Вам также может понравиться
- Medición de Impedancia para Funciones de Protección en Sistemas Eléctricos de PotenciaДокумент10 страницMedición de Impedancia para Funciones de Protección en Sistemas Eléctricos de PotenciaguillermocochaОценок пока нет
- Aplicación de La Transformada Ondita en Estudios de Calidad EléctricaДокумент13 страницAplicación de La Transformada Ondita en Estudios de Calidad EléctricaguillermocochaОценок пока нет
- Construcción, Armado y Pruebas Eléctricas de Un Stack de CelДокумент10 страницConstrucción, Armado y Pruebas Eléctricas de Un Stack de CelguillermocochaОценок пока нет
- Guia para La Presentaciã N de Proyectos PICT START UPДокумент14 страницGuia para La Presentaciã N de Proyectos PICT START UPjccasal1Оценок пока нет
- Resol. Elecciones Generales 2018Документ5 страницResol. Elecciones Generales 2018guillermocochaОценок пока нет
- Ordenanza 962 UTNДокумент44 страницыOrdenanza 962 UTNguillermocochaОценок пока нет
- Fourie A FondoДокумент33 страницыFourie A FondoZealot1633Оценок пока нет
- Calendar I o Academic o 2018Документ2 страницыCalendar I o Academic o 2018guillermocochaОценок пока нет
- Ley 26.508 Jubilaciones Docentes UniversitariosДокумент3 страницыLey 26.508 Jubilaciones Docentes UniversitariosguillermocochaОценок пока нет
- Fourie A FondoДокумент33 страницыFourie A FondoZealot1633Оценок пока нет
- Guia para Estudio de Mercado-Para Ventanilla PermanenteДокумент2 страницыGuia para Estudio de Mercado-Para Ventanilla PermanenteguillermocochaОценок пока нет
- Programa WAVETI.2016Документ1 страницаPrograma WAVETI.2016guillermocochaОценок пока нет
- Reglamento de Posgrado UTNДокумент52 страницыReglamento de Posgrado UTNguillermocochaОценок пока нет
- Construcción, Armado y Pruebas Eléctricas de Un Stack de CelДокумент10 страницConstrucción, Armado y Pruebas Eléctricas de Un Stack de CelguillermocochaОценок пока нет
- Cur Sos Docent e 2015Документ1 страницаCur Sos Docent e 2015guillermocochaОценок пока нет
- Programas de Los CursosДокумент4 страницыProgramas de Los CursosguillermocochaОценок пока нет
- Plan de Estudios 754Документ2 страницыPlan de Estudios 754guillermocochaОценок пока нет
- Resolucion 1480Документ4 страницыResolucion 1480guillermocochaОценок пока нет
- CartillaPrestadores La PlataДокумент3 страницыCartillaPrestadores La PlataguillermocochaОценок пока нет
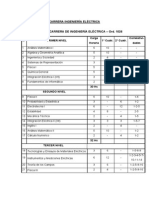
- Ingeniería EléctricaДокумент4 страницыIngeniería EléctricaguillermocochaОценок пока нет
- Practicas ProfesionalizanteДокумент5 страницPracticas ProfesionalizanteguillermocochaОценок пока нет
- Acta UtnДокумент78 страницActa UtnguillermocochaОценок пока нет
- Anatomia QuirurgicaДокумент6 страницAnatomia QuirurgicaMatt AriasОценок пока нет
- Diseño de Una Mezcladora de ConcretoДокумент175 страницDiseño de Una Mezcladora de Concretonnoriegam86Оценок пока нет
- Fundamentos de Atencion e Instrumentacion QuirurgicaДокумент26 страницFundamentos de Atencion e Instrumentacion QuirurgicaguillermocochaОценок пока нет
- Problemas de Historia Argentina 11-03-2014 PDFДокумент133 страницыProblemas de Historia Argentina 11-03-2014 PDFAlejandra Zeme100% (1)
- Instalacion y Mantenimiento de Motores Electricos Trifasicos Modulo 10Документ277 страницInstalacion y Mantenimiento de Motores Electricos Trifasicos Modulo 10jheffred1893% (58)
- Bio SeguridadДокумент6 страницBio SeguridadguillermocochaОценок пока нет
- Practicas Culturales 2014Документ136 страницPracticas Culturales 2014lauraitttОценок пока нет
