Servo control IC RS ZN409
Issued November 1984
RS stock number 304-813
The RS ZN409 is a precision monolithic integrated
circuit designed particularly for pulse-width posi-
tion servo mechanisms used in many types of
control applications. The low number of compo-
nents required with the device, together with its
reduced length and low power consumption, make
this integrated circuit ideal for use in compact
servo applications where space, weight and battery
life are at a premium. The amplifier will operate
over a wide range of repetition rates and pulse
widths and is therefore suitable for the majority of
systems. The RS ZN409 can also be used in motor
speed control circuits.
Absolute maximum ratings
Supply voltage __________________________6.5 Volts
Package dissipation__________________300 Milliwatts
Operating temperature range_________-20C to 65C
Storage temperature range __________-65C to 150C
Features
G Low external component count
G Low quiescent current (7mA typical at 4.8V)
G Excellent voltage and temperature stability
G High output drive capability
G Consistent and repeatable performance
G Precision internal voltage stabilisation
G Time shared error pulse expansion
G Balanced deadband control
G Schmitt trigger input shaping
G Reversing relay output
(dc motor speed control)
Characteristics V
CC
= 5V At 25C ambient temperature unless otherwise stated.
Parameter Min. Typ. Max. Unit Conditions
Input threshold (lower) 1.15 1.25 1.35 V Pin 14
Input threshold (upper) 1.4 1.5 1.6 V Pin 14
Ratio upper/lower threshold 1.1 1.2 1.3 10 to + 65C
Input resistance 20 27 35 k V
in
2V (Pin 14)
Input current 350 500 650 A V
in
2V (Pin 14)
Regulator voltage 2.1 2.2 2.3 V 10 to + 65C, 1.3mA load current
Regulator supply voltage rejection ratio 200 300 V
CC
= 3.5 to 6.5V
RSRR
=
dV
in
dV
out
Monostable linearity for 45 pot rotation 3.5 4.0 % R
p
= 1.5k, R
1
= 12k
Monostable period temperature 0.01 %/C Excluding R
T
, C
T
.
coefficient R
p
= 1.5k, R
1
=12k
(potentiometer slider set
mid-way)
Output Schmitt deadband 1 1.5 3 S C
E
= 0.47F
Minimum output pulse 2.5 3.5 4.5 mS C
E
= 0.47F, R
E
= 180k
Error pulse for drive 70 100 130 S 15 ms repetition rate
C
E
= 0.47F, RE = 180k
Total deadband 3.5 5 6.5 S C
D
= 1000pF
P.N.P. drive 40 55 70 mA T = 25C
35 50 65 mA T = 10C
Output saturation voltage 300 400 mV I
L
= 400mA
Direction bistable output 2 2.8 3.6 mA V
CC
= 5V max.
Supply voltage range 3.5 5 6.5 V
Supply current 4.6 6.7 10 mA Quiescent
Total external current from regulator 1.3 mA V
CC
= 3.5V
Peak voltage V
C EXT
(with respect 0.7 V T = 25C
to 2V regulated voltage) 0.5 V T = 10C
004-204
PIN CONNECTIONS
TOP VIEW
Data Pack J
Dat a Sheet
004-204
2
Circuit operation
Figure 1 System diagram
Component function
Circuit
reference Value
Monostable timing components R
T
100k
C
T
0.1F
Potentiometer and timing reference
components R
p
2k
R
1
6.2k
Pulse expansion C
E
0.47F
R
E
180k
Deadband C
D
2200pF
Dynamic feedback R
F
300k
R
B
300k
R
2
1.2k
Input coupling C
C
2.2F
Motor decoupling C
2
0.1F
C
3
0.1F
R.F. decoupling (see text) C
1
0.1F
Drive transistors T
1
, T
2
BC461
Input circuit
The RS ZN409 operates with positive going input
pulses which can be coupled either directly or via a
capacitor to pin 14. the advantage of ac coupling
is that should a fault occur which causes the input
signal to become a continuous positive level, the
servo will remain in its last quiescent position,
whereas with direct coupling the servo output arm
will rotate continuously. A nominal 27k on-chip
resistor is shunted across the input to provide dc
restoration of the input signal when ac coupling is used.
