Вам также может понравиться
- 1 PDFДокумент6 страниц1 PDFisraaahmed12Оценок пока нет
- 1 PDFДокумент6 страниц1 PDFisraaahmed12Оценок пока нет
- Investigation of Stresses in Ring Stiffened Circular CylinderДокумент5 страницInvestigation of Stresses in Ring Stiffened Circular Cylinderisraaahmed12Оценок пока нет
- 1 s2.0 S0307904X08000103 Main PDFДокумент7 страниц1 s2.0 S0307904X08000103 Main PDFisraaahmed12Оценок пока нет
- 1 PDFДокумент6 страниц1 PDFisraaahmed12Оценок пока нет
- V14 2 14 J Marcinowski PDFДокумент8 страницV14 2 14 J Marcinowski PDFisraaahmed12Оценок пока нет
- Static Analysis of Circular Cylindrical Shell Under Hydrostatic and Ring ForcesДокумент10 страницStatic Analysis of Circular Cylindrical Shell Under Hydrostatic and Ring ForcestevredeОценок пока нет
- Investigation of Stresses in Ring Stiffened Circular CylinderДокумент5 страницInvestigation of Stresses in Ring Stiffened Circular Cylinderisraaahmed12Оценок пока нет
- V14 2 14 J Marcinowski PDFДокумент8 страницV14 2 14 J Marcinowski PDFisraaahmed12Оценок пока нет
- V14 2 14 J Marcinowski PDFДокумент8 страницV14 2 14 J Marcinowski PDFisraaahmed12Оценок пока нет
- V14 2 14 J Marcinowski PDFДокумент8 страницV14 2 14 J Marcinowski PDFisraaahmed12Оценок пока нет
- V14 2 14 J Marcinowski PDFДокумент8 страницV14 2 14 J Marcinowski PDFisraaahmed12Оценок пока нет
- 1 PDFДокумент6 страниц1 PDFisraaahmed12Оценок пока нет
- V14 2 14 J Marcinowski PDFДокумент8 страницV14 2 14 J Marcinowski PDFisraaahmed12Оценок пока нет
- Extreme SubmarineДокумент20 страницExtreme Submarineisraaahmed12Оценок пока нет
- 53 391 PDFДокумент16 страниц53 391 PDFisraaahmed12Оценок пока нет
- Imperfsensitivity PDFДокумент31 страницаImperfsensitivity PDFisraaahmed12Оценок пока нет
- (Asce) 0733-9402 (1999) 125 2Документ3 страницы(Asce) 0733-9402 (1999) 125 2israaahmed12Оценок пока нет
- 1 PDFДокумент6 страниц1 PDFisraaahmed12Оценок пока нет
- Impact2005 (575 592) PDFДокумент18 страницImpact2005 (575 592) PDFisraaahmed12Оценок пока нет
- 010 15027life1003s 67 75 PDFДокумент9 страниц010 15027life1003s 67 75 PDFisraaahmed12Оценок пока нет
- 010 15027life1003s 67 75 PDFДокумент9 страниц010 15027life1003s 67 75 PDFisraaahmed12Оценок пока нет
- 7 PDFДокумент18 страниц7 PDFisraaahmed12Оценок пока нет
- 7 PDFДокумент18 страниц7 PDFisraaahmed12Оценок пока нет
- 685805Документ9 страниц685805israaahmed12Оценок пока нет
- 53 391 PDFДокумент16 страниц53 391 PDFisraaahmed12Оценок пока нет
- Buckling of Stiffened Thin Walled Cylindrical TanksДокумент6 страницBuckling of Stiffened Thin Walled Cylindrical Tanksvalstav100% (1)
- 685805Документ9 страниц685805israaahmed12Оценок пока нет
- Shell BucklingДокумент17 страницShell Bucklingisraaahmed12Оценок пока нет
- Buckling of Stiffened Thin Walled Cylindrical TanksДокумент6 страницBuckling of Stiffened Thin Walled Cylindrical Tanksvalstav100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- RomanelliSerioliMantegazza 3OFWorkshop PresentationДокумент28 страницRomanelliSerioliMantegazza 3OFWorkshop PresentationWoong KimОценок пока нет
