Вам также может понравиться
- Probability & Random Variable Cheat SheetДокумент2 страницыProbability & Random Variable Cheat SheetadkinsblОценок пока нет
- UEP - PPT - Elec. Heating PDFДокумент117 страницUEP - PPT - Elec. Heating PDFANUSHA SINGH V HОценок пока нет
- 308manual 5 03Документ57 страниц308manual 5 03basileiouspyrosОценок пока нет
- Basic Probability TheoryДокумент51 страницаBasic Probability TheoryA Hasib ChowdhuryОценок пока нет
- Formula PQTДокумент13 страницFormula PQTசிவக்குமார் ஈஸ்வரன்Оценок пока нет
- Signal and SystemsДокумент83 страницыSignal and SystemszecelecОценок пока нет
- Probability and Stochastic Processes 3rd Edition Quiz SolutionsДокумент90 страницProbability and Stochastic Processes 3rd Edition Quiz SolutionsEdward Li100% (2)
- Motor Starter NordДокумент36 страницMotor Starter NordEuojrОценок пока нет
- Buck - Boost ConverterДокумент9 страницBuck - Boost Converterhamza abdo mohamoud100% (1)
- FormulaДокумент7 страницFormulaMàddìRèxxShìrshírОценок пока нет
- Solved Question Papers For Gate Mechanical EngineeringДокумент16 страницSolved Question Papers For Gate Mechanical EngineeringAsaduz ZamanОценок пока нет
- Quartus II Introduction-VHDLДокумент38 страницQuartus II Introduction-VHDLMarc FilbàОценок пока нет
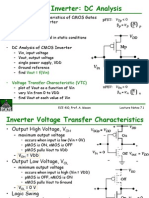
- CMOS Inverter: DC AnalysisДокумент32 страницыCMOS Inverter: DC Analysissreekanthreddy peram50% (2)
- RTD BasicsДокумент5 страницRTD BasicsMourougapragash SubramanianОценок пока нет
- Dynamical Systems: An LTCC CourseДокумент53 страницыDynamical Systems: An LTCC CourseRoy VeseyОценок пока нет
- Medidas Eroelectronic PDFДокумент4 страницыMedidas Eroelectronic PDFJuan Diego CondeОценок пока нет
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОт EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОценок пока нет
- Half-Wave RL Circuit With A Free-Wheeling DiodeДокумент7 страницHalf-Wave RL Circuit With A Free-Wheeling Diodehamza abdo mohamoud100% (2)
- Method of Moments: Topic 13Документ9 страницMethod of Moments: Topic 13Zeeshan AhmedОценок пока нет
- Rectifier and FiltersДокумент36 страницRectifier and FiltersPankaj SinghОценок пока нет
- Characteristics of ThermocoupleДокумент6 страницCharacteristics of ThermocouplekusumgdasОценок пока нет
- Multivariate Random VariablesДокумент29 страницMultivariate Random VariablesEdmond ZОценок пока нет
- Coordination Tables: 1SDC007004D0205Документ98 страницCoordination Tables: 1SDC007004D0205HoangОценок пока нет
- Equal Area Criterion 1.0 Development of Equal Area CriterionДокумент33 страницыEqual Area Criterion 1.0 Development of Equal Area Criterionscrib_111Оценок пока нет
- Signals and SystemsДокумент30 страницSignals and SystemsMohammad Gulam Ahamad100% (3)
- Brief Notes On Signals and Systems 7.2Документ77 страницBrief Notes On Signals and Systems 7.2Bhaskar Rao GopisettiОценок пока нет
- DSPДокумент94 страницыDSPRasha Hassan0% (1)
- Full-Wave Rectifier - VerstudДокумент26 страницFull-Wave Rectifier - VerstudLIEW HUI FANG UNIMAPОценок пока нет
- Unit6 Resonance Circuit (VTU)Документ23 страницыUnit6 Resonance Circuit (VTU)fanah_13100% (1)
- Week 6 - Z-TransformДокумент15 страницWeek 6 - Z-TransformRalph Ian CaingcoyОценок пока нет
- Reliability of Structures Chapter 1Документ28 страницReliability of Structures Chapter 1Phong NguyenОценок пока нет