The active input circuit is a Schmitt trigger
which allows the servo to operate consistently with
slow input edges and supplies the fast edge required
by the trigger monostable independent of input edge
speed.
Figure 3
The system diagram in Fig. 1 illustrates the internal
structure of the RSZN409 servo control IC
In the standard servo application the displacement
of a potentiometer control varies the pulse width of
a timing circuit. The signal produced provides the
control input for the servo IC The servo shown in
Fig. 2 consists of the RS ZN409 integrated circuit,
several external components, a power amplifier
consisting of two external PNP transistors and two
on-chip NPN transistors which form a bridge circuit
to drive the dc motor. The motor drives a reduc-
tion gear box which has a potentiometer attached
to the output shaft. The RS precision dc servo
system components are ideally suited for this ap-
plication and the 6V motor should be used. This
potentiometer in association with R
1
and the timing
components C
T
and R
T
controls the pulse width of
the timing monostable. The input pulse is com-
pared with the monostable pulse in a comparison
circuit and one output is used to enable the correct
phase of an on-chip power amplifier. The other
output from the pulse comparison circuit drives the
pulse expansion circuit (C
E
, R
E
) via the deadband
circuit (C
D
). Thus any difference between the input and
monostable pulses is expanded and used to
drive the motor in such a direction as to reduce this
difference so that the servo takes up a position
which corresponds to the position of the control
potentiometer.
Figure 2 Servo system using theRS ZN409
Input circuit Input characteristics
004-204
3
The input circuit and its V/1 characteristic are
shown above. D
1
and D
1
are the parasitic substrate
and isolation diodes associated with the input
resistors. It is advisable that the pulse input ampli-
tude should not fall below 0V nor exceed the
supply voltage Vcc in order to prevent these diodes
from conducting, although a small amount of con-
duction will not cause the circuit to malfunction.
When ac coupling is used the value of C
C
should
be chosen to give a pulse droop not exceeding 0.3
volts.
Assuming that the input signal swings between 0V
and V
CC
and taking the input chord resistance R
IN
of
13k the droop for a pulse of duration msec will
be:
V
d
=
V
CC
t
p
volts
t
p
(msec)
C
C
. R
IN
C
C
(F)
R
IN
(k)
For a nominal pulse width of 1.5 msec and V
d
equal
to 0.3 volts the required minimum value of C
C
can
be found to be 1.85F and a nominal value of 2.2F
is chosen. (Nearest preferred value).
4.8 1.5
C
C
=
0.3 13
= 1.85F
If it is required to operate the servo with reduced
input pulse amplitude the input pulse should ex-
ceed the upper Schmitt threshold voltage of 1.5
volts by a reasonable margin and a minimum input
pulse amplitude of 2.4 volts is recommended.
Deadband circuit
The function of the deadband circuit is to provide a
small range of output shaft positions about the
quiescent position where the difference pulse does
not drive the motor. This is necessary to eliminate
hunting around the quiescent position caused by
servo inertia and overshoot. The minimum dead-
band required is also a function of the pulse expan-
sion characteristics and dynamic feedback compo-
nent values.
When the difference pulse is applied T
1
turns off
and the base of T
2
rises on an exponential wave-
form with a time constant of 4.7 k C
D
. If the
difference pulse is small the potential reached on
the base of T
2
is insufficient to turn T
2
on and no
output results.
The pulse expansion circuit has a built in deadband
of 1.5 sec with C
E
= 0.47 F and this must be
added to the deadband caused by C
D
to obtain the
total T
d
.
