Вам также может понравиться
- Control Lab Manual PDFДокумент40 страницControl Lab Manual PDFKareem TarekОценок пока нет
- LAB-1: PID ControlДокумент17 страницLAB-1: PID ControlJulio C. SalinasОценок пока нет
- Proportional Plus Integral Control For Water Level in A TankДокумент30 страницProportional Plus Integral Control For Water Level in A TankDioselle CastilloОценок пока нет
- DEN5200 CONTROL SYSTEMS ANLAYSIS AND DESIGN ReportДокумент15 страницDEN5200 CONTROL SYSTEMS ANLAYSIS AND DESIGN Reportsilvia100% (1)
- Manual Instruction: 1. Usage and Performance CharacteristicsДокумент5 страницManual Instruction: 1. Usage and Performance CharacteristicskolesikОценок пока нет
- Level Control (Our Report)Документ31 страницаLevel Control (Our Report)Brishti Anwar100% (1)
- Lab 6-CSДокумент8 страницLab 6-CSkashafОценок пока нет
- Lab Manual - Control System EngineeringДокумент39 страницLab Manual - Control System Engineeringvineetanishad50% (2)
- Process ControlДокумент21 страницаProcess ControlJamie ForsythОценок пока нет
- Work Shop (23 HLM)Документ23 страницыWork Shop (23 HLM)ferdhian RahmansyahОценок пока нет
- Lab Report CompleteДокумент30 страницLab Report Completefahadfiaz0% (1)
- Case Project - Control System in LabVIEW PDFДокумент15 страницCase Project - Control System in LabVIEW PDFEslemDriraОценок пока нет
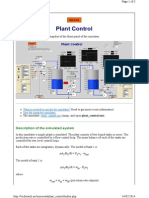
- Techteach - No Simview Plant Control IndexДокумент3 страницыTechteach - No Simview Plant Control IndexDiabloОценок пока нет
- Proportional Control For Water Level in A Tank: Experiment No. 1Документ5 страницProportional Control For Water Level in A Tank: Experiment No. 1Dioselle CastilloОценок пока нет
- Gilian Gilibrator ManualДокумент25 страницGilian Gilibrator ManualEvaavivahОценок пока нет
- ET401 Lab Self-Regulating Single Tank Level Control: Modeling and Tuning Profs Sarnacki, Owen, Olivari, Tefft Fall 2019Документ4 страницыET401 Lab Self-Regulating Single Tank Level Control: Modeling and Tuning Profs Sarnacki, Owen, Olivari, Tefft Fall 2019essameldinОценок пока нет
- Control System NotesДокумент179 страницControl System NotesChandrashekarОценок пока нет
- Group 2 - E06 - EXPERIMENT4Документ4 страницыGroup 2 - E06 - EXPERIMENT4Dioselle CastilloОценок пока нет
- Lab 6-CSДокумент8 страницLab 6-CSAmir IqbalОценок пока нет
- PID Control of Water Level in A Coupled Tank SystemДокумент9 страницPID Control of Water Level in A Coupled Tank SystemEioAsan100% (1)
- Reporter: John Alvin B. SerenioДокумент25 страницReporter: John Alvin B. SerenioPrincess CutabОценок пока нет
- Manual For Continuous Distillation: 1. Week 1Документ21 страницаManual For Continuous Distillation: 1. Week 1Richard ObinnaОценок пока нет
- Oil & Gas Separation Book 2 PDFДокумент47 страницOil & Gas Separation Book 2 PDFMahathir Che Ap100% (4)
- Control SystemДокумент179 страницControl Systemgurudatha26583% (6)
- Electrical Engineering Technology: Cambrian CollegeДокумент12 страницElectrical Engineering Technology: Cambrian CollegeGabrielGrecoОценок пока нет
- Power Electronics: Control : Home Assignment A1: Speed Control With DC MachineДокумент7 страницPower Electronics: Control : Home Assignment A1: Speed Control With DC MachinebmmostefaОценок пока нет
- Exp3 - Air Pressure ControlДокумент8 страницExp3 - Air Pressure ControlDon LawrenceОценок пока нет
- Home Assignment DC Motor Control1Документ7 страницHome Assignment DC Motor Control1jegjegtОценок пока нет
- Closed-Loop System and Closed-Loop Control SystemsДокумент9 страницClosed-Loop System and Closed-Loop Control SystemsfwefОценок пока нет
- Ece IV Control Systems (10es43) Notes1Документ205 страницEce IV Control Systems (10es43) Notes1Nithindev GuttikondaОценок пока нет