- Homework 1Документ8 страницHomework 1Yooncheul JeungОценок пока нет
- Introduction To Random Processes Handouts PDFДокумент116 страницIntroduction To Random Processes Handouts PDFshaan76Оценок пока нет
- Digital Signal Processing NotesДокумент12 страницDigital Signal Processing NotesDanial ZamanОценок пока нет
- 09 04 Second Order Derivatives PDFДокумент19 страниц09 04 Second Order Derivatives PDFSri DОценок пока нет
- ECE Formula Sheet PDFДокумент44 страницыECE Formula Sheet PDFAnonymous Ndsvh2soОценок пока нет
- Lect 17 - Performance Parameters of Rectifier CircuitsДокумент40 страницLect 17 - Performance Parameters of Rectifier CircuitsShumaila AltafОценок пока нет
- Two Port Networks PPT 1 B TECH 3RDДокумент32 страницыTwo Port Networks PPT 1 B TECH 3RDEuthecas KipkiruiОценок пока нет
- EC1252-Signals and SystemsДокумент22 страницыEC1252-Signals and Systemsvikassheoran04100% (2)
- RZ1-K Power CableДокумент5 страницRZ1-K Power CablegarysОценок пока нет
- 05 Convolution of CT and DTДокумент63 страницы05 Convolution of CT and DTBhaskarОценок пока нет
- Digital Signal ProcessingДокумент7 страницDigital Signal Processingind sh1Оценок пока нет
- Introduction of Electric Power Transmission and DistributionДокумент12 страницIntroduction of Electric Power Transmission and Distributionnageen100% (1)
- Z TransformДокумент21 страницаZ Transformadil1122100% (3)
- AC Network Theorems: Prepared By: Karthik Chandran Pillai IV Sem, EEE (B)Документ22 страницыAC Network Theorems: Prepared By: Karthik Chandran Pillai IV Sem, EEE (B)hodeegits9526100% (1)
- What Is Three Ammeter Method - QuoraДокумент2 страницыWhat Is Three Ammeter Method - QuorakalokosОценок пока нет
- Design Via Root LocusДокумент53 страницыDesign Via Root LocusAhmed ShareefОценок пока нет
- Half Wave Rectifiers With Resistive and Inductive LoadДокумент5 страницHalf Wave Rectifiers With Resistive and Inductive Loadluqman059Оценок пока нет
- IC6701 May 18 With KeyДокумент14 страницIC6701 May 18 With KeyAnonymous yO7rcec6vuОценок пока нет
- Ece IV Signals & Systems (10ec44) AssignmentДокумент14 страницEce IV Signals & Systems (10ec44) AssignmentBlackArmy880% (1)
- Lec 13 PDFДокумент15 страницLec 13 PDFkapil chander100% (1)
- Q.1 List Various Type of Systems and Define Them Giving ExampleДокумент6 страницQ.1 List Various Type of Systems and Define Them Giving ExampleAbhishekОценок пока нет
- Power Divider, Combiner and CouplerДокумент60 страницPower Divider, Combiner and Couplergaurav_juneja_4Оценок пока нет
- Numerical IntegrationДокумент9 страницNumerical IntegrationAFERNU-EYO NYONGОценок пока нет
- Fourier Analysis of Signals and SystemsДокумент24 страницыFourier Analysis of Signals and SystemsBabul IslamОценок пока нет
- Qdoc - Tips Ece633f09hw2solutionsДокумент13 страницQdoc - Tips Ece633f09hw2solutionsTrần Trọng TiếnОценок пока нет
- Sect2-3 PDFДокумент10 страницSect2-3 PDFBlaiseОценок пока нет
- PQT FormulaДокумент13 страницPQT FormulalogeshnandaОценок пока нет
- OP01 Random VariablesДокумент57 страницOP01 Random VariablesNguyễn Ngọc TháiОценок пока нет
- Probability & Random Process: FormulasДокумент10 страницProbability & Random Process: FormulasvrsafeОценок пока нет
