Вам также может понравиться
- Metaheuristics Applied To Automatic Software Testing: A Brief OverviewДокумент17 страницMetaheuristics Applied To Automatic Software Testing: A Brief OverviewAndres ZuñigaОценок пока нет
- IjserДокумент6 страницIjserPRABHAKARANОценок пока нет
- Ijcet: International Journal of Computer Engineering & Technology (Ijcet)Документ5 страницIjcet: International Journal of Computer Engineering & Technology (Ijcet)IAEME PublicationОценок пока нет
- Software Testing and Quality AssuranceДокумент4 страницыSoftware Testing and Quality AssuranceAnuj SamariyaОценок пока нет
- Theis ProposalДокумент6 страницTheis ProposaliramОценок пока нет
- Zhang 10 DetectingДокумент10 страницZhang 10 DetectingMarcin KlodaОценок пока нет
- De Rezin Ska 2008Документ8 страницDe Rezin Ska 2008Tapti SoniОценок пока нет
- Semi-Proving: An Integrated Method For Program Proving, Testing, and DebuggingДокумент17 страницSemi-Proving: An Integrated Method For Program Proving, Testing, and DebuggingsvksolaiОценок пока нет
- Considering Fault Removal Efficiency in Software Reliability AssessmentДокумент7 страницConsidering Fault Removal Efficiency in Software Reliability AssessmentDebapriya MitraОценок пока нет
- Evaluation and Comparison of Program Slicing Tools: by Tommy HoffnerДокумент67 страницEvaluation and Comparison of Program Slicing Tools: by Tommy HoffnerhewholivedОценок пока нет
- Defect Prediction Using Order StatisticsДокумент11 страницDefect Prediction Using Order StatisticsIAEME PublicationОценок пока нет
- SW Testing and QA Take Home Exam AnswersДокумент50 страницSW Testing and QA Take Home Exam AnswersDahlia GamalОценок пока нет
- Limitations, Applicability: Software Models: andДокумент13 страницLimitations, Applicability: Software Models: andSimmiОценок пока нет
- Fuzzy C Means Method For Cross - Project Software Defect PredictionДокумент10 страницFuzzy C Means Method For Cross - Project Software Defect PredictionPRABHAKARANОценок пока нет
- Exalting Complexity Measures For Software Testing Accompanying Multi AgentsДокумент6 страницExalting Complexity Measures For Software Testing Accompanying Multi AgentsInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Chapter 7Документ22 страницыChapter 7schawingaОценок пока нет
- T R N D S M: HE Emoval of Umerical Rift From Cientific OdelsДокумент11 страницT R N D S M: HE Emoval of Umerical Rift From Cientific OdelsijseaОценок пока нет
- Publication 2 (Final)Документ7 страницPublication 2 (Final)Ranjana DalwaniОценок пока нет
- (IJCST-V3I1P32) :al Mehedi Hasan, Sheena SinghДокумент4 страницы(IJCST-V3I1P32) :al Mehedi Hasan, Sheena SinghEighthSenseGroupОценок пока нет
- A Review of Software Fault Detection and Correction Process, Models and TechniquesДокумент8 страницA Review of Software Fault Detection and Correction Process, Models and TechniquesDr Muhamma Imran BabarОценок пока нет
- Softtest: A Framework For Software Testing of Java ProgramsДокумент5 страницSofttest: A Framework For Software Testing of Java ProgramsWulan DamayantiОценок пока нет
- Adr Set09FinalДокумент14 страницAdr Set09FinalTapti SoniОценок пока нет
- Mutation Operators For Spreadsheets: Robin Abraham and Martin Erwig, Member, IEEEДокумент17 страницMutation Operators For Spreadsheets: Robin Abraham and Martin Erwig, Member, IEEEkiterotОценок пока нет
- A Framework For The Engineering of Reliable Distributed SystemsДокумент8 страницA Framework For The Engineering of Reliable Distributed Systemssurendiran123Оценок пока нет
- Department of Computer Science and Engineering: Subject Name: Subject Code: CS E71Документ63 страницыDepartment of Computer Science and Engineering: Subject Name: Subject Code: CS E71NANDHINI AKОценок пока нет