- CE6604 QB PDFДокумент15 страницCE6604 QB PDFEr VenkatОценок пока нет
- Introductory Fracture MechanicsДокумент193 страницыIntroductory Fracture MechanicsSerawit Tadesse100% (3)
- International Moth HydrofoilДокумент20 страницInternational Moth HydrofoilMorgan Rook100% (1)
- Milling Machine OperationДокумент40 страницMilling Machine Operationjsmith3455100% (2)
- Lab - 2 WriteupДокумент8 страницLab - 2 WriteupRuby ShajiОценок пока нет
- A1.2.3 Center of Gravity WorksheetДокумент4 страницыA1.2.3 Center of Gravity WorksheetCraig HowdeshellОценок пока нет
- Apollo Experience Report Guidance and Control Systems Digital Autopilot Design DevelopmentДокумент47 страницApollo Experience Report Guidance and Control Systems Digital Autopilot Design DevelopmentBob AndrepontОценок пока нет
- Full Thrust Star Wars PDFДокумент79 страницFull Thrust Star Wars PDFDoktor Avalanche100% (1)
- ROV Intervention InterfacesДокумент4 страницыROV Intervention InterfacesPhilippe AlmeidaОценок пока нет
- ERJ V2 Operations ManualДокумент81 страницаERJ V2 Operations Manualbblli0% (1)
- TechLog JanFeb08Документ28 страницTechLog JanFeb08Vi DangОценок пока нет
- Anschp 07Документ15 страницAnschp 07Alan Martinez100% (2)
- Sae Ams 2759-11-2014Документ5 страницSae Ams 2759-11-2014reynaldoUH100% (2)
- Considerations For The Installation of Honeycomb, ScheimanДокумент60 страницConsiderations For The Installation of Honeycomb, ScheimanFrank MartinОценок пока нет
- Sherwin Mat GuideДокумент2 страницыSherwin Mat Guideanon_94218906Оценок пока нет
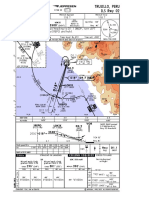
- Trujillo Ils Rwy 02Документ1 страницаTrujillo Ils Rwy 02Mateo CardenasОценок пока нет
- Wind Engines and Wind InstallationsДокумент393 страницыWind Engines and Wind InstallationsSelvaraj KuppannanОценок пока нет
- The Development of The Turbojet Engine in Britain and Germany AsДокумент22 страницыThe Development of The Turbojet Engine in Britain and Germany AsTurk SoloОценок пока нет
- KeyДокумент75 страницKeyP Naga Kailash100% (1)
- InterchangesДокумент4 страницыInterchangesJames Llamera ArgenteОценок пока нет
- ORAG Aviation Guidance FINALДокумент44 страницыORAG Aviation Guidance FINALsmr767Оценок пока нет
- UNITED A319-A320 AIDS Aircraft Integrated Data System Alpha & LabelL Parameter Call-Up UtliizationДокумент33 страницыUNITED A319-A320 AIDS Aircraft Integrated Data System Alpha & LabelL Parameter Call-Up UtliizationBELISARIO67% (3)
- Leonardo Da Vinci and The PropellerДокумент27 страницLeonardo Da Vinci and The PropellerMarina0% (1)
- Referencelist 2014-03 ENДокумент18 страницReferencelist 2014-03 ENbalabhaviniОценок пока нет
- Mach 3+ Nasa UsafДокумент162 страницыMach 3+ Nasa UsafjcljcljclОценок пока нет
- Aircraft Maintenance ChecksДокумент21 страницаAircraft Maintenance ChecksRandal Keith Grayson100% (2)
- Interview Questions-Ronak ShahДокумент3 страницыInterview Questions-Ronak Shahapi-277297976Оценок пока нет
- Lecture 01 Understanding FlightДокумент11 страницLecture 01 Understanding FlightVÕ PHAN ĐỨCОценок пока нет