Академический Документы
Профессиональный Документы
Культура Документы
Curso de Metodos Numericos
Загружено:
Henry ValverdeОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Curso de Metodos Numericos
Загружено:
Henry ValverdeАвторское право:
Доступные форматы
UNIVERSIDAD NACIONAL AUTNOMA DE MXICO
FACULTAD DE ESTUDIOS SUPERIORES ARAGN
DIVISIN DE LAS CIENCIAS FSICO MATEMTICAS
Y LAS INGENIERAS
CARRERA DE INGENIERA MECNICA ELCTRICA
VII ENCUENTRO MULTIDISCIPLINARIO DE INVESTIGACIN 2010
AVANCES DE INVESTIGACIN:
SOLUCIN NUMRICA DE SISTEMAS DE ECUACIONES
LINEALES MEDIANTE MATLAB Y SU APLICACIN EN
INGENIERA
EJE TEMTICO:
LA INVESTIGACIN EN LAS CIENCIAS FSICO MATEMTICAS E
INGENIERAS.
AUTOR: ING. LUIS LORENZO JIMNEZ GARCA
VII ENCUENTRO MULTIDISCIPLINARIO DE INVESTIGACIN 2010
SOLUCIN NUMRICA DE SISTEMAS DE ECUACIONES LINEALES
MEDIANTE MATLAB Y SU APLICACIN EN INGENIERA
Autor: Ing. Luis Lorenzo Jimnez Garca
Prof.. de la Facultad de Estudios Superiores Aragn-UNAM. .
Resumen. Los sistemas de ecuaciones lineales se utilizan para resolver muchos
problemas de la ciencia y la ingeniera. La solucin numrica de dichos sistemas la
forman una gran variedad de algoritmos, como eliminacin de Gauss, Gauss-Jordan,
Gauss-Seidel, Montante, Jacobi, Lu y Cholesky entre otros, que de una manera u otra
resuelven el sistema de ecuaciones lineales (si tiene solucin). Sin embargo, cuando se
trata de problemas muy complejos en donde intervienen muchas ecuaciones, se requiere
de muchas operaciones aritmticas que pueden provocar caer en el tedio y el
aburrimiento por tanto clculo, entonces, debe emplearse una alternativa para el
aprendizaje. Actualmente, los Mtodos Numricos tienen auge con la llegada de las
computadoras y en especial para resolver sistemas de ecuaciones lineales que requieren
clculos matemticos extremadamente complejos. Para el desarrollo de los algoritmos se
ha empleado el paquete de clculo numrico, simblico y grfico MatLab. Este software
constituye una poderosa herramienta para resolver problemas de ingeniera, dnde estn
involucradas los sistemas lineales por sus algoritmos implementados a travs de sus
comandos y funciones. MatLab se debe usar apropiadamente y no viene a sustituir el
conocimiento impartido en el aula, se debe empelar como un recurso didctico para hacer
ms atractiva la enseanza aprendizaje de los Mtodos Numricos.
Palabras claves: ecuaciones lineales, sistemas, mtodos, comandos, funciones, grficas.
Summary. The systems of linear equations are used to solve many problems of science
and engineering. The numerical solution of these systems forms a great variety of
algorithms, like elimination of Gaussian, Gaussian-Jordan, Gaussian-Seidel, Post, Jacobi,
Lu and Cholesky among others, who of a way or another one solve the system of linear
equations (if he has solution). Nevertheless, when one is very complex problems where
many equations take part, it is required of many arithmetical operations that can cause to
fall in the boredom and the boredom therefore calculation, then, must be used an
alternative for the learning. At the moment, the Numerical Methods have height with the
arrival of the computers and to especially solve systems of linear equations that require
extremely complex mathematical calculations. For the development of the algorithms the
package of numerical calculation, symbolic and graphical MatLab has been used. This
software constitutes a powerful tool to solve engineering problems, where the linear
systems by their algorithms implemented through their commandos and functions are
involved. MatLab is due to use appropriately and it does not come to replace the
knowledge distributed in the classroom, is due to empelar like a didactic resource to make
education more attractive learning of the Numerical Methods.
