Вам также может понравиться
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108От EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Рейтинг: 4.5 из 5 звезд4.5/5 (8)
- El Controlador PIDДокумент20 страницEl Controlador PIDOmar ManobandaОценок пока нет
- Control y verificación de productos fabricados. FMEE0108От EverandControl y verificación de productos fabricados. FMEE0108Оценок пока нет
- Control Onoff PidДокумент40 страницControl Onoff PidJose Francisco CamachoОценок пока нет
- El Controlador PIDДокумент18 страницEl Controlador PIDivanrs84Оценок пока нет
- UF0466 - Testeo y verificación de equipos y periféricos microinformáticosОт EverandUF0466 - Testeo y verificación de equipos y periféricos microinformáticosОценок пока нет
- MM Paa Regulacion PidДокумент22 страницыMM Paa Regulacion PidRubén Pérez GarcíaОценок пока нет
- Simulación de sistemas discretos: Un enfoque industrialОт EverandSimulación de sistemas discretos: Un enfoque industrialРейтинг: 4 из 5 звезд4/5 (1)
- Fundamento Teorico de Controladores PIDДокумент26 страницFundamento Teorico de Controladores PIDmetanoia88Оценок пока нет
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311От EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Рейтинг: 4.5 из 5 звезд4.5/5 (2)
- Control Automatico de ProcesosДокумент52 страницыControl Automatico de ProcesosLuis Fernando Gomez SalasОценок пока нет
- Sistema de Control Proporcional Derivativo IntegralДокумент5 страницSistema de Control Proporcional Derivativo Integraljuan dugarteОценок пока нет
- Tecnicas de Control ClasicoДокумент11 страницTecnicas de Control ClasicoYelibeth BoraureОценок пока нет
- 03 Modos de ControlДокумент34 страницы03 Modos de ControlRay ContrerasОценок пока нет
- Controlador PidДокумент45 страницControlador PidDiego VA100% (3)
- Controladores PIDДокумент10 страницControladores PIDrodrigoОценок пока нет
- Controladores PIDДокумент10 страницControladores PIDAlvaroA.DavilaОценок пока нет
- Introducción A Los Controladores PIDДокумент24 страницыIntroducción A Los Controladores PIDVictor ReyesОценок пока нет
- Técnicas de Control ClásicoДокумент63 страницыTécnicas de Control ClásicoPavel Osorio QuintanaОценок пока нет
- Unid4 Sem13Документ40 страницUnid4 Sem13Diego OmarОценок пока нет
- InfoPLC Omron Regulacion PIDДокумент52 страницыInfoPLC Omron Regulacion PIDantlormonОценок пока нет
- ControladoresДокумент191 страницаControladoresGibran DiazОценок пока нет
- Metodos de SintoniaДокумент4 страницыMetodos de SintoniaJenry UniversitarioОценок пока нет
- Control PIDДокумент48 страницControl PIDEduardo Herrera CarrilloОценок пока нет
- Tema 14 ControladoresДокумент26 страницTema 14 ControladoresPABLO PEREZ CASTELLONОценок пока нет
- Saber 2 SistemasДокумент15 страницSaber 2 SistemasEDSON MISAEL RODR�GUEZ GARC�AОценок пока нет
- Práctica 2Документ3 страницыPráctica 2angel muñozОценок пока нет
- Lab - 4Документ34 страницыLab - 4rolfiОценок пока нет
- Sintonización de ControladoresДокумент11 страницSintonización de ControladoresJOSE GUADALUPE URIEL PALACIOS CAMPOSОценок пока нет
- Trabajo Final Sistema de ControlesДокумент31 страницаTrabajo Final Sistema de ControleslissandorОценок пока нет
