Вам также может понравиться
- 17.lecture 27 Finite Element Derivation PDFДокумент17 страниц17.lecture 27 Finite Element Derivation PDFKarina NaudéОценок пока нет
- Lecture 3Документ15 страницLecture 3ansgcekОценок пока нет
- Stress Balance Principles 03 The Cauchy Stress TensorДокумент5 страницStress Balance Principles 03 The Cauchy Stress Tensorsmishra0Оценок пока нет
- Drawing A Lumley TriangleДокумент4 страницыDrawing A Lumley TrianglegoldenthangamОценок пока нет
- 3 - Stress TensorДокумент23 страницы3 - Stress TensorRishan Joshua DsilvaОценок пока нет
- 101 PDFДокумент21 страница101 PDFThaung Myint OoОценок пока нет
- 4.1 Principal Stresses and Principal Stress AxesДокумент21 страница4.1 Principal Stresses and Principal Stress Axes4114018Оценок пока нет
- MIT2 080JF13 Lecture2 PDFДокумент26 страницMIT2 080JF13 Lecture2 PDFAbhilashJanaОценок пока нет
- 1 - Load and Stress AnalysisДокумент27 страниц1 - Load and Stress AnalysisAyesha KhanОценок пока нет
- in This Module Text in "Italic" Indicates Advanced Concepts. 2., Are Used For Shear' in Books and LiteratureДокумент35 страницin This Module Text in "Italic" Indicates Advanced Concepts. 2., Are Used For Shear' in Books and LiteratureKanti SolankiОценок пока нет
- J2Документ8 страницJ2onnly1964Оценок пока нет
- Stress, Strain, and Constitutive RelationsДокумент23 страницыStress, Strain, and Constitutive RelationsMekro Permana PinemОценок пока нет
- Principal StressesДокумент13 страницPrincipal StressesSathish SelvaОценок пока нет
- Introduction of Solid Mechanics (ME 621) : Problem 1Документ4 страницыIntroduction of Solid Mechanics (ME 621) : Problem 1Ritunjay JhaОценок пока нет
- HW 1 SolutionДокумент9 страницHW 1 SolutionbharathОценок пока нет
- CM LC1Документ28 страницCM LC1Eng W EaОценок пока нет
- Brief Introduction To Continuum Mechanics Deviatoric Stress and Strain PDFДокумент33 страницыBrief Introduction To Continuum Mechanics Deviatoric Stress and Strain PDFdhakal.binaya07Оценок пока нет
- Finite Element AnalysisДокумент9 страницFinite Element Analysishas960Оценок пока нет
- Mirzaei ElasticityLectureДокумент127 страницMirzaei ElasticityLectureNagar NitinОценок пока нет
- Chapter2 PDFДокумент18 страницChapter2 PDFamirthraj74Оценок пока нет
- Vectors and TensorsДокумент13 страницVectors and TensorsBittuОценок пока нет
- Stress TensorsДокумент3 страницыStress TensorsaladinsaneОценок пока нет
- Lin Stab AnalysisДокумент7 страницLin Stab AnalysisMohammad RameezОценок пока нет
- Vibrations of Thick Cylindrical StructuresДокумент14 страницVibrations of Thick Cylindrical StructuresAnonymous PT8OGe0Z100% (1)
- Module 1 With SolutionsДокумент28 страницModule 1 With SolutionsMehmet MehmetОценок пока нет
- Governing Equations For Fluid Motion: K W J V I U VДокумент16 страницGoverning Equations For Fluid Motion: K W J V I U VKelvin SudaniОценок пока нет
- Matrix and Index Notation PDFДокумент3 страницыMatrix and Index Notation PDFChristian MavarezОценок пока нет
- 3.1. Definition of The Stiffness MatrixДокумент32 страницы3.1. Definition of The Stiffness Matrixfatih_hideОценок пока нет
- Ch#3 Truss EquationsДокумент59 страницCh#3 Truss EquationsMuhammad Fazjri Karta WijayaОценок пока нет
- ConstantДокумент4 страницыConstanthaseeb ansariОценок пока нет
- Chap 1. Stress-Strain AnalysisДокумент36 страницChap 1. Stress-Strain Analysisteknikpembakaran2013Оценок пока нет