Key words: linear equations, systems, methods, commandos, functions, graphs
SOLUCIN NUMRICA DE SISTEMAS DE ECUACIONES LINEALES
MEDIANTE MATLAB Y SU APLICACIN EN INGENIERA
ENUNCIADO DEL PROBLEMA. Aplicacin de los comandos y funciones MatLab
para la solucin numrica de sistemas de ecuaciones lineales en ingeniera y su
implementacin, as como el empleo de las funciones grficas de MatLab para
representar geomtricamente dichos sistemas.
PLANTEAMIENTO DEL PROBLEMA. El uso de las tecnologas se ha utilizado
como recurso didctico en la bsqueda de nuevos mtodos de enseanza-
aprendizaje. Estos avances tecnolgicos han generado software de aplicacin
(como MatLab) que hace que sea especialmente interesante reflexionar acerca de
cmo esas tecnologas pueden modificar los procesos de enseanza y
aprendizaje de los Mtodos Numricos. Las experiencias de ms de 30 aos de
actividades acadmica en el rea de fsico matemticas y en especial de la
imparticin de la asignatura de Mtodos Numricos a los estudiantes de las
diferentes carreras de ingeniera de FES Aragn, ha demostrado que el uso de
MatLab como un recurso didctico de apoyo en la solucin de problemas, propicia
y despierta el inters por la parte algortmica y analtica que contiene los Mtodos
Numricos. No se debe olvidar que estas tecnologas en s mismas no promueven
el aprendizaje y no constituyen ninguna panacea de carcter universal ni ninguna
garanta de eficacia pedaggica, todo depender de la opcin y concepcin
pedaggica por la cual se elija disear un determinado modelo educativo. Por
ltimo, basado en la experiencia, se ha hecho una investigacin de corte
cuantitativo, cuya fuente de investigacin por profundidad es descriptiva. La
informacin se obtuvo en forma experimental, siguiendo una metodologa
cuantitativa y de investigacin comparada.
DELIMITACIN DEL PROBLEMA. El presente trabajo contempla cubrir los
mtodos de solucin numrica para resolver sistemas de ecuaciones lineales,
mediante las funciones y comandos MatLab \, inv, rref, rrefmovie, solve, linsolve,
lu, chol y eig, que ayuden al proceso enseanza aprendizaje de los Mtods
Numricos a los alumnos de ingeniera mecnica elctrica, ingeniera industrial,
ingeniera mecnica e ingeniera elctrica electrnica.
OBJETIVOS:
- Ensear al alumno diversas tcnicas numricas para encontrar (si existe) la
solucin de sistemas de ecuaciones lineales.
- Aplicar los mtodos de eliminacin de Gauss, matriz inversa, Gauss-
Jordan, y Factorizacin de LU y Cholesky, para obtener la solucin
numrica de sistemas de ecuaciones lineales.
- Aplicar las capacidades de visualizacin grfica de MatLab, para la
solucin de sistemas de ecuaciones lineales en ingeniera.
1. INTRODUCCIN.
Por sistema de ecuaciones lineales se entiende un conjunto de ecuaciones que
deben resolverse simultneamente y que presentan la siguiente estructura:
M N N M M M M
N N
N N
N N
b x a x a x a x a
b x a x a x a x a
b x a x a x a x a
b x a x a x a x a
= + + + +
= + + + +
= + + + +
= + + + +
. . .
. . . . .
. . . . .
. . . . .
. . .
. . .
. . .
3 3 2 2 1 1
3 3 3 33 2 32 1 31
2 2 3 23 2 22 1 21
1 1 3 13 2 12 1 11
(1)
Este sistema de M ecuaciones algebraicas lineales con N incgnitas puede
escribirse en forma matricial como:
B X A
N x M
=
donde:
(
(
(
(
(
(
(
=
N M M M M
N
N
N x M
a a a a
a a a a
a a a a
A
. . .
