Вам также может понравиться
- Ejemplo Foda Partes InteresadasДокумент14 страницEjemplo Foda Partes InteresadasAmerico Farfan Vargas100% (1)
- Casos Prácticos CostosДокумент43 страницыCasos Prácticos CostosRobinson Quispe MolinaОценок пока нет
- 120 Indi Ges IndДокумент57 страниц120 Indi Ges IndNilton García JuárezОценок пока нет
- Sistemas de InventariosДокумент12 страницSistemas de Inventariosjats_zОценок пока нет
- Balance ScorecardДокумент6 страницBalance ScorecardRafael ÁvilaОценок пока нет
- Introducción A La Programación DinámicaДокумент34 страницыIntroducción A La Programación DinámicaPrograma Ingeniería de SistemasОценок пока нет
- 120 Indi Ges IndДокумент57 страниц120 Indi Ges IndNilton García JuárezОценок пока нет
- Caso HBS YarkoniДокумент5 страницCaso HBS YarkoniAmerico Farfan VargasОценок пока нет
- Manual PromodelДокумент60 страницManual PromodelJoel FierroОценок пока нет
- Ia09414 PDFДокумент5 страницIa09414 PDFAmerico Farfan VargasОценок пока нет
- Ejercicios de Distribuciones Binomiales y PoissionДокумент3 страницыEjercicios de Distribuciones Binomiales y PoissionAmerico Farfan VargasОценок пока нет
- Sem5 PlanosymovimientosДокумент8 страницSem5 PlanosymovimientosAmerico Farfan VargasОценок пока нет
- 2 Método GráficoДокумент16 страниц2 Método Gráficoapi-373675980% (15)
- Diagnostico Del Almacen de Hilados de La Empresa Textil y Su Incremento de La ProductiviadadДокумент25 страницDiagnostico Del Almacen de Hilados de La Empresa Textil y Su Incremento de La ProductiviadadAmerico Farfan VargasОценок пока нет
- 1.7 DensidadДокумент11 страниц1.7 DensidadRoberto Montiel AriasОценок пока нет
- Problemas Resueltos Cap 3 Fisica SerwayДокумент7 страницProblemas Resueltos Cap 3 Fisica SerwayGaston Chau25% (4)
- Gestion de CalidadДокумент60 страницGestion de CalidadAmerico Farfan VargasОценок пока нет
- Sistema de Cola (MMK)Документ4 страницыSistema de Cola (MMK)Daniel Nogales VjugfgОценок пока нет
- Guia1 IndustrialДокумент10 страницGuia1 IndustrialAmerico Farfan VargasОценок пока нет
- SQL 1Документ8 страницSQL 1Americo Farfan VargasОценок пока нет
- Sem4sonoridad Iluminacion 2Документ23 страницыSem4sonoridad Iluminacion 2Americo Farfan VargasОценок пока нет
- Tranpsorte y AsignacionДокумент16 страницTranpsorte y AsignacionKaren MacarioОценок пока нет
- AdminGen 15Документ3 страницыAdminGen 15Americo Farfan VargasОценок пока нет
- Problema de PPL Sensibilidad1Документ10 страницProblema de PPL Sensibilidad1Americo Farfan VargasОценок пока нет
- USB Gestion InventariosДокумент88 страницUSB Gestion Inventariosmsinohui100% (1)
- Planesdemuestreo 111109225712 Phpapp02Документ26 страницPlanesdemuestreo 111109225712 Phpapp02Americo Farfan VargasОценок пока нет
- CONTABILIDAD MANUALДокумент40 страницCONTABILIDAD MANUALCristina Valeria74% (109)
- Ejerciciosistemadecostosporprocesogrupo10 130514183454 Phpapp01 PDFДокумент10 страницEjerciciosistemadecostosporprocesogrupo10 130514183454 Phpapp01 PDFXimena Reyes Lainez0% (1)
- Ingenieria de Metodos DOP, DAPДокумент10 страницIngenieria de Metodos DOP, DAPAdolfo Arturo Caldas RomeroОценок пока нет
- 13 - 7 Capi 6 PDFДокумент22 страницы13 - 7 Capi 6 PDFClaudia Isabel Rivera FontalvoОценок пока нет
- Software EstadísticoДокумент8 страницSoftware EstadísticoAldair RiosОценок пока нет
- Plandeclase 141020113253 Conversion Gate01 PDFДокумент4 страницыPlandeclase 141020113253 Conversion Gate01 PDFArthur RiversОценок пока нет
- CSW (27994) 050411Документ85 страницCSW (27994) 050411ANTONIO7985Оценок пока нет