- 62 1520327334 - 06-03-2018 PDFДокумент7 страниц62 1520327334 - 06-03-2018 PDFRahul SharmaОценок пока нет
- Testing Approach For Automatic Test Case Generation and Optimization Using GAДокумент3 страницыTesting Approach For Automatic Test Case Generation and Optimization Using GAInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- ZIDINДокумент21 страницаZIDINiangarvinsОценок пока нет
- Software Metrics For Fault Prediction Using Machine Learning ApproachesДокумент5 страницSoftware Metrics For Fault Prediction Using Machine Learning ApproachesJerryMathewОценок пока нет
- A Novel Deep Diverse Prototype Forest Algorithm (DDPF) Based Test Case Selection & PrioritizationДокумент15 страницA Novel Deep Diverse Prototype Forest Algorithm (DDPF) Based Test Case Selection & PrioritizationAngel PushpaОценок пока нет
- Software Testing Algorithm Units: American Journal of Engineering Research (AJER)Документ5 страницSoftware Testing Algorithm Units: American Journal of Engineering Research (AJER)AJER JOURNALОценок пока нет
- A Systematic Literature Review On Fault Prediction Performance in Software EngineeringДокумент7 страницA Systematic Literature Review On Fault Prediction Performance in Software EngineeringaflswnfejОценок пока нет
- Software Testing 456Документ31 страницаSoftware Testing 456Chitrangada ChakrabortyОценок пока нет
- 2.1. Software Testing and Analysis-334-348Документ15 страниц2.1. Software Testing and Analysis-334-348Mr NsОценок пока нет
- Tools and Techniques Used For Prioritizing Test Cases in Regression TestingДокумент4 страницыTools and Techniques Used For Prioritizing Test Cases in Regression TestingEditor IJRITCCОценок пока нет
- Impact of Pair Programming On Thoroughness and Fault Detection Effectiveness of Unit Test SuitesДокумент20 страницImpact of Pair Programming On Thoroughness and Fault Detection Effectiveness of Unit Test SuitesSquishyPoopОценок пока нет
- A Debugging Tool For Software EvolutionДокумент9 страницA Debugging Tool For Software EvolutionBabu RamanОценок пока нет
- Active Learning For Automatic Classification of Software BehaviorДокумент11 страницActive Learning For Automatic Classification of Software BehaviorDilshan LahiruОценок пока нет
- 1401 5830 PDFДокумент14 страниц1401 5830 PDFSachin WaingankarОценок пока нет
- A Review On Various Techniques For Regression TestingДокумент6 страницA Review On Various Techniques For Regression Testingsaur089229Оценок пока нет
- TVVДокумент6 страницTVVPritham KoyyodaОценок пока нет
- Ian MicroelectronicsДокумент20 страницIan MicroelectronicsiangarvinsОценок пока нет
- Model Checking For Generation of Test SuitesДокумент6 страницModel Checking For Generation of Test SuitesNorozKhanОценок пока нет
- AspectWrapper Specification-Based Automatic TestinДокумент11 страницAspectWrapper Specification-Based Automatic TestinYasmine MissaouiОценок пока нет
- A Detailed Study of NHPP Software Reliability Models: (Invited Paper)Документ11 страницA Detailed Study of NHPP Software Reliability Models: (Invited Paper)Akshay YadavОценок пока нет
- Data Flow Based Unit Testing On Aspect Oriented Programming: Survey ReportДокумент8 страницData Flow Based Unit Testing On Aspect Oriented Programming: Survey Reportavani_scribdОценок пока нет
- Software TestingДокумент17 страницSoftware TestingvaishuОценок пока нет
- Comprehensive Study On Machine LearningДокумент10 страницComprehensive Study On Machine LearningTahiru Abdul-MoominОценок пока нет
- Ensemble Machine Learning Model For Software Defect PredictionДокумент11 страницEnsemble Machine Learning Model For Software Defect PredictionDada Emmanuel GbengaОценок пока нет