. . . .
. . . .
. . .
. . .
3 2 1
2 4 2 2 2 1 2
1 3 1 2 1 1 1
(
(
(
(
(
(
=
N
x
x
x
X
.
.
2
1
(
(
(
(
(
(
=
M
b
b
b
B
.
.
2
1
(2)
La matriz de coeficientes A se llama matriz del sistema. La matriz formada por A, a
la que se le ha agregado el vector de trminos independientes B como ltima
columna, se le llama la matriz ampliada o matriz aumentada del sistema de
ecuaciones, que se representa por [A | B] y X es el vector de incgnitas.
Antes de proceder a resolver un sistema de ecuaciones es necesario determinar si
dicho sistema tiene o no solucin y, en caso de tenerla, cuntas posibles
soluciones tiene. A continuacin se presentan las diversas alternativas:
lineales
ecuaciones
de Sistema
ado Indetermin
trivial) ( solucin o Determinad
Compatible Homogneo
le Incompatib
ado Indetermin
o Determinad
Compatible
homogneo No
Si el vector de trminos independientes B del sistema dado en (2) es diferente de
cero se dice que el sistema de ecuaciones es no homogneo y en caso contrario
el sistema es homogneo.
Sistema compatible o consistente. Es aqul que tiene solucin y en este caso se
cumple que (Teorema de Rouch-Frobenius):
rango[A] = rango [ A | B ]
El rango de una matriz es el nmero de columnas linealmente independientes.
Tambin es el orden de determinante no nulo de mayor orden que puede
obtenerse de esa matriz.
Sistema incompatible o inconsistente. Es aqul que no tiene solucin y cumple la
relacin:
rango[A] < rango [ A | B ]
Sistema determinado. Es un sistema compatible que presenta solucin nica y en
este caso se verifica que:
rango[A] = nmero de incgnitas
Un sistema homogneo que es determinado tiene nicamente la solucin trivial
X=0.
Un sistema compatible que presenta infinidad de soluciones se conoce como
sistema indeterminado y se caracteriza por:
rango[A] < nmero de incgnitas
2. COMANDOS Y FUNCIONES MATLAB PARA SOLUCIN NUMRICA DE
LOS SISTEMAS DE ECUACIONES LINEALES.
La siguiente tabla muestra las funciones y comandos empleados en MatLab para
la solucin numrica de sistemas de ecuaciones lineales, valores caractersticos
(eigenvalores) y vectores caractersticos (eigenvectores) de una matriz no
singular.
Funcin Descripcin
syms x y z . . . t Convierte las variables x y z . . . t en simblicas.
solve(ec1,ec2,
ecn,x1,x2,xn`)
Resuelve n ecuaciones lineales simultneas ec1, ec2, ecn.
(Sistema de las variables x1, x2, xn).
X = linsolve(A,B)
Resuelve un sistema de ecuaciones lineales del tipo A*X=B
para una matriz cuadrada A, siendo B la matriz del trmino
independiente del sistema de ecuaciones.
X = A\B
Resuelve el sistema triangular A*X=B. Emplea eliminacin de
Gauss.
X = inv(A)*B Resuelve el sistema A*X=B. Emplea la matriz inversa.
X = rref([A, B])
Obtiene la matriz reducida escalonada por renglones de A,
utilizando el mtodo de Gauss-Jordan, en la cual, la diagonal
principal tiene 1 y los dems elementos 0. El nmero de
renglones no nulos de rref.(A) es el rango de A. Adems,
muestra cuando un sistema es incompatible o indeterminado
mediante el vector de trminos independientes B.
rrefmovie( [A, B] )
Muestra el procedimiento paso a paso de la solucin del
sistema de ecuaciones lineales haciendo, incluso, cambio de
renglones para facilitar los clculos, mostrando el resultado
final.
