Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- JarnickiДокумент147 страницJarnickifelipeplatziОценок пока нет
- Finite Grup TeoriДокумент19 страницFinite Grup TeoriEvi Sulastri TambunanОценок пока нет
- Complxanal z65Документ81 страницаComplxanal z65JacecosmozОценок пока нет
- Beameruserguide PDFДокумент243 страницыBeameruserguide PDFAnonymous VVzVhRJОценок пока нет
- Vvedensky D.-Group Theory, Problems and Solutions (2005)Документ94 страницыVvedensky D.-Group Theory, Problems and Solutions (2005)egmont7Оценок пока нет
- Group TheoryДокумент12 страницGroup TheoryfelipeplatziОценок пока нет
- A Very Minimal Introduction To TikZ - Jacques CremerДокумент24 страницыA Very Minimal Introduction To TikZ - Jacques CremerRUBAN SUGUMARОценок пока нет
- Lecture 7Документ25 страницLecture 7felipeplatziОценок пока нет
- Small GroupsДокумент36 страницSmall GroupsfelipeplatziОценок пока нет
- List of Small GroupsДокумент10 страницList of Small GroupsfelipeplatziОценок пока нет
- Small GroupsДокумент36 страницSmall GroupsfelipeplatziОценок пока нет
- List of Small GroupsДокумент10 страницList of Small GroupsfelipeplatziОценок пока нет
- Sydsaether Students Manual Further Smfmea2Документ115 страницSydsaether Students Manual Further Smfmea2micpic100% (1)
- Small GroupsДокумент36 страницSmall GroupsfelipeplatziОценок пока нет
- Foundations of Mathematical EconomicsДокумент666 страницFoundations of Mathematical EconomicsPrajesh Kumar Panda100% (1)
- Beameruserguide PDFДокумент243 страницыBeameruserguide PDFAnonymous VVzVhRJОценок пока нет
- Stein and Real Analytic ManifoldsДокумент86 страницStein and Real Analytic ManifoldsfelipeplatziОценок пока нет
- Optimization Basic PrinciplesДокумент38 страницOptimization Basic PrinciplesfelipeplatziОценок пока нет
- Complex Analysis and CR GeometryДокумент205 страницComplex Analysis and CR Geometryfelipeplatzi100% (1)
- A Very Minimal Introduction To TikZ - Jacques CremerДокумент24 страницыA Very Minimal Introduction To TikZ - Jacques CremerRUBAN SUGUMARОценок пока нет
- YasserДокумент260 страницYasserfelipeplatzi100% (1)
- Problems in Complex Variable TheoryДокумент300 страницProblems in Complex Variable TheoryfelipeplatziОценок пока нет
- Isometry RNДокумент18 страницIsometry RNfelipeplatziОценок пока нет
- Introduction To Linear Algebra For Science and Engineering 1st EdДокумент550 страницIntroduction To Linear Algebra For Science and Engineering 1st EdJoe92% (51)
- Multisim Digital PrimerДокумент62 страницыMultisim Digital Primersuresh151971Оценок пока нет
- Roger BakerДокумент327 страницRoger BakerfelipeplatziОценок пока нет
- Introduction To Linear Algebra For Science and Engineering 1st EdДокумент550 страницIntroduction To Linear Algebra For Science and Engineering 1st EdJoe92% (51)
- Isometry RNДокумент18 страницIsometry RNfelipeplatziОценок пока нет
- RomanДокумент135 страницRomanfelipeplatziОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- 666 Antichrist Revealed June 6 2006Документ15 страниц666 Antichrist Revealed June 6 2006Nyxstory0% (1)
- PbifinalpaperДокумент10 страницPbifinalpaperapi-277946598Оценок пока нет
- NCR FINAL Q3 ENG10 M1 ValДокумент15 страницNCR FINAL Q3 ENG10 M1 Valadditional accountОценок пока нет