- Elasticity Theory BasisДокумент9 страницElasticity Theory BasisGiovanni Morais TeixeiraОценок пока нет
- Scientific Manual V8Документ36 страницScientific Manual V8SilvioCarrilloОценок пока нет
- Plane Stress and Plane Strain: 4.2.1 Displacement FunctionsДокумент25 страницPlane Stress and Plane Strain: 4.2.1 Displacement FunctionswearplayОценок пока нет
- PART4 Tensor CalculusДокумент43 страницыPART4 Tensor CalculusAjoy SharmaОценок пока нет
- CEng 6501 ToE (Chapter 2)Документ20 страницCEng 6501 ToE (Chapter 2)Fowzi MohammedОценок пока нет
- CEng 6501 ToE (Chapter 2)Документ20 страницCEng 6501 ToE (Chapter 2)Fowzi MohammedОценок пока нет
- Heinbockel - Tensor Calculus - PartДокумент43 страницыHeinbockel - Tensor Calculus - Partapi-3835172Оценок пока нет
- Chapter IДокумент40 страницChapter IsteigmannОценок пока нет
- Tensor NotationДокумент23 страницыTensor NotationRakshak DhungelОценок пока нет
- 3D StressДокумент42 страницы3D Stresswsjouri2510100% (1)
- Bending Stress of BeamsДокумент18 страницBending Stress of BeamsRambabu RОценок пока нет
- Stresses: 2.1 General TheoryДокумент25 страницStresses: 2.1 General TheoryLocoo Goku YoshiiОценок пока нет
- Chapter 01Документ42 страницыChapter 01Harry GalungОценок пока нет
- Elasticity AiryStressДокумент19 страницElasticity AiryStressAdari SagarОценок пока нет
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsОт EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsОценок пока нет
- Beams and Framed Structures: Structures and Solid Body MechanicsОт EverandBeams and Framed Structures: Structures and Solid Body MechanicsРейтинг: 3 из 5 звезд3/5 (2)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОт EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОценок пока нет
- Balanced and Unbalanced Mechanical SealДокумент3 страницыBalanced and Unbalanced Mechanical SealmasoodkamalОценок пока нет
- AISI 304 Vs 304L Stainless Steel Properties (UNS S30403) Difference Between 304 and 304L (SS304L)Документ6 страницAISI 304 Vs 304L Stainless Steel Properties (UNS S30403) Difference Between 304 and 304L (SS304L)masoodkamalОценок пока нет
- Shielding Catalog Tech EtchДокумент52 страницыShielding Catalog Tech EtchmasoodkamalОценок пока нет
- FATEMI Lecture On Fatigue (Must Read Again and Again)Документ94 страницыFATEMI Lecture On Fatigue (Must Read Again and Again)masoodkamal100% (1)
- Finite Element Modelling Techniques in MSC NASTRAN and LS DYNAДокумент172 страницыFinite Element Modelling Techniques in MSC NASTRAN and LS DYNAsreejit7777% (13)
- Fine Element Method Using NastranДокумент84 страницыFine Element Method Using Nastranirbar.darmansyah.alwiОценок пока нет
- 2019-A Water-Resilient Carbon Nanotube Based Strain Sensor For Monitoring Structural IntegrityДокумент10 страниц2019-A Water-Resilient Carbon Nanotube Based Strain Sensor For Monitoring Structural Integrity戴犇辉Оценок пока нет
- Nazli Azimikor - Composite Deck Design ReportДокумент23 страницыNazli Azimikor - Composite Deck Design ReportDani TorzОценок пока нет
- Catálogo Greenleaf PDFДокумент52 страницыCatálogo Greenleaf PDFAnonymous TqRycNChОценок пока нет
- Simplified Concrete Modeling With Mat - Concrete - Damage - Rel3: Leonard E SchwerДокумент14 страницSimplified Concrete Modeling With Mat - Concrete - Damage - Rel3: Leonard E Schwersvk_ntОценок пока нет