- Lab ReportДокумент13 страницLab ReportHemal MenukaОценок пока нет
- Unit-1 NotesДокумент43 страницыUnit-1 NotesMD SHAHRIARMAHMUDОценок пока нет
- Pid EeeeДокумент28 страницPid Eeeecyprian obotaОценок пока нет
- 2.004 Dynamics and Control Ii: Mit OpencoursewareДокумент7 страниц2.004 Dynamics and Control Ii: Mit OpencoursewareVishay RainaОценок пока нет
- Control Theory MaterialДокумент18 страницControl Theory MaterialalwaysharshОценок пока нет
- Control Lab PDFДокумент76 страницControl Lab PDFMohamed BenrahalОценок пока нет
- Open Loop Control System Trainer: Hitech Instruction ManualДокумент4 страницыOpen Loop Control System Trainer: Hitech Instruction ManualnileshsawОценок пока нет
- Control Systems Unit I NotesДокумент55 страницControl Systems Unit I NotesShabbir AliОценок пока нет
- Water LevellingДокумент4 страницыWater Levellingshresth.gupta.ug22Оценок пока нет
- Things To Think About Ch.13 (Process Control A)Документ21 страницаThings To Think About Ch.13 (Process Control A)Salsa NisaОценок пока нет
- Pressure Control ReportДокумент16 страницPressure Control ReportAngel Mah Xin YeeОценок пока нет
- Control SystemДокумент183 страницыControl Systemsantoshgowda8Оценок пока нет
- Liquid Level Control System V2Документ14 страницLiquid Level Control System V2Shisanu SenОценок пока нет
- Lab Manual Control Systems (EEE325) : 2 Edition August 2011Документ7 страницLab Manual Control Systems (EEE325) : 2 Edition August 2011Yasir HussainОценок пока нет
- LAB No. 6 Level Control of Liquid: Name: Abid Kamal Reg No: 3798Документ6 страницLAB No. 6 Level Control of Liquid: Name: Abid Kamal Reg No: 3798Sanjar BeyОценок пока нет
- Control Lab Project ReportДокумент28 страницControl Lab Project ReportDanyal QamarОценок пока нет
- Control SystemsДокумент20 страницControl SystemsRajesh Kumar100% (1)
- Mesb333 Pid ControlДокумент13 страницMesb333 Pid ControlMohd KhairiОценок пока нет
- Industrial RO Control Device - ROC-2313Документ10 страницIndustrial RO Control Device - ROC-2313AmiОценок пока нет
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGОт EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGОценок пока нет
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsОт EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsОценок пока нет
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОт EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОценок пока нет
- Introduction to the simulation of power plants for EBSILON®Professional Version 15От EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15Оценок пока нет
- 3241 Lecture 8Документ45 страниц3241 Lecture 8Jamal AlshaweshОценок пока нет
- Chapter 4 FuselageДокумент29 страницChapter 4 FuselageSaumay ErazoОценок пока нет
- Centre Type State City Address Operating Hours Postal Code Tel#Документ1 страницаCentre Type State City Address Operating Hours Postal Code Tel#Jamal AlshaweshОценок пока нет
- 3241 Lecture 8Документ45 страниц3241 Lecture 8Jamal AlshaweshОценок пока нет
- Yaw Damper Installation GuideДокумент12 страницYaw Damper Installation GuideJamal AlshaweshОценок пока нет
- 18.336 Numerical Methods For Partial Differential Equations Fundamental ConceptsДокумент3 страницы18.336 Numerical Methods For Partial Differential Equations Fundamental ConceptsJamal AlshaweshОценок пока нет
- MIT18 336S09 Lec2Документ4 страницыMIT18 336S09 Lec2Jamal AlshaweshОценок пока нет
- Finite Difference (FD) Approximation: Image by Mit OpencoursewareДокумент7 страницFinite Difference (FD) Approximation: Image by Mit OpencoursewareJamal AlshaweshОценок пока нет
- 3241 Lecture 8Документ45 страниц3241 Lecture 8Jamal AlshaweshОценок пока нет