[L , U] = lu(A)
Descomposicin (Factorizacin) LU. Devuelve una matriz
triangular superior U y una matriz triangular inferior L
(triangularizable mediante permutacin). Se cumple que
A=L*U. Resuelve el sistema de ecuaciones lineales mediante
la operacin: X = U \ ( L\ B).
U = chol(A)
Descomposicin (Factorizacin) de Cholesky de una matriz
simtrica y definida positiva. Devuelve la matriz triangular
superior U de A. Slo se utiliza la diagonal y la parte triangular
superior de A. Si A no es definida positiva devuelve un error.
Se cumple que A = U' * U. Resuelve el sistema de ecuaciones
lineales mediante la operacin X = U \ ( U \ B).
A Matriz transpuesta de A.
inv(A)
Calcula, si existe, la matriz inversa de la matriz cuadrada A
(A
-1
).
det(A) Determinante de la matriz cuadrada A.
rank(A) Rango de la matriz A.
e = eig(A)
Halla los valores caractersticos (eigenvalores) de la matriz
cuadrada A. Es decir, calcula directamente las races que
definen al polinomio caracterstico de la matriz A.
[ V, D] = eig(A,B)
Halla la matriz diagonal D de valores caractersticos
generalizados de la matrices cuadradas A y B y una matriz V,
cuyas columnas son los vectores caractersticos
correspondientes, cumplindose que A*V=B*V*D.
P = poly(A)
Calcula los coeficientes del polinomio caracterstico de la
matriz cuadrada A.
2.1 Mtodo de Eliminacin de Gauss.
El software MatLab encuentra la solucin de ecuaciones algebraicas lineales
simultneas, dadas en (3.1), mediante el mtodo de eliminacin de Gauss usando
la forma dada en el sistema (3.2) mediante la operacin: X = A \ B. Es decir, usa el
operador aritmtico \ (Divisin izquierda de la matriz).
Ejemplo 1. Resuelve el siguiente sistema de ecuaciones lineales por el mtodo
de eliminacin de Gauss:
15 5 2
21 8 4
7 4
= + +
= +
= +
z y x
z y x
z y x
(
(
(
=
5 1 2
1 8 4
1 1 4
A
(
(
(
=
15
21
7
B (3)
Solucin:
Escribiendo el sistema de matrices dado en (3) en forma de vectorial, tenemos:
>> A = [4 -1 1; 4 -8 1; -2 1 5]; B = [ 7; -21; 15]
B =
7
-21
15
>> X= A\ B
X =
2
4
3
Nota: La solucin es X = 2, Y = 4, Z = 3
Con ayuda de MatLab podemos visualizar el comportamiento grfico del sistema
de ecuaciones lineales dado en (3)
Usando el comando surf para graficar, tenemos las figuras 1, 2 y 3:
>>[x y] = meshgrid(-5:0.5:10);
>> z = 7 - 4*x + y;
Realiza la grfica de la primera ecuacin
>>surf(x,y,z)
>> xlabel('Eje X')
>> ylabel('Eje Y')
>> zlabel('Eje Z')
>> hold on % Permite graficar el sistema sobre la
misma figura.
>>z = -21 - 4*x + 8*y;
Realiza la grfica de la segunda ecuacin
>>surf(x,y,z)
>> z = 15 + 2*x - y;
Realiza la grfica de la tercera ecuacin
>>surf(x,y,z)
Figura 1. Representacin grfica de la ecuacin 1 del sistema (3)
Figura 2. Representacin grfica de la ecuacin 1 y 2 del sistema (3)
Figura 3. Representacin grfica de la ecuacin 1, 2 y 3 del sistema (3)
Se obtienen los tres planos de la figura 3 interceptados en el punto (2, 4, 3).
Recuerde que se puede observar mejor el punto de intercepcin en la ventana
grfica de MatLab, rotando la figura (rotate 3D), en la barra de herramienta de
Figure. Como se puede observar en la figura 3 es muy difcil determinar
visualmente el punto de intercepcin del sistema de las tres ecuaciones lineales,
por lo que son necesarios los mtodos numricos para resolver dichos sistemas.