- Modulo II. Gestion Documental y Sistema SenecaДокумент15 страницModulo II. Gestion Documental y Sistema SenecaPaquiОценок пока нет
- Brief CreativoДокумент7 страницBrief CreativoGladys Quispe100% (1)
- Desarrollo MDM+AMPLIACIÓNДокумент24 страницыDesarrollo MDM+AMPLIACIÓNJavier ManriqueОценок пока нет
- ZelioДокумент27 страницZeliodiego fernando salgado deviaОценок пока нет
- Solicitud de Empleo LlenaДокумент3 страницыSolicitud de Empleo LlenaMaycol LozanoОценок пока нет
- Examen de AWS Certified Cloud Practitioner - PAG5Документ6 страницExamen de AWS Certified Cloud Practitioner - PAG5ALEJANDRO ALZATE ARIASОценок пока нет
- Arquitectura Cloud Computing PROYECTO Trabajo FINALДокумент66 страницArquitectura Cloud Computing PROYECTO Trabajo FINALScanner2008Оценок пока нет
- Guia de Pasos de Configuración Telefonia y Datos PDFДокумент12 страницGuia de Pasos de Configuración Telefonia y Datos PDFBrayan Camilo IbañezОценок пока нет
- Gestión de potencia y control de motores con la ECU FT450Документ8 страницGestión de potencia y control de motores con la ECU FT450Patricio MamaniОценок пока нет
- Redacción para medios digitales examenДокумент5 страницRedacción para medios digitales examenAndrés Bernal CendalesОценок пока нет
- Modelo OSI: Las 7 capas del modelo de referenciaДокумент7 страницModelo OSI: Las 7 capas del modelo de referenciaDavid Paolo Rocha JaureguiОценок пока нет
- DiapositivasMySQL PresentacionДокумент29 страницDiapositivasMySQL PresentacionNinoska Chura LlojllaОценок пока нет
- Manipulacion de Objetos en Power PointДокумент15 страницManipulacion de Objetos en Power Pointkjfsdkj0% (1)
- Matrices en C++. Declaración - Uso y Sintaxis en C++Документ8 страницMatrices en C++. Declaración - Uso y Sintaxis en C++derekОценок пока нет
- s71500 Counting Measuring Function Manual Es-ES Es-ESДокумент207 страницs71500 Counting Measuring Function Manual Es-ES Es-ESCirilo Capriel GavrielОценок пока нет
- Rúbica 03Документ3 страницыRúbica 03Carlos Pumachara CasasОценок пока нет
- Plan de ComunicacionДокумент2 страницыPlan de ComunicacionEdwin Junior Flores SolisОценок пока нет
- Estructura de Una Memoria de TrabajoДокумент92 страницыEstructura de Una Memoria de TrabajoROBERTO AYALAОценок пока нет
- Clase 2 - Creación Del Diagrama de RedesДокумент5 страницClase 2 - Creación Del Diagrama de RedesAndrews Alexander Erazo RondinelОценок пока нет
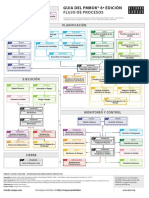
- Ricardo Vargas Simplified Pmbok Flow 6ed Color ES-A3Документ1 страницаRicardo Vargas Simplified Pmbok Flow 6ed Color ES-A3rmendoza85Оценок пока нет
- Formulario Unico Patrimonial #048Документ1 страницаFormulario Unico Patrimonial #048Khriss TOОценок пока нет
- JMeterДокумент4 страницыJMeterEmanuel JaggerОценок пока нет
- Catalogo de Cursos SETI VIRTUALsv - 3Документ61 страницаCatalogo de Cursos SETI VIRTUALsv - 3JHONNATAN GAMBOAОценок пока нет
- CV Villacorta Trinidad Sebastian RaulДокумент3 страницыCV Villacorta Trinidad Sebastian RaulJeff NavarroОценок пока нет
- 08 MTV LeanДокумент23 страницы08 MTV LeanCarlosSanchezОценок пока нет
- Aprende Facebook Ads Desde Cero La Gua Definitiva Paso A Paso para Crear Anuncios en Facebook Que Atrapen Clientes y Leads Spanish Edition by Roberto Gamboa b010mnmxtkДокумент7 страницAprende Facebook Ads Desde Cero La Gua Definitiva Paso A Paso para Crear Anuncios en Facebook Que Atrapen Clientes y Leads Spanish Edition by Roberto Gamboa b010mnmxtkKellyCarranza100% (1)
- Cómo Agregar Un Nuevo Dominio de Correo en ExchangeДокумент6 страницCómo Agregar Un Nuevo Dominio de Correo en ExchangeHersey Castillo LopezОценок пока нет