- Taller Lectura y Escritura - 2014Документ200 страницTaller Lectura y Escritura - 2014Paula Bein100% (3)
- Formato Nuevo NCRДокумент1 страницаFormato Nuevo NCRramon coss lopezОценок пока нет
- Soja: prácticas, daños, intereses y cambiosДокумент1 страницаSoja: prácticas, daños, intereses y cambiosLorena GallardoОценок пока нет
- Folleto Piso Tecnico ADfloor - ATДокумент5 страницFolleto Piso Tecnico ADfloor - ATNeiser VillanuevaОценок пока нет
- Cuestionario G5Документ4 страницыCuestionario G5FLOR DE MARIA GUTIERREZ LEALОценок пока нет
- Análisis del traslado del edificio Cudecom de 29 metrosДокумент4 страницыAnálisis del traslado del edificio Cudecom de 29 metrosANDREA AVILA REYESОценок пока нет
- Calculo Lagtime CompletoДокумент10 страницCalculo Lagtime CompletoFranklin AlmeraОценок пока нет
- Comandos Del DДокумент3 страницыComandos Del DNick NicolasОценок пока нет
- Problemas de calidad y variabilidad funcionalДокумент2 страницыProblemas de calidad y variabilidad funcionalAbraham Vega OrtegaОценок пока нет
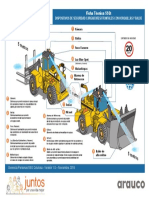
- Ficha Técnica SSO Dispositivos de Seguridad Cargadores Frontales Con Horquillas y BaldeДокумент1 страницаFicha Técnica SSO Dispositivos de Seguridad Cargadores Frontales Con Horquillas y BaldeCamilo Milo100% (1)
- Laboratorio 7.1 Generador SíncronoДокумент10 страницLaboratorio 7.1 Generador SíncronoJoe Huanca Rivera100% (1)
- Trabajo Curso Procesos de ManufacturaДокумент3 страницыTrabajo Curso Procesos de ManufacturaRoberto MartinezОценок пока нет
- Play ComicДокумент7 страницPlay ComicVictor AlcoОценок пока нет
- Contabilidad II tarea #4 mapa mental y ejercicios P7-25A y P7-26AДокумент2 страницыContabilidad II tarea #4 mapa mental y ejercicios P7-25A y P7-26AOdalis HernandezОценок пока нет
- Análisis de La Película "Detrás de La Pizarra"Документ6 страницAnálisis de La Película "Detrás de La Pizarra"Jairo HerreraОценок пока нет
- Actividad 1 Interpretacion de Planos (POR REALIZAR)Документ7 страницActividad 1 Interpretacion de Planos (POR REALIZAR)Marian NataliaОценок пока нет
- JFLAP introducción autómatasДокумент7 страницJFLAP introducción autómatasCarlos Andrés VivasОценок пока нет
- Examen de Navegacion JeppesenДокумент4 страницыExamen de Navegacion JeppesenCapitan HermesОценок пока нет
- 03-Catálogo Goulds-SSH PDFДокумент36 страниц03-Catálogo Goulds-SSH PDFPaul WaldronОценок пока нет
- Ejemplo de PortadaДокумент2 страницыEjemplo de PortadaJuan VargasОценок пока нет
- Showroom - KIA RIO - Especificaciones - Kia Motors MéxicoДокумент6 страницShowroom - KIA RIO - Especificaciones - Kia Motors MéxicoarnoldОценок пока нет
- Mis AccionesДокумент3 страницыMis AccionesCarlos GBОценок пока нет
- Nuevas Tendencias de La Administración Industria 4.0Документ19 страницNuevas Tendencias de La Administración Industria 4.0Oscar SaldañaОценок пока нет
- QS9000Документ50 страницQS9000Sergio BoillosОценок пока нет
- Exposicion de ProcesadoresДокумент21 страницаExposicion de ProcesadoresJose Jimenez Coto100% (1)
- Presentación Diapositivas Proceso Gestión DocumentalДокумент22 страницыPresentación Diapositivas Proceso Gestión DocumentalJuan De Jesus MontenegroОценок пока нет
- Actividad de Semana 1Документ3 страницыActividad de Semana 1MaylethReyesОценок пока нет
- 9-Artículo Original-187-1-10-20160512Документ7 страниц9-Artículo Original-187-1-10-20160512Diego VegaОценок пока нет
- Matriz EfeДокумент16 страницMatriz EfeDeniz Denilson100% (2)
- Herramientas de Calidad SIRДокумент59 страницHerramientas de Calidad SIRjuanvg88100% (1)