Ejemplo 2. Resuelve el siguiente sistema de ecuaciones lineales por el mtodo
de eliminacin de Gauss:
24 9 3 6
10 5 2
12 3 2
3 2 1
3 2 1
3 2 1
=
= + +
= + +
X X X
X X X
X X X
(
(
(
=
9 3 6
5 2 1
3 1 2
A
(
(
(
=
24
10
12
B (4)
Solucin:
Escribiendo el sistema (4) en forma vectorial y usando el operador \ tenemos:
>> A = [-2 1 3; 1 2 5; 6 -3 -9];
>> B = [12; 10; 24];
>> X = A\ B
Warning: Matrix is singular to working precision.
X =
Nan
-Inf
Inf
Se observa que el mtodo de eliminacin de Gauss no puede encontrar la
solucin del sistema dado en (4), debido a que es una matriz singular.
Usando el comando surf, obtenemos el comportamiento grfico del sistema dado
en (4) como se observa en la figura 4.
Las dos variables tienen el mismo intervalo
>> [x1 x2] = meshgrid( - 10: 0.5: 10);
>> x3 = (12 + 2*x1 - x2)/3;
>> surf(x1, x2, x3)
>> hold on
>> xlabel('Eje X_1')
>> ylabel('Eje X_2')
>> zlabel('Eje X_3')
>> x3 = (10 -x1-2*x2)/5;
>> surf(x1,x2,x3)
>> x3= (24 - 6*x1 + 3*x2)/( -9 );
>> surf(x1,x2,x3)
Figura 4 Grfica de un sistema inconsistente
Se puede observar en la figura 4 que los tres planos de las rectas nunca se cruzan
y por lo tanto no existe un punto en comn, es decir, el sistema es incompatible o
inconsistente (no tiene solucin).
Ejemplo 3. Resuelve el siguiente sistema de ecuaciones lineales por el mtodo
de eliminacin de Gauss:
7 2
8 2
0 5 2 3
3 2 1
3 2 1
3 2 1
= + +
= +
= +
X X X
X X X
X X X
(
(
(
=
1 1 2
1 2 1
5 2 3
A
(
(
(
=
7
8
0
B (5)
Solucin:
Escribiendo los datos del sistema dado en (5), tenemos:
>> A = [3 2 -5; -1 2 -1; -2 1 1]; B = [0; -8; -7];
>> X = A\B
Warning: Matrix is singular to working precision.
X =
Nan
-Inf
-Inf
Usando el comando sur f(como en los casos anteriores), obtenemos el
comportamiento grfico del sistema dado en (5) como se observa en la figura 5.
Figura 5 Grfica de un sistema indeterminado
Se puede observar en la figura 5 que los tres planos son interceptados por una
lnea recta. Esto significa que el sistema tiene muchas soluciones, es decir, es
compatible indeterminado y todas las soluciones se encuentran sobre la lnea
recta. En este caso MatLab no puede determinar cuando un sistema no tiene
solucin o tiene infinidad de soluciones, pues manda el mismo mensaje de salida
para ambos sistemas.
2.2 Mtodo de la Matriz Inversa
Es aplicable si el sistema tiene igual nmero de ecuaciones que de incgnitas
(matriz cuadrada) y el determinante de la matriz de coeficientes A es distinto de
cero. Es decir, resuelve sistemas compatibles determinados (no-homogneos).
Por medio de MatLab, la solucin del sistema se hace mediante la operacin X =
inv(A)*B. Se fundamenta en:
B A X B A X I B A X A A B X A * * * * * * *
1 1 1 1
= = = =
Ejemplo 4. Resuelve los sistemas dados en (3), (4) y (5) por el mtodo de la
matriz inversa.