T
d
= 1.5 + t
d
sec
and t
d
= 3.3C
D
sec(C
D
in nF)
(Taking V
1
= 1.5 volts and V
be
= 0.75 volts)
Thus with C
D
equal to 2200pF(2n2)
t
d
= 7.26sec and T
d
= 8.76sec.
The mechanical deadband d depends on the
chosen sensitivity S
1
of the servo and in a typical
application at 500sec input pulse variation
causes 50 rotation, ie. S
1
= 10sec per degree.
Thus d = 2.T
d
degrees (T
d
in sec. S
1
in sec per
S
1
degree).
Thus a value for T
d
of 8.76sec provides a mechan-
ical deadband d of 1.8.
And generally:
3 + 6.6 C
D
d = degrees
S
1
Pulse expansion
Figure 4 Input waveforms
Figure 5 Deadband circuit and waveforms
Figure 6
Pulse expansion circuit and characteristics
{
C
D
in nF.
S
1
in sec per
degree.
004-204
4
A schematic of the pulse expansion circuit is shown
in Fig. 6. In the quiescent state with no drive the
Schmitt trigger input is biased via R
E
and takes up a
level just above the lower threshold V
L
.
A drive pulse causes a current I
E
to be switched on
for the duration of the pulse and this discharges C
E
linearly with time. Thus, at the end of the pulse the
voltage on C
E
depends on the duration of the pulse.
If the pulse is narrow and just causes the potential
on C
E
to fall to V
L
the Schmitt trigger will switch to
the upper threshold V
H
and at the end of the drive
pulse C
E
will start to charge to V
H
with a time
constant C
E
R
E
. When the potential on C
E
reaches
V
H
the Schmitt will switch to V
L
and C
E
will dis-
charge to the quiescent level. The output drive is
taken from the Schmitt output.
(shown dotted in Fig. 6) and if this is excessive it
can lead to the servo exhibiting an underdamped
characteristic causing jittering or hunting. Thus for
full pulse expansion the voltage on C
E
should
discharge from its quiescent value of 1.5V to 0.75
volts. Thus with I
E
= 3mA for the current source:
1.5 - 0.75
I
E
=
t
e
C
E
C
E
= 4.t
e
F(t
e
in msec)
For t
e
= 0.1 msec, a value of 0.47F was chosen for
C
E
.
If t
p
is the maximum motor drive pulse length
required, ie. equal to the input pulse repetition
period for full pulse expansion, and the mean value
of the potential on C
E
is taken as 1.2 volts, then:
(t
p
- t
min
)
dv = (V
CC
- 1.2)
C
E
R
E
And for the discharge period t
e
:
I
E
t
e
dv =
C
E
R
E
= (t
p
- t
min
) (V
CC
- 1.2)
I
E
t
e
For nominal values of V
CC
= 4.8V and I
E
= 3mA
(t
p
- t
min
) k
R
E
= 1.2
t
e
and for t
p
= 20msec, t
min
= 3.5msec, t
e
=0.1msec,
R
E
= 180k. (Nearest preferred value).
Monostable timing
dc motors need a certain amount of drive to
overcome static friction and the minimum output
pulse obtained from this form of pulse expansion
characteristic is chosen to ensure that the motor
will rotate when driven.
The value of t
min
is determined by the Schmitt
trigger hysteresis and the exponential waveform
on C
E
because V
H
is small the following linear
relationship is sufficiently accurate.
(V
CC
- V
L
)
V
H
= t
min
C
E
R
E
For nominal operation V
CC
= 4.8V; V
L
= 1.5V; V
H
=
0.12V and:
C
E
R
E
C
E
in F
t
min
msec
30
R
E
in k
and for C
E
= 0.47F and R
E
= 180k, t
min
=
3.5msec.
It can be seen from the simple equation that t
min
is
dependent on V
CC
, and t
min
will increase with
reducing V
CC
. This variation is put to good use to
maintain the initial motor drive, V
CC
t
min
reason-
ably constant over the operating voltage range of
3.5 to 6.5 volts.
