Вам также может понравиться
- Real-Time Image Processing Algorithms For Object and Distances Identification in Mobile Robot Trajectory PlanningДокумент6 страницReal-Time Image Processing Algorithms For Object and Distances Identification in Mobile Robot Trajectory PlanningamitsbhatiОценок пока нет
- Visibility TechniquesДокумент5 страницVisibility TechniquesArun GsОценок пока нет
- Polygon Rendering Methods and 3D Object RepresentationДокумент35 страницPolygon Rendering Methods and 3D Object RepresentationAswin KVОценок пока нет
- Detection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsДокумент6 страницDetection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsMounir El MaghraouiОценок пока нет
- CG6504 - Introduction to Computer GraphicsДокумент8 страницCG6504 - Introduction to Computer GraphicsAnonymous TvppppОценок пока нет
- Computer Graphics: Submitted To: Submitted By: Hardarshan Kaur Chandeep Arora RB1801B34 10804278Документ7 страницComputer Graphics: Submitted To: Submitted By: Hardarshan Kaur Chandeep Arora RB1801B34 10804278chandeeparora12Оценок пока нет
- RoboticsДокумент9 страницRoboticsKrishna Prakash NanduriОценок пока нет
- openAR DocumentationДокумент19 страницopenAR DocumentationEdwin ErdiyanaОценок пока нет
- Scale Estimation and Keypoint Description: Li YichengДокумент10 страницScale Estimation and Keypoint Description: Li Yichengapi-303634380Оценок пока нет
- Curvature Scale Space Based Image Corner DetectionДокумент4 страницыCurvature Scale Space Based Image Corner DetectionMuthu Vijay DeepakОценок пока нет
- Effect of noise on image contour in spectral domainДокумент54 страницыEffect of noise on image contour in spectral domainAhmed HwaidiОценок пока нет
- University of Zawia Faculty of Engineering: Performance of Different Transforms On Image ContourДокумент51 страницаUniversity of Zawia Faculty of Engineering: Performance of Different Transforms On Image ContourAhmed HwaidiОценок пока нет
- Asift AsiftДокумент11 страницAsift AsiftHaris MasoodОценок пока нет
- Object TrackДокумент5 страницObject TrackEngr EbiОценок пока нет
- Jordan1996 516 PDFДокумент12 страницJordan1996 516 PDFDeni ChanОценок пока нет
- Saveetha University Graphics and Animation Techniques Answer KeyДокумент16 страницSaveetha University Graphics and Animation Techniques Answer KeySubbu SspОценок пока нет
- A Robust License-Plate Extraction Method Under Complex Image ConditionsДокумент4 страницыA Robust License-Plate Extraction Method Under Complex Image ConditionsJames Yu100% (1)
- DSA Image Registration Based On Multiscale Gabor Filters and Mutual InformationДокумент6 страницDSA Image Registration Based On Multiscale Gabor Filters and Mutual InformationerdoganaaaОценок пока нет
- CS2401-Computer Graphics QBДокумент8 страницCS2401-Computer Graphics QBGopinath RamakrishnanОценок пока нет
- Rotation Invariance Neural Network Achieves 2-D Symbol RecognitionДокумент7 страницRotation Invariance Neural Network Achieves 2-D Symbol RecognitionwebsternhidzaОценок пока нет
- A Tracking Technology of Feature Point's Fuzzy Clustering Algorithm Based On Image StabilizationДокумент8 страницA Tracking Technology of Feature Point's Fuzzy Clustering Algorithm Based On Image StabilizationswoneraОценок пока нет
- Robust Band Profile Extraction Algorithm, Using Constrained N-P Machine Learning TechniqueДокумент4 страницыRobust Band Profile Extraction Algorithm, Using Constrained N-P Machine Learning TechniqueJoão SanchesОценок пока нет
- Poster Abstract Example1Документ1 страницаPoster Abstract Example1Negu SasoriОценок пока нет
- Presented By: Arz Kumar Satsangi & Vineet VermaДокумент26 страницPresented By: Arz Kumar Satsangi & Vineet VermagarunanarasОценок пока нет
- Computer GraphicsДокумент49 страницComputer GraphicsKarthi KeyanОценок пока нет
- ITS Master 15963 Paper PDFДокумент6 страницITS Master 15963 Paper PDFAbdelrahim Hussam MoubayedОценок пока нет
- Unit Iii Visual RealismДокумент59 страницUnit Iii Visual RealismJabin JoeОценок пока нет
- Fuculty of Informatics Departement of Computer ScienceДокумент16 страницFuculty of Informatics Departement of Computer Sciencesamuel fikiruОценок пока нет
- Indoor Space 3D Visual ReconstructionДокумент7 страницIndoor Space 3D Visual ReconstructionPrince BlissfulОценок пока нет
