SwitchingДокумент8 страницAX3102 Consists of Step-Down SwitchingAgung DuemilanoveОценок пока нет
- TL 497 AДокумент20 страницTL 497 AJoaoОценок пока нет
- ST3232 Data SheetДокумент12 страницST3232 Data SheetcredioОценок пока нет
- TDA8139Документ5 страницTDA8139cosdeaОценок пока нет
- MC74HC541A Octal 3-State Non-Inverting Buffer/Line Driver/ Line ReceiverДокумент8 страницMC74HC541A Octal 3-State Non-Inverting Buffer/Line Driver/ Line ReceivernandobnuОценок пока нет
- A4989 DatasheetДокумент17 страницA4989 DatasheetGopalkrishnan Nadar100% (1)
- SN74CBTS16211 24-Bit Fet Bus Switch With Schottky Diode ClampingДокумент11 страницSN74CBTS16211 24-Bit Fet Bus Switch With Schottky Diode ClampingBa DuyОценок пока нет
- Mc33063a PDFДокумент23 страницыMc33063a PDFAnonymous QakmLc3kTIОценок пока нет
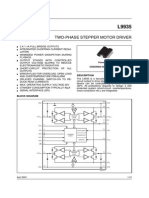
- Two-Phase Stepper Motor Driver: DescriptionДокумент19 страницTwo-Phase Stepper Motor Driver: DescriptionDan EsentherОценок пока нет
- Wide Input Voltage 3.0 A Step Down Regulator: Features and Benefits DescriptionДокумент10 страницWide Input Voltage 3.0 A Step Down Regulator: Features and Benefits Descriptioncdan99Оценок пока нет
- Bias Power Supply For TV and Monitor TFT LCD Panels: FeaturesДокумент30 страницBias Power Supply For TV and Monitor TFT LCD Panels: Featureseduinggv1829Оценок пока нет
- Data SheetДокумент12 страницData SheetMarcoAntonioCamanTraihuelОценок пока нет
- Precision Waveform Generator/Voltage Controlled Oscillator FeaturesДокумент12 страницPrecision Waveform Generator/Voltage Controlled Oscillator FeaturesCharles Tineo0% (1)
- Datasheet Fairchild UC3843Документ7 страницDatasheet Fairchild UC3843Tina JohnsonОценок пока нет
- SG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorДокумент10 страницSG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorJayesh SuryavanshiОценок пока нет
- Data SheetДокумент14 страницData SheetGavril GiurgiОценок пока нет
- Elevador VoltajeДокумент10 страницElevador VoltajeFernando AugustoОценок пока нет
- La 42205Документ7 страницLa 42205ban4444Оценок пока нет
- Transition-Mode PFC Controller: 1 FeaturesДокумент17 страницTransition-Mode PFC Controller: 1 Featuresadriancho66Оценок пока нет
- sg3525 ONДокумент10 страницsg3525 ONbob75Оценок пока нет
- Linear Technology LTC3728EG28400Документ37 страницLinear Technology LTC3728EG28400Rickz2k8Оценок пока нет
- STR W6753 DatasheetДокумент8 страницSTR W6753 DatasheetjgerabmОценок пока нет
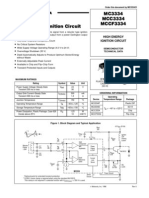
- Datasheet MC3334Документ6 страницDatasheet MC3334odipasОценок пока нет
- SA5888Документ8 страницSA5888albinicue1Оценок пока нет
- LCT B85TDU22H Service ManualДокумент59 страницLCT B85TDU22H Service ManualCristina NistorОценок пока нет
- Sla7024m (Motor Driver)Документ13 страницSla7024m (Motor Driver)Franklin Miranda RoblesОценок пока нет
- LT1510CSДокумент16 страницLT1510CSpetrovi482Оценок пока нет
- F2-08SIM Input Simulator D2-08NA-1 AC InputДокумент10 страницF2-08SIM Input Simulator D2-08NA-1 AC InputVladimir Aliro Quezada CidОценок пока нет