When the pulse expansion drive is increased above
the minimum value the output pulse increases
from t
min
almost linearly until full pulse expansion
is reached, ie. when the ouput pulse width equals
the input pulse repetition rate. The pulse expansion
will be almost linear provided that the current
source I
E
does not saturate, ie. provided that C
E
is
not discharged to almost zero volts. Ideally the
current source should saturate when full motor
drive is obtained but due to component tolerances
it is usual to allow some margin to ensure that full
motor drive can be obtained. If a margin is allowed, an
extended pulse expansion characteristic results
Figure 7 Pulse expansion timing diagram
{
Figure 8 Pulse expansion waveform
Figure 9
Monostable timing circuit and waveform
The leading edge of the input waveform triggers
the timing monostable by opening switch S1. CT
then charges until the differential amplifier detects
that the timing waveform potential has fallen to Vp,
the potential on the potentiometer wiper and
switch S1 is closed to terminate the timing pulse. Thus
the monostable period is determined by the
setting of the potentiometer wiper. In the standard
004-204
5
application the servo centre position pulse width is
1.5 msec with a range of 50 rotation at 10 sec
per degree. Thus the 2.0 msec maximum monost-
able period t
mono
(max) corresponds to a potentio-
meter setting of 200 (for a linear relationship) and
since the potentiometer has a total rotation of
approximately 270 and the maximum allowable
swing on pin 3 is specified as 0.5 volt, the value of
C
T
R
T
can be calculated as follows:
0.5 2
t
mono (MAX)
C
T
R
T
C
T
R
T
= 4t
mono (max)
Thus if t
mono (max)
= 2 msec, C
T
R
T
= 8msec.
The optimum value of R
T
is 100k due to the
design of the on-chip monostable circuit giving C
T
= 0.1F (nearest preferred value).
R
T
= 100k C
T
= 0.1F
The value of R
1
can now be calculated from the
actual voltage swing with a potentiometer setting
of p = 200 and max = 270.
V
m
= 2.0. t
mono(max)
C
T
R
T
since C
T
= 0.1F (nearest preferred value) was
chosen with R
T
= 100k, V
m
= 0.4V and hence: R
1
= 3.1 R
p
. If R
p
= 2kthen R
1
= 6.2k.
Dynamic feedback
Without dynamic feedback in the standard applica-
tion the inertia of the motor and gearbox causes
the servo output shaft to overshoot the set position
which results in the servo 'hunting'. If the dead-
band was widened to stop this effect an unaccept-
ably large deadband would result and the servo
would still be underdamped. The dynamic feed-
back circuit utilises the motor back emf (which is
proportional to motor speed) and feeds back a
proportion of this signal to the wiper of the poten-
tiometer. The phase of the feedback signal is
chosen to modify the potential on the wiper so that
the monostable period is dynamically varied to
reduce the motor drive as the servo output shaft
approaches the set position and the values of the
feedback resistors are chosen to achieve optimum
setting characteristics.
The value for R
F
and R
B
of 330k will suit the
normal type of servo mechanism, however if the
servo is fairly fast this can be decreased to 300k
to minimise any tendency to overshoot. Where the
servo is slow R
F
and R
B
can be increased to 360k
or 390k.
RF Decoupling
C
1
(typical value 0.1F) is only necessary where
strong RF fields may affect the operation of the circuit.
Transistors T1 and T2
The external PNP transistors are usually selected
for a low V
CE
(sat) to obtain maximum output drive.
The recommended type is BC461.
Motor speed control
Introduction
In the motor speed control application the
Figure 11
Proportional motor speed control circuit
Figure 10
Potentiometer set at 200C
Equivalent circuit
Thus from the equivalent circuit:
Vm
=
(V
CC
- V
m
)
200 70
270
R
p
R
1
+
270
R
p
where V
m
is calculated from the actual values of C
T
and R
T
chosen using the relationship:
004-204
RS ZN409 is used as a linear pulse width amplifier.