- RTU Solution 5CS4-04 Computer Graphics & MultimediaДокумент43 страницыRTU Solution 5CS4-04 Computer Graphics & MultimediaShrinath TailorОценок пока нет
- Adaptive CSS Corner Detector for Images with Multiple ScalesДокумент4 страницыAdaptive CSS Corner Detector for Images with Multiple ScalesGago RomeroОценок пока нет
- RBE - 3002 - Lab - 4 ReportДокумент7 страницRBE - 3002 - Lab - 4 ReportZachary RiverniderОценок пока нет
- Fast and Subpixel Precise Blob Detection and AttributionДокумент4 страницыFast and Subpixel Precise Blob Detection and AttributionFelix FergosenОценок пока нет
- Segmentation of Range and Intensity Image Sequences by ClusteringДокумент5 страницSegmentation of Range and Intensity Image Sequences by ClusteringSeetha ChinnaОценок пока нет
- Denoising and Edge Detection Using SobelmethodДокумент6 страницDenoising and Edge Detection Using SobelmethodIJMERОценок пока нет
- CG Graphics: 2D Viewing Coordinate SystemsДокумент80 страницCG Graphics: 2D Viewing Coordinate SystemsDebashis DasОценок пока нет
- (X) Small Object Detection and Tracking - Algorithm, Analysis and Application (2005)Документ10 страниц(X) Small Object Detection and Tracking - Algorithm, Analysis and Application (2005)Hira RasabОценок пока нет
- CS212-Graphics and MultimediaДокумент9 страницCS212-Graphics and Multimediatn_thangaveluОценок пока нет
- Computer Graphics & MultimediaДокумент9 страницComputer Graphics & MultimediaMathan NaganОценок пока нет
- A Vision-Based Algorithm For Landing Unmanned Aerial VehiclesДокумент4 страницыA Vision-Based Algorithm For Landing Unmanned Aerial VehiclesSalman Ahmed KhanОценок пока нет
- Kalman 3. Robot PaltillДокумент9 страницKalman 3. Robot PaltillTrung KiênОценок пока нет
- Computer Graphics MethodsДокумент9 страницComputer Graphics Methodsrockafella91100% (1)
- Contour Detection and Hierarchical Image SegmentationДокумент19 страницContour Detection and Hierarchical Image SegmentationQuynhtrang NguyenОценок пока нет
- Rotation Invariant Neural Network Face DetectionДокумент7 страницRotation Invariant Neural Network Face DetectionDao_Van_HiepОценок пока нет
- Graphics 4Документ16 страницGraphics 4Surendra Singh ChauhanОценок пока нет
- A. Splitting of Fractograph Into SubpartsДокумент2 страницыA. Splitting of Fractograph Into SubpartsSiddhartha BanerjeeОценок пока нет
- Feature-Based Laser Scan Matching for Accurate Mobile Robot LocalizationДокумент6 страницFeature-Based Laser Scan Matching for Accurate Mobile Robot LocalizationhenrydclОценок пока нет
- Introduction To Open GL: by Rama Satish KV Visiting Professor, WASEДокумент38 страницIntroduction To Open GL: by Rama Satish KV Visiting Professor, WASEsatishkvrОценок пока нет
- Eye Detection Project ReportДокумент8 страницEye Detection Project ReportKaif KhanОценок пока нет
- Stairway Detection Based On Single Camera by Motion StereoДокумент10 страницStairway Detection Based On Single Camera by Motion StereoeProcurement Reviewer1Оценок пока нет
- CD Paper Pag 179Документ10 страницCD Paper Pag 179Anonymous lEBdswQXmxОценок пока нет
- Alternative To Feature Matching - High Precision Relative LocalizationДокумент7 страницAlternative To Feature Matching - High Precision Relative LocalizationGaurav VermaОценок пока нет
- EKF SLAM Implementation for Visual Odometry DataДокумент39 страницEKF SLAM Implementation for Visual Odometry DataCristhian Aparcana RomanОценок пока нет
- Chapter 4 DraftДокумент8 страницChapter 4 DraftChester Paul H. IbarrientosОценок пока нет
- Eltoukhy Salama ReportДокумент22 страницыEltoukhy Salama ReportSaeideh OraeiОценок пока нет
- Geometry of Image Formation - LearnOpenCV #Документ7 страницGeometry of Image Formation - LearnOpenCV #KajalОценок пока нет
- Realtime Omnidirectional Stereo For Obstacle Detection and Tracking in Dynamic EnvironmentsДокумент6 страницRealtime Omnidirectional Stereo For Obstacle Detection and Tracking in Dynamic Environmentsestraj1954Оценок пока нет
- Robot Vision: Y. ShiraiДокумент28 страницRobot Vision: Y. ShiraiRogelio Portillo VelezОценок пока нет
- Obj TrackДокумент4 страницыObj TrackEngr EbiОценок пока нет