- Optimizacion Lazos de Control ABB GuíaДокумент98 страницOptimizacion Lazos de Control ABB GuíaEduardo Sandoval100% (2)
- Control PIDДокумент52 страницыControl PIDLuis Alfredo Gomez LlancaleoОценок пока нет
- Acciones de ControlДокумент51 страницаAcciones de ControlIgnacio MarquezОценок пока нет
- Practica 08 - Exploracion de Algoritmos de Controles ( - 007Документ4 страницыPractica 08 - Exploracion de Algoritmos de Controles ( - 007Roy Moya HОценок пока нет
- Esquemas Control OptimizadoДокумент39 страницEsquemas Control OptimizadoDaniloОценок пока нет
- Formacion Especifica Tarea ISE8 2 1Документ35 страницFormacion Especifica Tarea ISE8 2 1Lau BenalcazarОценок пока нет
- Control PIDДокумент7 страницControl PIDCristian Rocha JácomeОценок пока нет
- Laboratorio 5Документ7 страницLaboratorio 5hederОценок пока нет
- Bloque Funcional PidДокумент13 страницBloque Funcional PidJORGE ENRIQUE GUTIERREZ ROLDANОценок пока нет
- Semana 13 - Controladores-EFCДокумент42 страницыSemana 13 - Controladores-EFCMi KelОценок пока нет
- Presentacion Control SystemДокумент25 страницPresentacion Control SystemJose Ignacio Rodriguez NegreteОценок пока нет
- Algoritmo para El Control Del PidДокумент8 страницAlgoritmo para El Control Del Pidmargarito93Оценок пока нет
- Controladores P, PI, PIDДокумент17 страницControladores P, PI, PIDLuis D. Rosario JzОценок пока нет
- Tema 5-CONTROLADORES PIDДокумент52 страницыTema 5-CONTROLADORES PIDBrayan Verduguez AlcalaОценок пока нет
- S13.s1 - Clase 13Документ54 страницыS13.s1 - Clase 13Franz Huatuco GabrielОценок пока нет
- Algoritmo de ControlДокумент46 страницAlgoritmo de Controlankatu05Оценок пока нет
- Practica 5 Sintonía de Los ControladoresДокумент29 страницPractica 5 Sintonía de Los ControladoresJaneth ReyesОценок пока нет
- Métodos y Procedimientos Utilizados en La Industria para La Sintonización de Controladores PIDДокумент10 страницMétodos y Procedimientos Utilizados en La Industria para La Sintonización de Controladores PIDLuis Andres RomeroОценок пока нет
- Circuitos Electrónicos Amplificadores 2020Документ49 страницCircuitos Electrónicos Amplificadores 2020Marilyn V.HОценок пока нет
- Practica PIDДокумент13 страницPractica PIDMartín SilvestreОценок пока нет
- Informe LDRДокумент19 страницInforme LDRJuan Carlos ValenciaОценок пока нет
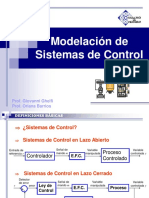
- Modelacion de Sistemas PDFДокумент27 страницModelacion de Sistemas PDFleondavid94Оценок пока нет
- 2 ControladoresДокумент69 страниц2 Controladoresanderson pisconteОценок пока нет
- Semana VII FUNCIONES DE TRANSFERENCIA PARA OPAMPДокумент19 страницSemana VII FUNCIONES DE TRANSFERENCIA PARA OPAMPFredy LaricoОценок пока нет
- Reporte - Practica4 Control PIDДокумент9 страницReporte - Practica4 Control PIDLuis Angel Martinez RamirezОценок пока нет
- Guia de Laboratorio - Sintonia Del Controlador - Procesos y ControlДокумент15 страницGuia de Laboratorio - Sintonia Del Controlador - Procesos y ControlJose Luiz Martel CltsОценок пока нет
- Unidad 4 (Recuperado Automáticamente)Документ12 страницUnidad 4 (Recuperado Automáticamente)Flores KuОценок пока нет