- Assessing Software Reliability Using Modified Genetic Algorithm: Inflection S-Shaped ModelДокумент6 страницAssessing Software Reliability Using Modified Genetic Algorithm: Inflection S-Shaped ModelAnonymous lPvvgiQjRОценок пока нет
- From The Art of Software Testing To Test-As-A-Service in Cloud ComputingДокумент21 страницаFrom The Art of Software Testing To Test-As-A-Service in Cloud ComputingAnonymous rVWvjCRLGОценок пока нет
- Ijcs 2016 0303014 PDFДокумент5 страницIjcs 2016 0303014 PDFeditorinchiefijcsОценок пока нет
- IST BugSeverityPredictionДокумент51 страницаIST BugSeverityPredictionFortHellОценок пока нет
- Arbaminch University Institute of TechnologyДокумент8 страницArbaminch University Institute of Technologydevid mandefroОценок пока нет
- Test Suite QualityДокумент5 страницTest Suite QualityEduardo LunaОценок пока нет
- Implementation of Software Testing Using Any LanguageДокумент14 страницImplementation of Software Testing Using Any LanguageaddssdfaОценок пока нет
- An Empirical Study of Statement Coverage Criteria To Reduce The Test Cases-A ReviewДокумент4 страницыAn Empirical Study of Statement Coverage Criteria To Reduce The Test Cases-A ReviewInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Techniques of Increasing Model Validity and CredibilityДокумент2 страницыTechniques of Increasing Model Validity and CredibilityGideon YegonОценок пока нет
- Tester DictionaryДокумент6 страницTester Dictionaryapi-27601960Оценок пока нет
- An Efficient Model of Detection and Filtering Technique Over Malicious and Spam E-MailsДокумент4 страницыAn Efficient Model of Detection and Filtering Technique Over Malicious and Spam E-MailsseventhsensegroupОценок пока нет
- Comparison of The Effects of Monochloramine and Glutaraldehyde (Biocides) Against Biofilm Microorganisms in Produced WaterДокумент8 страницComparison of The Effects of Monochloramine and Glutaraldehyde (Biocides) Against Biofilm Microorganisms in Produced WaterseventhsensegroupОценок пока нет
- Fabrication of High Speed Indication and Automatic Pneumatic Braking SystemДокумент7 страницFabrication of High Speed Indication and Automatic Pneumatic Braking Systemseventhsensegroup0% (1)
- Optimal Search Results Over Cloud With A Novel Ranking ApproachДокумент5 страницOptimal Search Results Over Cloud With A Novel Ranking ApproachseventhsensegroupОценок пока нет
- Extended Kalman Filter Based State Estimation of Wind TurbineДокумент5 страницExtended Kalman Filter Based State Estimation of Wind TurbineseventhsensegroupОценок пока нет
- Experimental Investigation On Performance, Combustion Characteristics of Diesel Engine by Using Cotton Seed OilДокумент7 страницExperimental Investigation On Performance, Combustion Characteristics of Diesel Engine by Using Cotton Seed OilseventhsensegroupОценок пока нет
- Ijett V5N1P103Документ4 страницыIjett V5N1P103Yosy NanaОценок пока нет
- Design, Development and Performance Evaluation of Solar Dryer With Mirror Booster For Red Chilli (Capsicum Annum)Документ7 страницDesign, Development and Performance Evaluation of Solar Dryer With Mirror Booster For Red Chilli (Capsicum Annum)seventhsensegroupОценок пока нет
- Comparison of The Regression Equations in Different Places Using Total StationДокумент4 страницыComparison of The Regression Equations in Different Places Using Total StationseventhsensegroupОценок пока нет
- A Multi-Level Storage Tank Gauging and Monitoring System Using A Nanosecond PulseДокумент8 страницA Multi-Level Storage Tank Gauging and Monitoring System Using A Nanosecond PulseseventhsensegroupОценок пока нет
- Application of Sparse Matrix Converter For Microturbine-Permanent Magnet Synchronous Generator Output Voltage Quality EnhancementДокумент8 страницApplication of Sparse Matrix Converter For Microturbine-Permanent Magnet Synchronous Generator Output Voltage Quality EnhancementseventhsensegroupОценок пока нет