- Quantitative Management For AnalysisДокумент4 страницыQuantitative Management For AnalysisGuruKPOОценок пока нет
- Linear Programming Problems - FormulationДокумент55 страницLinear Programming Problems - FormulationJagannath Padhi100% (1)
- Artificial IntelligenceДокумент7 страницArtificial IntelligencePrarthi BhoirОценок пока нет
- Factors Affecting Career Choices of Grade 12 StudentsДокумент6 страницFactors Affecting Career Choices of Grade 12 StudentsJenneth Cabinto DalisanОценок пока нет
- Method of Differentiation DPP - 7Документ3 страницыMethod of Differentiation DPP - 7tanayОценок пока нет
- Performance Evaluation and Improvement in Education Sector using Bayesian Classification Algorithm - A SurveyДокумент5 страницPerformance Evaluation and Improvement in Education Sector using Bayesian Classification Algorithm - A SurveyYathish143Оценок пока нет
- Modal Analysis Methods - Frequency DomainДокумент1 страницаModal Analysis Methods - Frequency DomainjcvalenciaОценок пока нет
- The LLL AlgorithmsДокумент503 страницыThe LLL AlgorithmsCom DigfulОценок пока нет
- Tpms - DSP Productivity Review Sheet For Month EndingДокумент1 страницаTpms - DSP Productivity Review Sheet For Month EndingvamshivarkutiОценок пока нет
- Local Pattern Transformation Based Feature Extraction PDFДокумент12 страницLocal Pattern Transformation Based Feature Extraction PDFVikram VermaОценок пока нет
- David M. Burton - Elementary Number Theory, 5th Edition (2002)Документ429 страницDavid M. Burton - Elementary Number Theory, 5th Edition (2002)shashvatjoshiОценок пока нет
- (Numpy) - Extended CheatsheetДокумент8 страниц(Numpy) - Extended CheatsheetValdano SODEОценок пока нет
- Thermodynamic Potentials ExplainedДокумент16 страницThermodynamic Potentials ExplainedMarco DonatielloОценок пока нет
- Quantifying Uncertainty in Pls Sem Based Mediation AnalysesДокумент11 страницQuantifying Uncertainty in Pls Sem Based Mediation AnalysesAlessandra CassolОценок пока нет
- Privacy-Preserving and Truthful Detection of Packet Dropping Attacks in WirelessAd Hoc Networks PDFДокумент16 страницPrivacy-Preserving and Truthful Detection of Packet Dropping Attacks in WirelessAd Hoc Networks PDFNavya Sri AddagarlaОценок пока нет
- Slides 4 (Routh, Root Locus)Документ51 страницаSlides 4 (Routh, Root Locus)Felistus KavuuОценок пока нет
- Solver User GuideДокумент450 страницSolver User GuideChinmay SahooОценок пока нет
- CSE322 SET - A ETE MCQsДокумент4 страницыCSE322 SET - A ETE MCQsGarvit JoshiОценок пока нет
- Implementing Metaheuristic Algoritham: (Genetic Algorithm) Objective Lab Tasks: CodeДокумент9 страницImplementing Metaheuristic Algoritham: (Genetic Algorithm) Objective Lab Tasks: CodeRameez FazalОценок пока нет
- Currency Recognition System Using Image ProcessingДокумент3 страницыCurrency Recognition System Using Image ProcessingkashmiraОценок пока нет
- Topic Models and Latent Dirichlet AllocationДокумент2 страницыTopic Models and Latent Dirichlet AllocationNaveed MastanОценок пока нет
- Synthetic Division GuideДокумент5 страницSynthetic Division GuideMabz Bell Amiscosa100% (2)
- 3PA07 - 11519645 - Demita Riassekar Cututri 8-Puzzles - IpynbДокумент6 страниц3PA07 - 11519645 - Demita Riassekar Cututri 8-Puzzles - Ipynb3PA07 Demita Riassekar CututriОценок пока нет
- Skillsheet-15E - Cambridge VCE Further MathematicsДокумент7 страницSkillsheet-15E - Cambridge VCE Further MathematicsPОценок пока нет
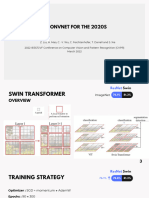
- ConvNet For The 2020sДокумент12 страницConvNet For The 2020sHamza OKDОценок пока нет
- Question Bank (Multiple Choice Questions)Документ33 страницыQuestion Bank (Multiple Choice Questions)A-z knowledgeОценок пока нет
- Find Maximum Element Index in ArrayДокумент6 страницFind Maximum Element Index in Arraysiddharth1kОценок пока нет
- Chapter 5 - Authentication and Encryption TechnologyДокумент13 страницChapter 5 - Authentication and Encryption TechnologyPabbura_HatiОценок пока нет
- Data Structures & Algorithm Course Outline PDFДокумент2 страницыData Structures & Algorithm Course Outline PDFAmmar Ajmal0% (1)
- Decision Tree: "For Each Node of The Tree, The Information Value MeasuresДокумент3 страницыDecision Tree: "For Each Node of The Tree, The Information Value MeasuresAditya Narain SinghОценок пока нет