- Control Pid SisoДокумент6 страницControl Pid SisoYesenia CiprianoОценок пока нет
- Muar (Guia)Документ5 страницMuar (Guia)bass1989Оценок пока нет
- Convenio Normas APA PDFДокумент7 страницConvenio Normas APA PDFReinaNeudysОценок пока нет
- CNE Codigo Nacional de ElectricidadДокумент839 страницCNE Codigo Nacional de Electricidadtramirezs85% (13)
- Artur Completo PasantiasДокумент68 страницArtur Completo PasantiasFabian ValarezoОценок пока нет
- Guia Normas APAДокумент0 страницGuia Normas APAJuan MoreiraОценок пока нет
- Anexo 11Документ2 страницыAnexo 11Fabian ValarezoОценок пока нет
- Trbajodelosedificiosterminao 110313140700 Phpapp02.odpДокумент21 страницаTrbajodelosedificiosterminao 110313140700 Phpapp02.odpFabian ValarezoОценок пока нет
- Refriger Ac I OnДокумент9 страницRefriger Ac I OnFabian ValarezoОценок пока нет
- Transform AdoresДокумент107 страницTransform AdoresFabian ValarezoОценок пока нет
- Proyectos Deber 2Документ4 страницыProyectos Deber 2Fabian ValarezoОценок пока нет
- Gas Refrigerante R 22Документ8 страницGas Refrigerante R 22Cristian LopezОценок пока нет
- Proyectos Deber 2Документ4 страницыProyectos Deber 2Fabian ValarezoОценок пока нет
- Transform AdoresДокумент107 страницTransform AdoresFabian ValarezoОценок пока нет
- Centrales de EcuadorДокумент4 страницыCentrales de EcuadorFabian ValarezoОценок пока нет
- OptoacopladoresДокумент1 страницаOptoacopladoresFabian ValarezoОценок пока нет
- Deber de ProyectosДокумент3 страницыDeber de ProyectosFabian ValarezoОценок пока нет
- Circuitos de Control y Fuerza para MotoresДокумент27 страницCircuitos de Control y Fuerza para MotoresFabian ValarezoОценок пока нет
- Himno Al DeporteДокумент3 страницыHimno Al DeporteFabian ValarezoОценок пока нет
- Oficio de AlcantarilladoДокумент1 страницаOficio de AlcantarilladoFabian Valarezo100% (1)
- LOGO! in Details SP 2Документ120 страницLOGO! in Details SP 2Fabian ValarezoОценок пока нет
- Conductores DesnudosДокумент22 страницыConductores DesnudosFabian ValarezoОценок пока нет
- Avance de ElectronicaДокумент3 страницыAvance de ElectronicaFabian ValarezoОценок пока нет
- Manual CADe-SIMUДокумент101 страницаManual CADe-SIMUademir araujo0% (1)
- La RepublicaДокумент5 страницLa RepublicaFabian ValarezoОценок пока нет
- Plan de Cuentas Con ObservacionesДокумент29 страницPlan de Cuentas Con ObservacionesFabian ValarezoОценок пока нет
- Gabriela ContabiliДокумент16 страницGabriela ContabiliFabian ValarezoОценок пока нет
- Matriz Completa Mayo CNHДокумент69 страницMatriz Completa Mayo CNHFabian Valarezo100% (1)
- Sistema de Base de DatossДокумент11 страницSistema de Base de DatossFabian ValarezoОценок пока нет
- Formulario para Formalización de PasantíasДокумент2 страницыFormulario para Formalización de PasantíasFabian ValarezoОценок пока нет
- Actividad Complementaria No. 3 - Introduccion A La Ingenieria CivilДокумент22 страницыActividad Complementaria No. 3 - Introduccion A La Ingenieria CivilFredy PabonОценок пока нет
- Manual de Servicio SC125 (ELITE) EspañolДокумент336 страницManual de Servicio SC125 (ELITE) EspañolRicardo Xlv100% (2)