- Key Drivers For Building Quality in Design PhaseДокумент6 страницKey Drivers For Building Quality in Design PhaseseventhsensegroupОценок пока нет
- Color Constancy For Light SourcesДокумент6 страницColor Constancy For Light SourcesseventhsensegroupОценок пока нет
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationДокумент6 страницImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupОценок пока нет
- Design and Implementation of Height Adjustable Sine (Has) Window-Based Fir Filter For Removing Powerline Noise in ECG SignalДокумент5 страницDesign and Implementation of Height Adjustable Sine (Has) Window-Based Fir Filter For Removing Powerline Noise in ECG SignalseventhsensegroupОценок пока нет
- FPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorДокумент4 страницыFPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorseventhsensegroupОценок пока нет
- The Utilization of Underbalanced Drilling Technology May Minimize Tight Gas Reservoir Formation Damage: A Review StudyДокумент3 страницыThe Utilization of Underbalanced Drilling Technology May Minimize Tight Gas Reservoir Formation Damage: A Review StudyseventhsensegroupОценок пока нет
- An Efficient Expert System For Diabetes by Naïve Bayesian ClassifierДокумент6 страницAn Efficient Expert System For Diabetes by Naïve Bayesian ClassifierseventhsensegroupОценок пока нет
- An Efficient Encrypted Data Searching Over Out Sourced DataДокумент5 страницAn Efficient Encrypted Data Searching Over Out Sourced DataseventhsensegroupОценок пока нет
- An Efficient and Empirical Model of Distributed ClusteringДокумент5 страницAn Efficient and Empirical Model of Distributed ClusteringseventhsensegroupОценок пока нет
- Separation Of, , & Activities in EEG To Measure The Depth of Sleep and Mental StatusДокумент6 страницSeparation Of, , & Activities in EEG To Measure The Depth of Sleep and Mental StatusseventhsensegroupОценок пока нет
- Study On Fly Ash Based Geo-Polymer Concrete Using AdmixturesДокумент4 страницыStudy On Fly Ash Based Geo-Polymer Concrete Using AdmixturesseventhsensegroupОценок пока нет
- Review On Different Types of Router Architecture and Flow ControlДокумент4 страницыReview On Different Types of Router Architecture and Flow ControlseventhsensegroupОценок пока нет
- High Speed Architecture Design of Viterbi Decoder Using Verilog HDLДокумент7 страницHigh Speed Architecture Design of Viterbi Decoder Using Verilog HDLseventhsensegroupОценок пока нет
- Non-Linear Static Analysis of Multi-Storied BuildingДокумент5 страницNon-Linear Static Analysis of Multi-Storied Buildingseventhsensegroup100% (1)
- Free Vibration Characteristics of Edge Cracked Functionally Graded Beams by Using Finite Element MethodДокумент8 страницFree Vibration Characteristics of Edge Cracked Functionally Graded Beams by Using Finite Element MethodseventhsensegroupОценок пока нет
- Ijett V4i10p158Документ6 страницIjett V4i10p158pradeepjoshi007Оценок пока нет
- Performance and Emissions Characteristics of Diesel Engine Fuelled With Rice Bran OilДокумент5 страницPerformance and Emissions Characteristics of Diesel Engine Fuelled With Rice Bran OilseventhsensegroupОценок пока нет
- A Comparative Study of Impulse Noise Reduction in Digital Images For Classical and Fuzzy FiltersДокумент6 страницA Comparative Study of Impulse Noise Reduction in Digital Images For Classical and Fuzzy FiltersseventhsensegroupОценок пока нет
- A Review On Energy Efficient Secure Routing For Data Aggregation in Wireless Sensor NetworksДокумент5 страницA Review On Energy Efficient Secure Routing For Data Aggregation in Wireless Sensor NetworksseventhsensegroupОценок пока нет