- MScKabbabe2011 PDFДокумент176 страницMScKabbabe2011 PDFJamal AlshaweshОценок пока нет
- Solid Rocket Enabling Technologies and Milestones in The United StatesДокумент29 страницSolid Rocket Enabling Technologies and Milestones in The United StatesJamal Alshawesh100% (1)
- Autopilot PidДокумент108 страницAutopilot PidmacitusОценок пока нет
- UAV Sim PDFДокумент9 страницUAV Sim PDFJamal AlshaweshОценок пока нет
- Shinmai Maou No Keiyakusha - Volume 11Документ435 страницShinmai Maou No Keiyakusha - Volume 11Bablu Dexter100% (1)
- Gin Act DBQДокумент3 страницыGin Act DBQMichael Liu50% (2)
- 3 5 1 SMДокумент17 страниц3 5 1 SMavsecОценок пока нет
- TOPIC-08-Religion and Society:: Sociological Theories of ReligionДокумент14 страницTOPIC-08-Religion and Society:: Sociological Theories of Religionrishabkumarmp3Оценок пока нет
- A1 ArtsДокумент4 страницыA1 ArtsJennifer AdvientoОценок пока нет
- BONEFELD, Werner (Org.) Open MarxismДокумент191 страницаBONEFELD, Werner (Org.) Open MarxismDiogo CarvalhoОценок пока нет
- Synopsis of The Case StudyДокумент7 страницSynopsis of The Case Studyanna munawwarahОценок пока нет
- Social, Ethical & Economic Aspects of AdvertisingДокумент14 страницSocial, Ethical & Economic Aspects of AdvertisingAdityaОценок пока нет
- Here Is The Question Card: Immigration Has A Major Impact On The Society. What Are The Main Reasons of Immigration? To What Consequences Can It Lead?Документ8 страницHere Is The Question Card: Immigration Has A Major Impact On The Society. What Are The Main Reasons of Immigration? To What Consequences Can It Lead?SJKОценок пока нет
- Cosmic CalendarДокумент11 страницCosmic CalendarRishab SharmaОценок пока нет
- Holle Lesson PlanningДокумент17 страницHolle Lesson PlanningFlavia Uliana LimaОценок пока нет
- Doctoral Comprehensive Examinations in Education Model QuestionsДокумент17 страницDoctoral Comprehensive Examinations in Education Model QuestionsNFPressОценок пока нет
- Transcendental Aesthetic and LogicДокумент4 страницыTranscendental Aesthetic and LogicMacner JobeОценок пока нет
- Summary and ParaphraseДокумент2 страницыSummary and ParaphraseRaja KumarОценок пока нет
- WcseeceДокумент6 страницWcseeceAbdullah Al SakibОценок пока нет
- Puritans, Part IДокумент89 страницPuritans, Part Inecca0070% (1)
- The Special Report BibleДокумент293 страницыThe Special Report BibleAnthony SmithОценок пока нет
- Practice For Knowledge AcquisitionДокумент9 страницPractice For Knowledge AcquisitionselvyncmaОценок пока нет
- Robust Control (Example)Документ41 страницаRobust Control (Example)irmuhidinОценок пока нет
- Math Grade 1 TG Q1 and Q2Документ169 страницMath Grade 1 TG Q1 and Q2Sheryl Balualua Mape-SalvatierraОценок пока нет
- Communicating With EngineersДокумент3 страницыCommunicating With EngineersRic FeatherstoneОценок пока нет
- What Is A ParadigmДокумент2 страницыWhat Is A ParadigmCristian AsmazaОценок пока нет
- DS L4 DataДокумент16 страницDS L4 DataSohaib Ahmed KhanОценок пока нет
- Intro To Law - Atty. Pura Ferrer-CallejaДокумент6 страницIntro To Law - Atty. Pura Ferrer-CallejaJerome BernabeОценок пока нет
- 52 56Документ50 страниц52 56Rahul PanwarОценок пока нет
- The Blue Book of Meditations 1989 Reprinted in 2009 - 5.5 X 8.5Документ164 страницыThe Blue Book of Meditations 1989 Reprinted in 2009 - 5.5 X 8.5Steve mindfulОценок пока нет
- Perspective 1& 2Документ39 страницPerspective 1& 2hiralalnhpcОценок пока нет
- Bac LessonsДокумент79 страницBac LessonsBashir Peace100% (2)
- Reading and Use of EnglishДокумент12 страницReading and Use of EnglishSoraya de la RosaОценок пока нет
- Futurizam Po Norbertu Lintonu (Pp. 97-105)Документ5 страницFuturizam Po Norbertu Lintonu (Pp. 97-105)Kraftfeld100% (1)