- D Escriptio: S FeatureДокумент8 страницD Escriptio: S Featurevsc2012Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОт EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsОт EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsРейтинг: 3 из 5 звезд3/5 (2)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1От EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Рейтинг: 4.5 из 5 звезд4.5/5 (3)
- C++ - Aula 31 - ListaДокумент4 страницыC++ - Aula 31 - ListaejoaomelchiorsОценок пока нет
- Fys 5211abx PDFДокумент4 страницыFys 5211abx PDFejoaomelchiorsОценок пока нет
- C++ - Aula 28 - Pilha - StackДокумент2 страницыC++ - Aula 28 - Pilha - StackejoaomelchiorsОценок пока нет
- C++ - Aula 30 - Fila - QueueДокумент2 страницыC++ - Aula 30 - Fila - QueueejoaomelchiorsОценок пока нет
- LV MaxSonar EZ DatasheetДокумент11 страницLV MaxSonar EZ Datasheetdenivaldo2009100% (2)
- Kollmorgen S300 Instruction Manual en Rev 02-2015Документ138 страницKollmorgen S300 Instruction Manual en Rev 02-2015ejoaomelchiorsОценок пока нет
- VFD-G Manual enДокумент183 страницыVFD-G Manual enEsteban Besso PianettoОценок пока нет
- Fys 5211abxДокумент4 страницыFys 5211abxejoaomelchiorsОценок пока нет
- PICkit™3 In-Circuit Debugger-Programmer User's GuideДокумент94 страницыPICkit™3 In-Circuit Debugger-Programmer User's Guidecorneliusflavius7132Оценок пока нет
- Mplabx Pickit3Документ1 страницаMplabx Pickit3Anthony SahuanayОценок пока нет
- A Modbus TCP Slave For ArduinoДокумент1 страницаA Modbus TCP Slave For ArduinoejoaomelchiorsОценок пока нет
- Hi 7190Документ25 страницHi 7190ejoaomelchiorsОценок пока нет
- GP2Y0A41SK0FДокумент9 страницGP2Y0A41SK0FVictor Kelly CristinaОценок пока нет
- Danaher Encoder HandbookДокумент16 страницDanaher Encoder HandbookatifkhushnoodОценок пока нет
- hướng dẫn sử dụng zenДокумент174 страницыhướng dẫn sử dụng zenHakula MatataОценок пока нет
- hướng dẫn sử dụng zenДокумент174 страницыhướng dẫn sử dụng zenHakula MatataОценок пока нет
- LTC2440 PDFДокумент28 страницLTC2440 PDFyusufwpОценок пока нет
- Adc - CS5530 - F3Документ36 страницAdc - CS5530 - F3usersdaОценок пока нет
- Manual ZEN 10C1AR V2 AmpliadaДокумент196 страницManual ZEN 10C1AR V2 AmpliadaFilipe CoimbraОценок пока нет
- Primer 1Документ4 страницыPrimer 1ejoaomelchiorsОценок пока нет
- Sensor de Fluxo de AguaДокумент7 страницSensor de Fluxo de AguaejoaomelchiorsОценок пока нет
- Basic Lamp DimmerДокумент2 страницыBasic Lamp DimmerejoaomelchiorsОценок пока нет
- 01064a PDFДокумент8 страниц01064a PDFfcbezerraОценок пока нет
- Amp Op Ad8657Документ24 страницыAmp Op Ad8657ejoaomelchiorsОценок пока нет
- IR Formats 1Документ5 страницIR Formats 1ejoaomelchiorsОценок пока нет
- Stepper Motor Speed ProfileДокумент5 страницStepper Motor Speed ProfileCharoensak Charayaphan100% (1)
- Fronius Solar Electronics Product Overview EN 153115 SnapshotДокумент29 страницFronius Solar Electronics Product Overview EN 153115 SnapshotflorazaharОценок пока нет
- Marvell Alaska 88E1116R: Single-Port Gigabit Ethernet Transceiver With Integrated PassivesДокумент2 страницыMarvell Alaska 88E1116R: Single-Port Gigabit Ethernet Transceiver With Integrated PassivesAnton NguyễnОценок пока нет
