Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Answer Ict08Документ7 страницAnswer Ict08Bawl DuManОценок пока нет
- CS601 Final MCQs PDFДокумент54 страницыCS601 Final MCQs PDFSumaira NazОценок пока нет
- 1+1 Modulator Redundancy Switch - AZ210Документ2 страницы1+1 Modulator Redundancy Switch - AZ210MahdiОценок пока нет
- Question Paper 8051 Microcontroller and ApplicationsДокумент1 страницаQuestion Paper 8051 Microcontroller and Applicationsveeramaniks408Оценок пока нет
- Agreement ProtocolsДокумент17 страницAgreement ProtocolsYash AgrawalОценок пока нет
- Databilities 1.0 CC by-NC-ND 4.0Документ14 страницDatabilities 1.0 CC by-NC-ND 4.0Jane CroftsОценок пока нет
- Hendrix, S. and Eisenberg, M. 2005.Документ6 страницHendrix, S. and Eisenberg, M. 2005.Vita Audina Dwi KartikaОценок пока нет
- SCCM Log File DescriptionДокумент2 страницыSCCM Log File DescriptionjankowskijasОценок пока нет
- h15163 Emc Unity Migration TechnologiesДокумент23 страницыh15163 Emc Unity Migration TechnologiesPavan NavОценок пока нет
- Computer Application in MGTДокумент64 страницыComputer Application in MGTVarun KalseОценок пока нет
- SharePoint Server 2019 Reviewer's GuideДокумент30 страницSharePoint Server 2019 Reviewer's GuidecperezqОценок пока нет
- Leveraging Satellite Communications For 5GДокумент21 страницаLeveraging Satellite Communications For 5GabdelОценок пока нет
- HCL AXON Is Utilities Device Management V1 0 - CompleteДокумент38 страницHCL AXON Is Utilities Device Management V1 0 - CompleteVidya Niwas Mishra100% (2)
- Dubai Electricity and Water Authority (DEWA) User Manual How To Add Dewa Marafeq Smart Services in Cad ApplicationsДокумент65 страницDubai Electricity and Water Authority (DEWA) User Manual How To Add Dewa Marafeq Smart Services in Cad ApplicationsON ROADING CONTRACTING LLCОценок пока нет
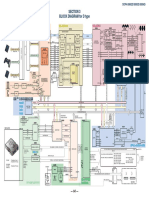
- Section 3 Block Diagram For D Type: Reproduction ProhibitedДокумент37 страницSection 3 Block Diagram For D Type: Reproduction ProhibitedBrahim TelliОценок пока нет
- Ch17 Ownership and PermissionsДокумент19 страницCh17 Ownership and PermissionshasbikizklОценок пока нет
- Dxdiag 64Документ47 страницDxdiag 64BlakeОценок пока нет
- EBI Architecture PDFДокумент1 страницаEBI Architecture PDFPedro VargasОценок пока нет
- XH-80 Series Patient Monitor: Patient Condition in One GlanceДокумент4 страницыXH-80 Series Patient Monitor: Patient Condition in One GlanceTopan AssyОценок пока нет
- Capstone Project ReportДокумент35 страницCapstone Project ReportManikОценок пока нет
- WsCube Tech Online MERN Stack CourseДокумент24 страницыWsCube Tech Online MERN Stack CourseSnehaОценок пока нет
- QAD Procedure - Control of Inspection, Measuring & Test Equipment P1Документ1 страницаQAD Procedure - Control of Inspection, Measuring & Test Equipment P1sumanОценок пока нет
- ICT InstallationДокумент34 страницыICT InstallationDionisia L. PugongОценок пока нет
- Vend POS - Industry-Food-Beverage-RetailДокумент8 страницVend POS - Industry-Food-Beverage-RetailArisAyvatyanОценок пока нет
- PAVIRO Factory Default System: Application NoteДокумент5 страницPAVIRO Factory Default System: Application NoteMajid MehmoodОценок пока нет
- BIOMERIEUX - BacTAlert - 3D - Select LIS Interface Func Rqmts Rev A.00Документ6 страницBIOMERIEUX - BacTAlert - 3D - Select LIS Interface Func Rqmts Rev A.00Jose Perez PerezОценок пока нет
- Konami Digital Entertainment - America 1400 Bridge Parkway, Redwood City, CA 94065Документ24 страницыKonami Digital Entertainment - America 1400 Bridge Parkway, Redwood City, CA 94065c4c4Оценок пока нет
- User Guide PocketBook 614 ENДокумент64 страницыUser Guide PocketBook 614 ENHuriencuОценок пока нет
- The Work Breakdown Structure - How Lack of A Good One Already Sets Your Project Up For FailureДокумент5 страницThe Work Breakdown Structure - How Lack of A Good One Already Sets Your Project Up For Failureed_kozak_2Оценок пока нет
- PSC Lecturer in Computer Science Solved Question Paper 2015Документ12 страницPSC Lecturer in Computer Science Solved Question Paper 2015anishsukumar000gmailcomОценок пока нет