Вам также может понравиться
- Tipos de AmplificadoresДокумент8 страницTipos de AmplificadoresJose Lopez AyalaОценок пока нет
- Com PensAdoresДокумент18 страницCom PensAdoresJose Lopez AyalaОценок пока нет
- Tarea de Circuitos 2Документ7 страницTarea de Circuitos 2Jose Lopez AyalaОценок пока нет
- Tarea de Circuitos 2Документ7 страницTarea de Circuitos 2Jose Lopez AyalaОценок пока нет
- Simulación Pyrosim incendio edificioДокумент22 страницыSimulación Pyrosim incendio edificioJosé Stalin Santos CastilloОценок пока нет
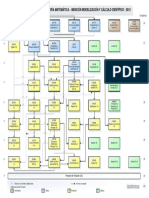
- Malla Curricular Ing Matematica Mencion Modelizacion PDFДокумент1 страницаMalla Curricular Ing Matematica Mencion Modelizacion PDFbartolome777ooОценок пока нет
- Bacon - Pintar Las FuerzasДокумент5 страницBacon - Pintar Las FuerzasRaimon RiberaОценок пока нет
- Teoria Del ProductorДокумент5 страницTeoria Del ProductorLuis Carlos NОценок пока нет
- Informe Final de Laboratorio de Agregados-1Документ20 страницInforme Final de Laboratorio de Agregados-1HTB videos youtubeОценок пока нет
- INFORME N°4. Modulo de Traccion DirectaДокумент14 страницINFORME N°4. Modulo de Traccion DirectaSkarleth RamosОценок пока нет
- AtsДокумент2 страницыAtsPercy PL0% (1)
- AceroДокумент6 страницAceroAnonymous BRNFYRBzbОценок пока нет
- SST Centralizado para Edificios MultiviviendaДокумент12 страницSST Centralizado para Edificios MultiviviendaHans Hofmann MОценок пока нет
- NEWTON RAPHSON Modelado FINALДокумент5 страницNEWTON RAPHSON Modelado FINALJonathan Andrés PullasОценок пока нет
- Rom 0.5-05Документ546 страницRom 0.5-05Pablo RincónОценок пока нет
- Sensores de TemperaturaДокумент58 страницSensores de TemperaturaSherlin Almanza ObregonОценок пока нет
- Informe Pdp2013 SaterfiДокумент27 страницInforme Pdp2013 SaterfiAldo YabarОценок пока нет
- SassanoДокумент29 страницSassanoJuan Pablo Galvez Gonzalez100% (3)
- Diagramas Binarios y TernariosДокумент38 страницDiagramas Binarios y TernariosAna Hernández100% (1)
- Fluorescencia de Rayos XДокумент4 страницыFluorescencia de Rayos XAna Emily PrentissОценок пока нет
- Calculo VectorialДокумент7 страницCalculo VectorialKevin SotoОценок пока нет
- Tarea 1 - 2SДокумент1 страницаTarea 1 - 2SRocisneRocisneОценок пока нет
- Cómo Iluminar Espacios Oscuros Con Luz NaturalДокумент20 страницCómo Iluminar Espacios Oscuros Con Luz NaturalElitzaveruEryzoОценок пока нет
- Velocidad del sonido por resonancia en columnas de aireДокумент4 страницыVelocidad del sonido por resonancia en columnas de aireDereck Granja OrbeОценок пока нет
- Manual BlenderДокумент113 страницManual Blenderskoriaurbana2728Оценок пока нет
- Catalogo DanfossДокумент14 страницCatalogo DanfossHeller AriasОценок пока нет
- Tarea 1Документ2 страницыTarea 1xavier landiОценок пока нет
- Continentes y Civilizaciones Desaparecidas PDFДокумент161 страницаContinentes y Civilizaciones Desaparecidas PDFLa Portada del Sol0% (1)
- De La Conduccion TacticaДокумент2 страницыDe La Conduccion TacticaEstebanОценок пока нет
- Validación de Un MétodoДокумент7 страницValidación de Un MétodoMarianela BignertОценок пока нет
- Nomenclatura CuanticaДокумент5 страницNomenclatura CuanticaAlejandro Omar Camacho CerezoОценок пока нет
- Demanda Maxima Diversificada Tipo Residencial PDFДокумент5 страницDemanda Maxima Diversificada Tipo Residencial PDFKeiner K55Оценок пока нет
- Epidemiologia Del TrabajoДокумент29 страницEpidemiologia Del TrabajoLuz Mary Montañez SamudioОценок пока нет