Вам также может понравиться
- DCA-Diseño Completamente al AzarДокумент28 страницDCA-Diseño Completamente al Azarfitz130576% (21)
- Trabajo Final de Presupuesto 2Документ32 страницыTrabajo Final de Presupuesto 2Dante Belmonth67% (3)
- Filosofia y ComunicaciónДокумент6 страницFilosofia y ComunicaciónricardoОценок пока нет
- Informe Final Pistas Veredas Licapa OkДокумент78 страницInforme Final Pistas Veredas Licapa OkCristian FernandezОценок пока нет
- Nh3 Vs Freon GeaДокумент14 страницNh3 Vs Freon GeaEugenio DurbanОценок пока нет
- Report Ese Man Ascot I Zad AsДокумент4 страницыReport Ese Man Ascot I Zad AsAntonio RuizОценок пока нет
- Minimos CuadradosДокумент25 страницMinimos CuadradosWILLIAM JAVIER LEONARDO CONDEОценок пока нет
- Guia 9 - Monica Julieth Malagon CortesДокумент18 страницGuia 9 - Monica Julieth Malagon Cortesjulieth cortesОценок пока нет
- Eje PedagogicoДокумент6 страницEje PedagogicoBLANQUISSОценок пока нет
- Tema 2 ResumenДокумент12 страницTema 2 ResumenJorge AlvarezОценок пока нет
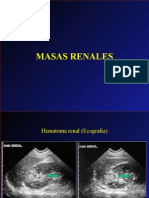
- Masas - Renales - Imagen DiagnósticaДокумент22 страницыMasas - Renales - Imagen DiagnósticaramonОценок пока нет
- Pruebas de Salud FetalДокумент48 страницPruebas de Salud FetalMaria EchavarriaОценок пока нет
- Revaluación en Propiedades de InversiónДокумент4 страницыRevaluación en Propiedades de InversiónLuis Antonio CabaredaОценок пока нет
- Cuadros de Tos en Perros PDFДокумент22 страницыCuadros de Tos en Perros PDFBrend RazoОценок пока нет
- Materiales para ductos de construcciónДокумент2 страницыMateriales para ductos de construcciónMarcos Acosta100% (1)
- PETS 022 Montaje de Escaleras MetalicasДокумент6 страницPETS 022 Montaje de Escaleras MetalicasJennifer She PazОценок пока нет
- Métodos GravimétricosДокумент21 страницаMétodos Gravimétricosdajhan galeanoОценок пока нет
- CRBC-PRD-005 Excavacion - No.clasific.p'.estructurasДокумент8 страницCRBC-PRD-005 Excavacion - No.clasific.p'.estructurasfreddyОценок пока нет
- Puente Ciruelo PrimeraentregaДокумент27 страницPuente Ciruelo PrimeraentregaLeidy Coral YMОценок пока нет
- TemaII Lípidos para BiomoleculasДокумент19 страницTemaII Lípidos para BiomoleculasJavier Yribarren MondejarОценок пока нет
- Cotizacion de Ventanas Puertas MamparaДокумент3 страницыCotizacion de Ventanas Puertas MamparaJordan RuttiОценок пока нет
- Taller de Seguimiento RevisoriaДокумент9 страницTaller de Seguimiento RevisoriaErika SanchezОценок пока нет
- Caso 1 Resumen Liderar La Transformación Dirección EstratégicaДокумент4 страницыCaso 1 Resumen Liderar La Transformación Dirección EstratégicaMelina CampbellОценок пока нет
- wuolah-free-GD PRIMARIA TFGДокумент8 страницwuolah-free-GD PRIMARIA TFGOposiciones Docentes CuencaОценок пока нет
- Leche elaboración productos lácteosДокумент84 страницыLeche elaboración productos lácteosmarioosorioОценок пока нет
- CostosДокумент23 страницыCostosLuca SaccomannoОценок пока нет
- Coronas de AcrilicoДокумент10 страницCoronas de AcrilicoproudatorОценок пока нет
- Res 412 2000Документ9 страницRes 412 2000lisethmcОценок пока нет
- INSTALACIONES ELECTRICAS UNTELS IntroduciccionДокумент62 страницыINSTALACIONES ELECTRICAS UNTELS IntroduciccionRudyJesusCapaIlizarbeОценок пока нет
- S1 - Administración de Operaciones 1Документ20 страницS1 - Administración de Operaciones 1Alberto Cueva AngelesОценок пока нет