- Chapter 6F-PropCRV - W PDFДокумент30 страницChapter 6F-PropCRV - W PDFaltwirqiОценок пока нет
- Expectation: Definition Expected Value of A Random Variable X Is DefinedДокумент15 страницExpectation: Definition Expected Value of A Random Variable X Is DefinedLibyaFlowerОценок пока нет
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)От EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Оценок пока нет
- Iter PDFДокумент400 страницIter PDFHilton FernandesОценок пока нет
- 19MT1201 MFE Session Problems 2019 - 20Документ22 страницы19MT1201 MFE Session Problems 2019 - 20sai tejaОценок пока нет
- STA642 Handouts Topic 1 To 187 by Mahar Afaq Safdar MuhammadДокумент1 739 страницSTA642 Handouts Topic 1 To 187 by Mahar Afaq Safdar Muhammadhumairamubarak2001Оценок пока нет
- Reliability-Based Optimization of Transmission Line Towers: Pergamon 0045-7949 (94) 00468-4Документ17 страницReliability-Based Optimization of Transmission Line Towers: Pergamon 0045-7949 (94) 00468-4JitendraОценок пока нет
- Continuous DistributionsДокумент73 страницыContinuous DistributionssupiobiaОценок пока нет
- Mathematical ExpectationДокумент28 страницMathematical ExpectationKinPranОценок пока нет
- Exponential Distribution PDFДокумент2 страницыExponential Distribution PDFAngelОценок пока нет
- SMA B261-MutuaДокумент3 страницыSMA B261-MutuaMunialo GeorgeОценок пока нет
- 18MAB301T - P&S - Unit IДокумент54 страницы18MAB301T - P&S - Unit IjackОценок пока нет
- Expected Value of A PDFДокумент2 страницыExpected Value of A PDFAkramОценок пока нет
- VeerarajanДокумент7 страницVeerarajanManish Vohra0% (4)
- PTSPДокумент55 страницPTSPdunde.venu5393Оценок пока нет
- Cbcs Ba-Bsc Hons Sem-5 Mathematics Cc-11 Probability & Statistics-10230Документ5 страницCbcs Ba-Bsc Hons Sem-5 Mathematics Cc-11 Probability & Statistics-10230SDasОценок пока нет
- Unit II (Part 2) Probability DistributionsДокумент19 страницUnit II (Part 2) Probability Distributionssahil suranaОценок пока нет
- 9A21501 Mathematics For Aerospace EngineersДокумент4 страницы9A21501 Mathematics For Aerospace EngineerssivabharathamurthyОценок пока нет
- 3rd SemДокумент25 страниц3rd Semsaish mirajkarОценок пока нет
- Problems Set 2Документ6 страницProblems Set 2Hira Mohsin0% (1)
- Ptspunit2 VRCДокумент164 страницыPtspunit2 VRCGayathri KalyankarОценок пока нет
- Basic Stat AssignmentДокумент2 страницыBasic Stat AssignmentEllii YouTube channelОценок пока нет
- Notes 1Документ28 страницNotes 1Achidri JamalОценок пока нет
- Unit 4Документ15 страницUnit 4Deepak SinghОценок пока нет
- Random Variables: Prof. Megha SharmaДокумент35 страницRandom Variables: Prof. Megha SharmaAnil SoniОценок пока нет
- IE 231 - Chapter 4 Recitation (Part 1) : Expected Values of Random VariablesДокумент22 страницыIE 231 - Chapter 4 Recitation (Part 1) : Expected Values of Random VariablesDilay DemirОценок пока нет
- SIP 06 Restoration PDFДокумент70 страницSIP 06 Restoration PDFsanju subramaniОценок пока нет
- Simulation and Modelling - Cat TwoДокумент3 страницыSimulation and Modelling - Cat TwoKennedy KamauОценок пока нет
- L2 Probability ReviewДокумент42 страницыL2 Probability ReviewMoein RazaviОценок пока нет
- Stat 130n Answers To The LAs in Lessons 3.1-3.3Документ18 страницStat 130n Answers To The LAs in Lessons 3.1-3.3Faith GarfinОценок пока нет