The dc motor is driven via a power amplifier with
a train of pulses whose mark/space ratio can vary
between zero and one to control the motor speed
from zero to maximum. The device operates with
fixed timing components and a fixed resistor re-
places the position feedback potentiometer. The
nominal monostable period represents zero motor
speed and input pulses less than or greater than
nominal drive the motor in the forward and reverse
direction respectively. The motor direction is usual-
ly controlled by a relay operated from pin 4, the
direction output. Pulse expansion components C
E
and R
E
are chosen to obtain the required relation
between control potentiometer and motor speed
and it is usual to operate with a much larger
deadband than that used in the servo application.
The outputs from pins 9 and 5 of the RS ZN409
integrated circuit are combined using two ZTX500
PNP transistors to provide a pulsed output whose
mark/space ratio varies from 0 to 1 depending on
the deflection of the control potentiometer.
This signal is then used to drive the motor via the
power amplifier.
The RS ZN409 has additional circuitry which per-
forms the motor reversing function by taking the
output from the direction bistable and provides
either zero current or approximately 3mA sink
current at pin 4, depending on the state of the
direction bistable. This current is amplified and
used to drive the relay coil (100mA) via the 2N3053
transistor thus controlling the motor direction via
the relay changeover contacts.
It is usual to have a relatively wide deadband and
C
D
= 22nF provides a deadband of about 14% (7
degrees).
A 1k potentiometer (R
p
) can be used to set up the
zero output condition with the control pot in its
central position.
Pulse width generator
A pulse width generator circuit is shown in Figure
12 suitable for driving the RS ZN409 in servo or
motor speed applications.
the frame rate is generated by the first timer and
the frequency is adjusted by VR1 so that the time
between pulses is 18mS. VR2 is then used to
control the ouput pulse width over the range
1-2mS. VR3 is set so that the midpoint of VR2
corresponds to an output pulse of 1.5mS.
VR4 can be included should an output amplitude
control be required.
Figure 12 Pulse width generator
RSComponents Ltd. PO Box 99, Corby, Northants, NN17 9RS
An Electrocomponents Company
Telephone: 01536 201234
RS Components Ltd. 1995
The information provided in RS data sheets is believed to be accurate and reliable; however, RS Components Ltd. assumes no responsibility for inaccuracies or
omissions, or for the use of this information, and all use of such information shall be entirely at the users own risk.
No responsibility is assumed by RSComponents Ltd. for any infringements of patents or other rights of third parties which may result from its use.
Specifications shown in RSComponents Ltd. data sheets is subject to change without notice.
Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- ICL8038 Linear Sweep Function Generator CCTДокумент2 страницыICL8038 Linear Sweep Function Generator CCTian_new100% (1)
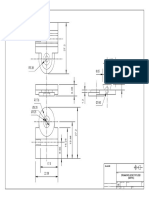
- 1-4 Scale Topslide 2 (Imperial)Документ1 страница1-4 Scale Topslide 2 (Imperial)ian_newОценок пока нет
- Drummond Flat Bed 1-4 Scale Cross Slide 1 (Imperial)Документ1 страницаDrummond Flat Bed 1-4 Scale Cross Slide 1 (Imperial)ian_newОценок пока нет
- Drummond 1-4 Scale Saddle 1 (Imperial)Документ1 страницаDrummond 1-4 Scale Saddle 1 (Imperial)ian_newОценок пока нет
- Plotting B-H Curves - in - 2Документ14 страницPlotting B-H Curves - in - 2ian_new100% (2)
- 1-4 Scale Topslide 1 (Imperial)Документ1 страница1-4 Scale Topslide 1 (Imperial)ian_newОценок пока нет
- Engineering Vol 56 1893-12-29Документ31 страницаEngineering Vol 56 1893-12-29ian_newОценок пока нет
- 1-4 Scale Cross Slide 1 (MetricДокумент1 страница1-4 Scale Cross Slide 1 (Metrician_newОценок пока нет
- ICL8038 - An-013 Everything You Wanted To Know About The ICL8038Документ4 страницыICL8038 - An-013 Everything You Wanted To Know About The ICL8038ian_newОценок пока нет
- 1-4 Scale Topslide 1 (Metric)Документ1 страница1-4 Scale Topslide 1 (Metric)ian_newОценок пока нет
- 1-4 Scale Topslide 2 (Metric)Документ1 страница1-4 Scale Topslide 2 (Metric)ian_newОценок пока нет
- Engineering Vol 56 1893-10-13Документ33 страницыEngineering Vol 56 1893-10-13ian_newОценок пока нет
- 1-4 Scale Saddle 1 (Metric)Документ1 страница1-4 Scale Saddle 1 (Metric)ian_newОценок пока нет
- Engineering Vol 56 IndexДокумент33 страницыEngineering Vol 56 Indexian_newОценок пока нет
- Engineering Vol 56 1893-11-10Документ35 страницEngineering Vol 56 1893-11-10ian_newОценок пока нет
- Engineering Vol 56 1893-12-15Документ33 страницыEngineering Vol 56 1893-12-15ian_newОценок пока нет
- Engineering Vol 56 1893-12-22Документ29 страницEngineering Vol 56 1893-12-22ian_newОценок пока нет
- Engineering Vol 56 1893-11-24Документ29 страницEngineering Vol 56 1893-11-24ian_newОценок пока нет
- Engineering Vol 56 1893-12-01Документ31 страницаEngineering Vol 56 1893-12-01ian_newОценок пока нет
- Engineering Vol 56 1893-12-08Документ33 страницыEngineering Vol 56 1893-12-08ian_newОценок пока нет
- Engineering Vol 56 1893-11-03Документ33 страницыEngineering Vol 56 1893-11-03ian_newОценок пока нет
- Engineering Vol 56 1893-10-27Документ29 страницEngineering Vol 56 1893-10-27ian_newОценок пока нет
- Engineering Vol 56 1893-10-20Документ29 страницEngineering Vol 56 1893-10-20ian_newОценок пока нет
- Engineering Vol 56 1893-12-15Документ33 страницыEngineering Vol 56 1893-12-15ian_newОценок пока нет
- Engineering Vol 56 1893-11-17Документ35 страницEngineering Vol 56 1893-11-17ian_newОценок пока нет
- Engineering Vol 56 1893-09-29Документ29 страницEngineering Vol 56 1893-09-29ian_newОценок пока нет
- Engineering Vol 56 1893-10-06Документ33 страницыEngineering Vol 56 1893-10-06ian_newОценок пока нет
- Engineering Vol 56 1893-09-22Документ29 страницEngineering Vol 56 1893-09-22ian_newОценок пока нет
- Engineering Vol 56 1893-09-15Документ33 страницыEngineering Vol 56 1893-09-15ian_newОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Trafoindo Catalogue Oil Immersed Transformers PDFДокумент2 страницыTrafoindo Catalogue Oil Immersed Transformers PDFarie611Оценок пока нет