Solucin:
Escribiendo las instrucciones de MatLab tenemos:
>> A = [4 -1 1; 4 -8 1; -2 1 5]; B = [ 7; -21; 15];
>> d = det(a) % Determinante de A
d =
-154
>> X = inv(A)*B
X = 2.0000 4.0000 3.0000
>> A = [-2 1 3; 1 2 5; 6 -3 -9]; B = [12; 10; 24];
>> determinante = det(A)
determinante =
0
Veamos que sucede si no se cumple
d 0
>> X = inv(A)*B
Warning: Matrix is singular to working precision.
X =
Inf
Inf
Inf
>> A = [3 2 -5; -1 2 -1; -2 1 1]; B = [0; -8; -7];
>> determinante = det(A)
determinante =
0
No se cumple que det(a) 0
>> X = inv(A)*B
Warning: Matrix is singular to working precision.
X =
NaN
NaN
NaN
El operador matricial de MatLab "\" divisin izquierda equivale a la solucin de
sistemas lineales mediante X = inv(A)*B. este operador es ms poderoso de lo
que parece, puesto que suministra la solucin aunque la matriz A no tenga inversa
y adems proporciona solucin directa sobre sistemas indeterminados.
2.3 Mtodo de Gauss-Jordan
Es una variante del mtodo de Gauss y resulta ser ms simple al final del proceso,
ya que no es necesario despejar las variables, pues la solucin se obtiene
directamente. Se basa en diagonalizar la matriz de coeficientes, esto es, obtener
la matriz identidad, que consiste en hacer 1 la diagonal principal y 0 los dems
elementos de la matriz (Matriz escalonada) . MatLab calcula la solucin del
sistema mediante el comando X=rref([A,B]).
Ejemplo 5. Resuelve los sistemas dados en (3), (4) y (5) por el mtodo de
Gauss-Jordan.
Solucin:
MatLab encuentra la solucin convirtiendo la matriz A en matriz identidad I y la
ltima columna es el vector solucin del sistema.
Utilizando el comando rref para resolver los sistemas mencionados, tenemos:
>> A = [4 -1 1; 4 -8 1; -2 1 5]; B = [7; -21; 15];
>> X = rref([A B])
X =
1 0 0 2
0 1 0 4
0 0 1 3
Nota: La solucin es x = 2, y = 4, z = 3
>> A = [-2 1 3; 1 2 5; 6 -3 -9]; B = [12; 10; 24];
>> X = rref([A B])
X =
1.0000 0 -0.2000 0
0 1.0000 2.6000 0
0 0 0 1.0000
Nota: Se observa en el tercer rengln que 0=1, por lo que el
sistema es incompatible, es decir, no tiene solucin.
>> A = [3 2 -5; -1 2 -1; -2 1 1]; B = [0; -8; -7];
>> X = rref([A B])
X =
1 0 -1 2 X
1
- X
3
= 2
0 1 -1 - 3 X
2
- X
3
= -3
0 0 0 0
Nota: Se observa en el tercer rengln que 0 = 0, por lo que el
sistema es indeterminado, es decir, tiene muchas soluciones y
se resuelve dando un valor arbitrario a cualquiera de las
incgnitas.
Por ejemplo, si X
3
=1, X
1
=3 y X
2
=-2.
Si deseamos ver el procedimiento paso a paso del mtodo de Gauss-Jordan,
usamos el comando rrefmovie([A B]).
Utilizando el comando rrefmovie para analizar el sistema dado en (3) tenemos
(MatLab despliega el proceso de solucin paso por paso):
>> A = [4 -1 1; 4 -8 1; -2 1 5];
>> B = [ 7; -21; 15];
>> rrefmovie([A B])
2.4 Uso de los Comandos solve y linsolve
Se usan para resolver sistemas con n ecuaciones simultneas. Los comandos
solve y linsolve aceptan el sistema como entrada en su sintaxis y resuelve
ecuaciones del tipo A*X = B.
Ejemplo 6. Resuelve los sistemas dados en (3), (4) y (5) usando los comandos
solve y linsolve.
Solucin:
Utilizando los comandos solve y linsolve para resolver los sistemas mencionados,
tenemos:
Los resultados en realidad se proporcionan en forma vertical.
