Вам также может понравиться
- FeiraДокумент1 страницаFeiraphmferreiraОценок пока нет
- InfoДокумент1 страницаInfoPatrícia Valiati SouzaОценок пока нет
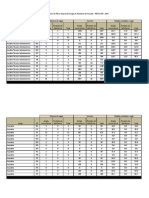
- Relacao Candidato X Vaga - PECFAZ-MF-2013Документ5 страницRelacao Candidato X Vaga - PECFAZ-MF-2013AlexsandrОценок пока нет
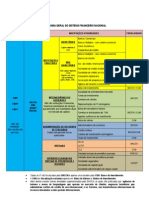
- Panorama Geral Sist Financeiro Nac PDFДокумент1 страницаPanorama Geral Sist Financeiro Nac PDFphmferreiraОценок пока нет
- PimsLeur - ApostilaДокумент29 страницPimsLeur - ApostilaGill100% (1)
- Carlos Barbosa Atos Administrativos Parte 1Документ10 страницCarlos Barbosa Atos Administrativos Parte 1pacabea5161Оценок пока нет
- Resumo Direito AdministrativoДокумент72 страницыResumo Direito AdministrativoAline *Materiais de estudo para concursos*100% (1)
- Questões Cesgranrio Da Lei 8112Документ25 страницQuestões Cesgranrio Da Lei 8112normasuelaОценок пока нет
- Presença DigitalДокумент4 страницыPresença DigitalCedupОценок пока нет
- Sistema de controle para splitõesДокумент18 страницSistema de controle para splitõesWesley AmancioОценок пока нет
- A 04 - Análise de Dados No Power BIДокумент38 страницA 04 - Análise de Dados No Power BIfelipeandradeti100% (1)
- Transmissão de Dados AeronáuticosДокумент60 страницTransmissão de Dados AeronáuticosCaciano Vinicius KrenchinskiОценок пока нет
- 2 EndevorДокумент29 страниц2 EndevorpagbarrosОценок пока нет
- Criando página fakeДокумент2 страницыCriando página fakeHalo KodeinОценок пока нет
- Formação em Linguagens e Tecnologias - Avaliação Módulo 1Документ6 страницFormação em Linguagens e Tecnologias - Avaliação Módulo 1RH Oito Ervas100% (22)
- TabelaДокумент30 страницTabelaHian OliveiraОценок пока нет
- Manual Do Utilizador VT2500Документ68 страницManual Do Utilizador VT2500Heitor Souza0% (1)
- Construindo um Theremin com 4 métodosДокумент11 страницConstruindo um Theremin com 4 métodosDiogo DuranОценок пока нет
- Proposta de venda de máquina de ensaios mecânicosДокумент3 страницыProposta de venda de máquina de ensaios mecânicosMarco A. R. JimenesОценок пока нет
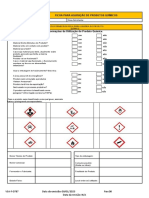
- VSA-F-0787R00 FAPQ - Ficha de Aceitação de Produtos Químicos (V1)Документ2 страницыVSA-F-0787R00 FAPQ - Ficha de Aceitação de Produtos Químicos (V1)Julio IzelОценок пока нет
- Algorimos Python 28 08 2023Документ719 страницAlgorimos Python 28 08 2023JAMILLY VITORIA FERREIRA BARBOSAОценок пока нет
- Ecologia FlorestalДокумент3 страницыEcologia FlorestalJeyОценок пока нет
- Manual-HTL 3510Документ2 страницыManual-HTL 3510Michel GonçalvesОценок пока нет
- Catálogo de Acessórios - WEBДокумент68 страницCatálogo de Acessórios - WEBEuclides Melo JúniorОценок пока нет
- Configurando cliente HTTPS com Eclipse para acessar Web ServiceДокумент17 страницConfigurando cliente HTTPS com Eclipse para acessar Web ServiceSergio SilvaОценок пока нет
- MPP - Trabalho - Título ChatGPTДокумент8 страницMPP - Trabalho - Título ChatGPTNaiane MedeirosОценок пока нет
- Motivações e histórico da transição IPv4 para IPv6Документ9 страницMotivações e histórico da transição IPv4 para IPv6Airton Lopes FilhoОценок пока нет
- Detecção de componentes de rede elétrica por visão computacionalДокумент62 страницыDetecção de componentes de rede elétrica por visão computacionalIsabella LorentzОценок пока нет
- Brazor para LeigosДокумент76 страницBrazor para LeigosSilas SantosОценок пока нет
- NIT-DICLA-26 - 04 - Requisitos Lab - Ensaio Ensaio ProficiênciaДокумент6 страницNIT-DICLA-26 - 04 - Requisitos Lab - Ensaio Ensaio Proficiênciaoigresy100% (1)
- Catalogo Heliar 2019Документ33 страницыCatalogo Heliar 2019fabiobonadiaОценок пока нет
- Usando Programas de Diagnóstico de Hardware - LAERCIO VASCONCELOSДокумент55 страницUsando Programas de Diagnóstico de Hardware - LAERCIO VASCONCELOSRicardo PereiraОценок пока нет
- Leitor de cartão magnético MagPass II ideal para diversas aplicaçõesДокумент2 страницыLeitor de cartão magnético MagPass II ideal para diversas aplicaçõesLeonardo CarvalhoОценок пока нет
- Veneziana fixa grade exaustor 12x12cmДокумент2 страницыVeneziana fixa grade exaustor 12x12cmNestor JuniorОценок пока нет
- LITERACIA DIGITAL - INICIAÇÃOДокумент12 страницLITERACIA DIGITAL - INICIAÇÃOCapitaoLusoОценок пока нет
- MODELO Proposta Orçamento Midias SociaisДокумент11 страницMODELO Proposta Orçamento Midias SociaisCaio Nogueira67% (9)
- Pack 2 Placa LED Circular 6W Corte Ø 105 MMДокумент3 страницыPack 2 Placa LED Circular 6W Corte Ø 105 MMAntonio BrasíliaОценок пока нет
- Programa Nuclear Disciplinas 1-2o Trimestres 2012Документ4 страницыPrograma Nuclear Disciplinas 1-2o Trimestres 2012Fernando PeleiasОценок пока нет