- Pain in TransformerДокумент4 страницыPain in TransformeradauОценок пока нет
- Addressable Loop Modules: Introduction FC410MIMДокумент8 страницAddressable Loop Modules: Introduction FC410MIMLORIUNEAОценок пока нет
- Manual Hioki 3454-11Документ2 страницыManual Hioki 3454-11Mauricio Cárdenas Roa100% (1)
- Mirage b2530g ManualДокумент5 страницMirage b2530g ManualWilliam C. AdamsОценок пока нет
- Electronic Products & Components in PUNEДокумент4 страницыElectronic Products & Components in PUNESenthil Kumar MuraliОценок пока нет
- EETДокумент15 страницEETAzirul SambasОценок пока нет
- A Report On Switchyard Equipment Testing (132Документ11 страницA Report On Switchyard Equipment Testing (132harsh_biharОценок пока нет
- Indracontrol S20 Analog Input Module 8 Inputs: FeaturesДокумент20 страницIndracontrol S20 Analog Input Module 8 Inputs: FeaturesDaniel LimaОценок пока нет
- Leroy Somer AVR R220 en PDFДокумент8 страницLeroy Somer AVR R220 en PDFJORGE ARMANDO CARRASCO TICLLEОценок пока нет
- Datasheet Solis - (100-110) K-5G GBR V2.1 2022 10Документ2 страницыDatasheet Solis - (100-110) K-5G GBR V2.1 2022 10Pawrij SuriyaaroonrojОценок пока нет
- Autostart Control Panels - Analog Control System - Product Training Department - OLYMPIAN PDFДокумент22 страницыAutostart Control Panels - Analog Control System - Product Training Department - OLYMPIAN PDFpevare100% (18)
- Diode Characteristics and ApplicationsДокумент12 страницDiode Characteristics and ApplicationsZuopan YapОценок пока нет
- Olympus CH - Brochure - OKДокумент8 страницOlympus CH - Brochure - OKYasuda ReiОценок пока нет
- Booklet On Domestic WiringДокумент113 страницBooklet On Domestic Wiringpubuduclk93% (42)
- 6 - 7 Lmu 5000Документ4 страницы6 - 7 Lmu 5000Anonymous CuRRTsRОценок пока нет
- Types of Transmission Structures: Fact Sheet Fact SheetДокумент2 страницыTypes of Transmission Structures: Fact Sheet Fact Sheetpinku_thakkarОценок пока нет
- NEON LampДокумент14 страницNEON LampVijay GajjalaОценок пока нет
- bdv65 Bdv65a bdv65b bdv65cДокумент3 страницыbdv65 Bdv65a bdv65b bdv65cMaurice LugusaОценок пока нет
- MXL9000 ManualДокумент2 страницыMXL9000 ManualbhsoulОценок пока нет
- Growatt 18000TL3-HE/20000TL3-HE: Leading - Edge TechnologyДокумент2 страницыGrowatt 18000TL3-HE/20000TL3-HE: Leading - Edge TechnologyTu Nguyen Thi CamОценок пока нет
- CAN Data Link Circuit - Test (RENR5096)Документ3 страницыCAN Data Link Circuit - Test (RENR5096)Josip MiškovićОценок пока нет
- Question Bank: Unit-IДокумент8 страницQuestion Bank: Unit-Iollata kalanoОценок пока нет
- Any Grid - PSW H - EN Manual - 2022 02 21 1Документ58 страницAny Grid - PSW H - EN Manual - 2022 02 21 1mahmoud ElmasryОценок пока нет
- Ficha Tecnica SOL GT PolyДокумент2 страницыFicha Tecnica SOL GT Polylic_palominoОценок пока нет
- RET615 - Brochure - Transformer ProtectionДокумент8 страницRET615 - Brochure - Transformer Protectionfiatraj1Оценок пока нет
- MR-J4 Servo Amplifier Cables and Connectors: For 3.5 KW or SmallerДокумент5 страницMR-J4 Servo Amplifier Cables and Connectors: For 3.5 KW or SmallerJesus PonceОценок пока нет
- MODEL PC-414R Transformer Temperature Indicator: 1. ApplicationДокумент4 страницыMODEL PC-414R Transformer Temperature Indicator: 1. ApplicationMKОценок пока нет
- Ntu Ee2002Документ198 страницNtu Ee2002Aaron Bourne Lee100% (1)
- E18 D80NKДокумент5 страницE18 D80NKIlham AhiiemОценок пока нет