- Impresoras LaserДокумент9 страницImpresoras LaserCesar Ayasta CasianoОценок пока нет
- Tema 2 - LPP-53-66Документ14 страницTema 2 - LPP-53-66José Burgos MirasОценок пока нет
- Tarea 2Документ3 страницыTarea 2Sergio SalvatierraОценок пока нет
- Hoja de Control Uso de Computadoras - CortoДокумент1 страницаHoja de Control Uso de Computadoras - Cortojavierfvelez0% (1)
- Servicios Telemáticos Relacionados Con InternetДокумент7 страницServicios Telemáticos Relacionados Con InternetJULIETHОценок пока нет
- Andrés RamírezДокумент3 страницыAndrés RamírezJennifer Amador25% (4)
- Tarea 1Документ4 страницыTarea 1davidОценок пока нет
- Archivos SFTP BDEXДокумент7 страницArchivos SFTP BDEXYaneth GalindezОценок пока нет
- Analisis de Algoritmos para Ingenieria D PDFДокумент258 страницAnalisis de Algoritmos para Ingenieria D PDFCASADIEGOS GOMEZ JOHAN SEBASTIANОценок пока нет
- (ESP) DET Official Guide For Test TakersДокумент80 страниц(ESP) DET Official Guide For Test TakersdelfaescuderoОценок пока нет
- Camilo Penagos Orejuela - CV2021Документ1 страницаCamilo Penagos Orejuela - CV2021Andres PereaОценок пока нет
- Ie-3 Inst. Eléctricas - Señales DébilesДокумент1 страницаIe-3 Inst. Eléctricas - Señales DébilesAndrey del Aguila Perea0% (1)
- Starbucks - Service Exploration On BehanceДокумент3 страницыStarbucks - Service Exploration On BehancecarogonherОценок пока нет
- Punto 2 y 3 Entrega 1 de ContabilidadДокумент2 страницыPunto 2 y 3 Entrega 1 de ContabilidadSergio Osorio TrivinoОценок пока нет
- Análisis Estadístico MultivarianteДокумент4 страницыAnálisis Estadístico MultivariantemiguelОценок пока нет
- Formato Pre Solicitud de EmpleoДокумент2 страницыFormato Pre Solicitud de EmpleoSusan GuzmánОценок пока нет
- Mauricio - Aracena - Barraza - s4 - InstrumДокумент4 страницыMauricio - Aracena - Barraza - s4 - InstrumMauricio AracenaОценок пока нет
- Circuitos de Control NeumáticoДокумент5 страницCircuitos de Control NeumáticoJose Jesus Salceda AngelОценок пока нет
- Cuestionario Del AutoДокумент2 страницыCuestionario Del AutoGino Potosi GUAPO FAN DE LINKIN PARK100% (1)
- Articulo GMP+Документ2 страницыArticulo GMP+Mayra Sánchez CabanillasОценок пока нет
- Portafolio Immecol AbiertoДокумент8 страницPortafolio Immecol AbiertoGONZALO AROCAОценок пока нет
- Análisis Como SistemaДокумент4 страницыAnálisis Como SistemaJose Rusbel Bedoya UrreaОценок пока нет
- Francisco Perla Base de DatosДокумент3 страницыFrancisco Perla Base de DatosPerla FranciscoОценок пока нет
- Ensayo Final MatematicasДокумент7 страницEnsayo Final MatematicasAlexander AlfaroОценок пока нет
- DRD - Etiquetas de PreciadoresДокумент6 страницDRD - Etiquetas de PreciadoresFrederik CastilloОценок пока нет
- Gestion de La Produccion II IGE 2009 PDFДокумент11 страницGestion de La Produccion II IGE 2009 PDFmaxОценок пока нет
- Valvulas de Control de PresionДокумент8 страницValvulas de Control de PresionSamit JorgeОценок пока нет
- INFORMEnnDEnnMEJORAnnDEnnPRODUCTOSnnnnYnnPROCESOSnnCONnnLA 45637c516f8d655Документ12 страницINFORMEnnDEnnMEJORAnnDEnnPRODUCTOSnnnnYnnPROCESOSnnCONnnLA 45637c516f8d655Jesu DavidОценок пока нет