- DFo 6 3 ProjectSolutionДокумент4 страницыDFo 6 3 ProjectSolutionMilanAdzic100% (2)
- CWV101 - Orgins - AudrianaOrtizBurnsДокумент4 страницыCWV101 - Orgins - AudrianaOrtizBurnsAudriana Ortiz-BurnsОценок пока нет
- Mandavya Integrated Pu CollegeДокумент4 страницыMandavya Integrated Pu CollegeSahaana VMОценок пока нет
- Andalusi Muwashshaha and KharjaДокумент176 страницAndalusi Muwashshaha and KharjaMahomad Abenjúcef100% (2)
- Forti AnalyzerДокумент2 страницыForti AnalyzerneilОценок пока нет
- Emotional BehavioralДокумент13 страницEmotional BehavioralderiraОценок пока нет
- CLP Talk 10 (Growing in The Spirit)Документ48 страницCLP Talk 10 (Growing in The Spirit)Ronie ColomaОценок пока нет
- English Phonetics - Task 2 - Practical Exercises FINISHED WITH LINKДокумент4 страницыEnglish Phonetics - Task 2 - Practical Exercises FINISHED WITH LINKjonathanmplusОценок пока нет
- Sentence StructuresДокумент6 страницSentence StructurestrandinhgiabaoОценок пока нет
- Obedience (Beginner 1 B) .A1 Movers 9 Test 3 Reading & Writing (P 1-6) .Документ19 страницObedience (Beginner 1 B) .A1 Movers 9 Test 3 Reading & Writing (P 1-6) .Umroh SyafitriОценок пока нет
- Wikipedia PowerShellДокумент13 страницWikipedia PowerShellIonutGonzoОценок пока нет
- Virtual Private DatabasesДокумент7 страницVirtual Private DatabasesJawad AhmedОценок пока нет
- English MCQs For UGC NET - True Blue GuideДокумент13 страницEnglish MCQs For UGC NET - True Blue GuideTrue Blue GuideОценок пока нет
- CBSE Class 8th English 2016 17Документ7 страницCBSE Class 8th English 2016 17cxsdvОценок пока нет
- XasДокумент29 страницXasRicardogcОценок пока нет
- 2 3 3 (English L&L)Документ12 страниц2 3 3 (English L&L)Charushree ChundawatОценок пока нет
- As Per The Requirement of Neb Examination of Grade Xi Computer Science Based Project ON Report Generating System BATCH (2077, 2078)Документ36 страницAs Per The Requirement of Neb Examination of Grade Xi Computer Science Based Project ON Report Generating System BATCH (2077, 2078)PRANISH RAJ TULADHARОценок пока нет
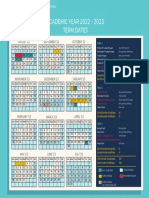
- BVIS Calendar 22-23Документ1 страницаBVIS Calendar 22-23SÁI PHUОценок пока нет
- Elapsed Time LessonДокумент3 страницыElapsed Time Lessonapi-2492380990% (1)
- Antennas in Satellite Communication Chapter SixДокумент30 страницAntennas in Satellite Communication Chapter SixAhmed Isam AhmedОценок пока нет
- Year5 Test1Документ17 страницYear5 Test1gracamoraisОценок пока нет
- Adjective Adverb Worksheets 2 - GrammarBankДокумент3 страницыAdjective Adverb Worksheets 2 - GrammarBankNilson Guevara BenavidesОценок пока нет
- Live Project of Business Research MethodsДокумент11 страницLive Project of Business Research Methodsmuthu_voilaОценок пока нет
- Soalan Tutorial EDU 3102 Child Development Jan 2013Документ2 страницыSoalan Tutorial EDU 3102 Child Development Jan 2013Hamzah ShibliОценок пока нет
- Words and SentencesДокумент163 страницыWords and SentencesEduardo CastellanosОценок пока нет
- First Steps - Answer KeyДокумент35 страницFirst Steps - Answer Keyzod-el99200281% (36)
- UMA wIQ Rel1.7 V1.6Документ291 страницаUMA wIQ Rel1.7 V1.6iamsipmasterОценок пока нет