- Failure of Diesel-Engine CrankshaftsДокумент11 страницFailure of Diesel-Engine CrankshaftsmirosekОценок пока нет
- Ductile Detailing of BeamДокумент12 страницDuctile Detailing of BeamParth AnajwalaОценок пока нет
- Astm D-3518-01Документ7 страницAstm D-3518-01Gabriel GuerreiroОценок пока нет
- Heat and Mass Transfer (Subject Code: KME 501) Unit Introduction To Heat TransferДокумент2 страницыHeat and Mass Transfer (Subject Code: KME 501) Unit Introduction To Heat TransferRajeev100% (2)
- Dynamic StiffnessДокумент6 страницDynamic StiffnessArshadahcОценок пока нет
- CT212 Course Outline 2019Документ3 страницыCT212 Course Outline 2019Flex GodОценок пока нет
- Introduction To ANSYS Mechanical: Static Structural AnalysisДокумент46 страницIntroduction To ANSYS Mechanical: Static Structural AnalysisAllan MarbaniangОценок пока нет
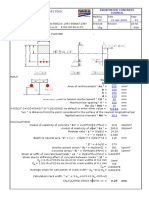
- 2.1 Doubly Reinforcement Beams (Week 2)Документ12 страниц2.1 Doubly Reinforcement Beams (Week 2)stylistikОценок пока нет
- Name-Rishav Kumar REG NO-17BCM0026 Slot-E1 Course-Polymer Technology Course Code-Che1019 DATE-20-01-19Документ10 страницName-Rishav Kumar REG NO-17BCM0026 Slot-E1 Course-Polymer Technology Course Code-Che1019 DATE-20-01-19RishavОценок пока нет
- Crack Width Check BS5400 4Документ7 страницCrack Width Check BS5400 4Alden CayagaОценок пока нет
- Member Check 60x60x5 RSA (Top & Bottom Boom)Документ10 страницMember Check 60x60x5 RSA (Top & Bottom Boom)Bobor Emmanuel OfovweОценок пока нет
- Lai BinglinДокумент22 страницыLai BinglinNicholas Chin Yong LekОценок пока нет
- Ternary Phase Diagram - DevikaДокумент16 страницTernary Phase Diagram - DevikaVavachi vavaОценок пока нет
- Tensile and Fatigue of Al2o3Документ10 страницTensile and Fatigue of Al2o3Samuel ManoharОценок пока нет
- Green Behaviour Reinforced 1985 PDFДокумент91 страницаGreen Behaviour Reinforced 1985 PDFtevredeОценок пока нет
- Steel Expert ECДокумент34 страницыSteel Expert ECcamagaОценок пока нет
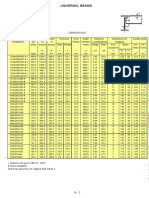
- BS Section PDFДокумент96 страницBS Section PDFUpendra WalinjkarОценок пока нет
- Homework Solution For Modes FailureДокумент4 страницыHomework Solution For Modes FailurelilyОценок пока нет
- Spreadsheets To BS 8110etc: Advisory Group Grid Line 1 RC 21-Apr-2020 33 CHG - R68Документ4 страницыSpreadsheets To BS 8110etc: Advisory Group Grid Line 1 RC 21-Apr-2020 33 CHG - R68Vikash PeerthyОценок пока нет
- Design of Large Footings For One Way ShearДокумент8 страницDesign of Large Footings For One Way ShearAsad SohailОценок пока нет
- BoltsДокумент6 страницBoltsJuragan IwalОценок пока нет
- Chapter 3. Chain-Growth (Addition) PolymerizationДокумент28 страницChapter 3. Chain-Growth (Addition) Polymerizationafic219473Оценок пока нет
- Thermal Stress RumusДокумент16 страницThermal Stress RumusVakin Agung PermanaОценок пока нет
- Solid State ElectrolyteДокумент16 страницSolid State Electrolytekhan445585Оценок пока нет
- Preliminaries RC BeamsДокумент13 страницPreliminaries RC BeamsPeter Harold MaducdocОценок пока нет
- Example Calculation of Effective Section Properties For A Cold-Formed Lipped Channel Section in BendingДокумент10 страницExample Calculation of Effective Section Properties For A Cold-Formed Lipped Channel Section in Bendingcbler100% (10)