- Printed Circuit Board: BOI 2010 Tartu Estonia Day: 1 Task: PCB Language: ENGДокумент1 страницаPrinted Circuit Board: BOI 2010 Tartu Estonia Day: 1 Task: PCB Language: ENGDEVIL ADMINОценок пока нет
- C Pass Addresses and PointersДокумент29 страницC Pass Addresses and PointersaishОценок пока нет
- Intelligent Traffic Management in SDN IJERTV6IS050410Документ5 страницIntelligent Traffic Management in SDN IJERTV6IS050410Engr XsadОценок пока нет
- Stock Price PredictionДокумент25 страницStock Price Predictioniot forum83% (6)
- Step 2 - Configure Fortigate Logging: /etc/filebeat/filebeat - YmlДокумент5 страницStep 2 - Configure Fortigate Logging: /etc/filebeat/filebeat - YmlDung Nguyen HoaiОценок пока нет
- Concentric Cell (GBSS17.1 01)Документ159 страницConcentric Cell (GBSS17.1 01)waelq2003Оценок пока нет
- Tle 9 Ict Las Q2Документ12 страницTle 9 Ict Las Q2marichuОценок пока нет
- Robotic Intro: by Jefferson Rey J. Arroyo, ECEДокумент39 страницRobotic Intro: by Jefferson Rey J. Arroyo, ECELykaShanineGabrielMendozaОценок пока нет
- Lesson 1 - Fundamental of Programming in PythonДокумент20 страницLesson 1 - Fundamental of Programming in PythonDeleon, John Kevin L.Оценок пока нет
- Qualcomm-Qcm-Qcs6490-Product-Brief-Sub-6 GHZ and Support For Wi-Fi 6EДокумент2 страницыQualcomm-Qcm-Qcs6490-Product-Brief-Sub-6 GHZ and Support For Wi-Fi 6ElingОценок пока нет
- Power BiДокумент8 страницPower Bigod of thunder ThorОценок пока нет
- Robert Smith: Computer EngineerДокумент2 страницыRobert Smith: Computer Engineeranon ymousОценок пока нет
- User Manual: 5G AC2600 Wi-Fi RouterДокумент88 страницUser Manual: 5G AC2600 Wi-Fi RouterFra MasterОценок пока нет
- Abstrac Programming Lab-ManualДокумент50 страницAbstrac Programming Lab-ManualRozy VadgamaОценок пока нет
- Fundamental Network Programming: Socket in C#Документ14 страницFundamental Network Programming: Socket in C#Duy Lâm BảoОценок пока нет
- Project Report: BS (CS) - 6 (A) Project Title: Toxic Comment AnalysisДокумент20 страницProject Report: BS (CS) - 6 (A) Project Title: Toxic Comment AnalysisAli AsgharОценок пока нет
- Dip FinalДокумент2 страницыDip FinalAroosa JavedОценок пока нет
- Practical 6Документ19 страницPractical 6Yogyta SinghОценок пока нет
- City Engineering College: Visvesvaraya Technological University Jnana Sangama, Belagavi-590018Документ15 страницCity Engineering College: Visvesvaraya Technological University Jnana Sangama, Belagavi-590018Bal RajОценок пока нет
- Srs GamingДокумент9 страницSrs Gamingsanchit chopraОценок пока нет
- Speedlog 4Документ3 страницыSpeedlog 4mohit mathurОценок пока нет
- R5-Supreme-AIS - Installation-and-IM-settings - WITH NOTESДокумент7 страницR5-Supreme-AIS - Installation-and-IM-settings - WITH NOTESChristian Reyes NicholasОценок пока нет
- Ch.3 Digital Service Unit (DSU) CabinetДокумент14 страницCh.3 Digital Service Unit (DSU) CabinetMohamed ZakimОценок пока нет
- Akmal Shaikh: +968 95218187 ELV Engineer (Projects)Документ3 страницыAkmal Shaikh: +968 95218187 ELV Engineer (Projects)Fawaz ManoorОценок пока нет
- Hospital Network Design Project ReportДокумент8 страницHospital Network Design Project ReportAnirudh SharmaОценок пока нет
- PTK40A Quick Start GuideДокумент16 страницPTK40A Quick Start GuideAFK MasterОценок пока нет
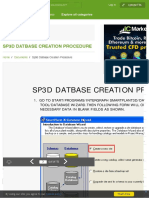
- Sp3d Database Creation ProcedureДокумент3 страницыSp3d Database Creation ProcedureBayuОценок пока нет
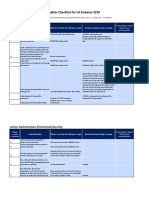
- Auditors ChecklistДокумент9 страницAuditors ChecklistNorah Al-ShamriОценок пока нет
- Mca 303 PDFДокумент396 страницMca 303 PDFRadha IshuОценок пока нет
- Adguard Premium Full Version 7.7.0 GratisДокумент6 страницAdguard Premium Full Version 7.7.0 GratisRamdanОценок пока нет