- Testing TypesДокумент42 страницыTesting TypesAdiOvidiuОценок пока нет
- CT X Ray TubesДокумент16 страницCT X Ray TubesKuber Neupane100% (3)
- Echipament ProtectieДокумент3 страницыEchipament ProtectieBaltoiu AurelianОценок пока нет
- 1986FujitsuMemoriesDatabook 894963362Документ1 176 страниц1986FujitsuMemoriesDatabook 894963362กิจรุ่งเรือง โพจันОценок пока нет
- Computer Architecture & Organization Unit 4Документ24 страницыComputer Architecture & Organization Unit 4Nihal Gupta100% (2)
- HD 74 Ls 00 PДокумент6 страницHD 74 Ls 00 PYagami007Оценок пока нет
- Guardamotor Siemens PDFДокумент57 страницGuardamotor Siemens PDFadolfovelasquezОценок пока нет
- AFC-1000 ManualДокумент44 страницыAFC-1000 Manualpaijo klimpritОценок пока нет
- Maquinas Electronicas CaterpillarДокумент46 страницMaquinas Electronicas CaterpillarJuan AmanquiОценок пока нет
- f00Документ83 страницыf00Rajeev Ranjan KumarОценок пока нет
- Rental AgreementДокумент2 страницыRental AgreementVillar MitchiОценок пока нет
- HT 66 KV Sf6 Circuit BreakerДокумент9 страницHT 66 KV Sf6 Circuit BreakerJoint Power ElectricalОценок пока нет
- Manual VXR Version 2.2Документ36 страницManual VXR Version 2.2Richard JonesОценок пока нет
- Assignment # 3 CHAPTERS# 1,2,3: CH#1 Answers To Review Qestions SECTION 1.1Документ34 страницыAssignment # 3 CHAPTERS# 1,2,3: CH#1 Answers To Review Qestions SECTION 1.1Naheed HameedОценок пока нет
- HUDA Layout - Golden Mile - Site - II, Kokapet - KokapetДокумент2 страницыHUDA Layout - Golden Mile - Site - II, Kokapet - KokapetPanduranga reddyОценок пока нет
- n900 Schematics PDFДокумент18 страницn900 Schematics PDFcarlcoxОценок пока нет
- PT PLN (Persero) Uikl Kalimantan Up3B Kalimantan Barat Sistem KhatulistiwaДокумент3 страницыPT PLN (Persero) Uikl Kalimantan Up3B Kalimantan Barat Sistem KhatulistiwaBagasОценок пока нет
- Second Order CircuitДокумент24 страницыSecond Order CircuitKJKSZPJ LXGIWYLОценок пока нет
- 9 MultimeterДокумент8 страниц9 MultimeterrameshОценок пока нет
- Lab 4Документ5 страницLab 4Алмас БейсебаевОценок пока нет
- NPM Linear Shaft Motor CatalogДокумент24 страницыNPM Linear Shaft Motor CatalogElectromateОценок пока нет
- BSCS 2016-20, 2017-21, 2018-22Документ167 страницBSCS 2016-20, 2017-21, 2018-22Hoorain CHОценок пока нет
- Acer 4535G-LA - 4921P Drawings PDFДокумент57 страницAcer 4535G-LA - 4921P Drawings PDFmasmujdiОценок пока нет
- CATALOG Camco-Manufacturing 07843Документ1 страницаCATALOG Camco-Manufacturing 07843Francisco RamirezОценок пока нет
- Scope of WorkДокумент28 страницScope of WorkShuhan Mohammad Ariful HoqueОценок пока нет
- 2023 Tiger Neo Product Introduction-2023-4-25Документ28 страниц2023 Tiger Neo Product Introduction-2023-4-25xNooMx NajaОценок пока нет
- Libra - Rfid Library With HF and Uhf TechnologyДокумент18 страницLibra - Rfid Library With HF and Uhf TechnologyLibbest RfidОценок пока нет
- BE3252 QB Unit2Документ2 страницыBE3252 QB Unit2rkanthimathi86Оценок пока нет