>> [x,y,z] = solve('4*x-y+z=7','4*x-8*y+z=-21','-
2*x+y+5*z=15','x', 'y','z')
x = 2 y = 4 z = 3
La sintaxis tambin se puede escribir de la siguiente forma:
>>[x,y,z] = solve('4*x-y+z=7,4*x-8*y+z=-21, -2*x+y+5*z=15','x,
y,z')
x = 2 y = 4 z = 3
Tambin puede utilizarse la sintaxis siguiente:
>> A = [4 -1 1; 4 -8 1; -2 1 5]; B = [ 7; -21; 15];
>> X = linsolve(A,B)
X = 2 4 3
>> A = [-2 1 3; 1 2 5; 6 -3 -9]; B = [12; 10; 24];
>> X = linsolve(A,B)
Warning: Matrix is singular to working precision.
X =
NaN
-Inf
Inf
Nota: linsolve, ni solve encuentran la solucin, por ser un
sistema incompatible.
>> A = [3, 2, -5; -1, 2, -1; -2, 1, 1];
>> B = [0; -8; -7];
>> x = linsolve(A,B)
Warning: Matrix is singular to working precision.
X =
NaN
-Inf
Inf
Nota: linsolve, ni solve encuentran la solucin, por ser un
sistema indeterminado
Es ms fcil usar linsolve que solve porque trabaja con vectores matriciales al
igual que los mtodos anteriores, aunque didcticamente solve presenta mejor los
resultados y se manipula directamente el sistema de ecuaciones lineales.
Los comandos \ , rref, linsolve tambin resuelven sistemas de ecuaciones lineales
con ms ecuaciones que incgnitas y viceversa.
2.5 Mtodos de Descomposicin (Factorizacin)
2.5.1 Descomposicin LU
Cuando tenemos un sistema de n ecuaciones con n incgnitas b Ax = , donde A
es la matriz de coeficientes (cuadrada de orden NxN), sabemos que el sistema
tiene solucin nica si y slo si el determinante de la matriz es no nulo, esto es, la
matriz es invertible. Entonces, para resolver el sistema hay que multiplicar ambos
lados de la ecuacin, por la inversa de la matriz A. Sin embargo, calcular la
inversa de la matriz es un proceso tedioso manualmente, en lugar de eso,
introduciremos el concepto de factorizacin triangular. Lo que se hace es
descomponer la matriz A como el producto de dos matrices que llamamos L
(Lower-inferior) y U (Upper-superior), esto es, U L A * = . La matriz L es una matriz
triangular inferior, cuyos elementos en la diagonal principal son todos iguales a
uno (ceros sobre la diagonal principal), y la matriz U es una matriz triangular
superior con elementos en la diagonal distintos de cero (ceros bajo la diagonal
principal).
Una vez que tenemos la descomposicin, si b Ax = y U L A * = , entonces
b x U L = * . Ahora, multiplicando por la inversa de L a ambos lados de la ecuacin,
se tiene que b L x U
1
= y multiplicando a ambos lados por la inversa de U
tenemos finalmente: b L U x
1 1
*
= . La ventaja de esto es que calcular la inversa
de una matriz triangular (inferior o superior) es ms sencillo que calcular la inversa
de la matriz A. Este proceso se realiza suponiendo que no hay intercambio de
renglones.
Sin embargo, puede ocurrir que una matriz invertible A no admita factorizacin
U L A * = , entonces, es necesario usar una matriz de permutacin P (matriz NxN
tal que en cada rengln y en cada columna slo tienen un elemento igual a 1,
siendo todos los dems valores iguales a cero) que permita la factorizacin.
Entonces, para encontrar la solucin del sistema de ecuaciones lineales, la
descomposicin LU se reescribe como:
b P L U x b P L x U b P x U L U L A P * * * * * * * * *
1 1 1
= = = =
En la descomposicin LU, la matriz inferior L tiene nmeros 1 en la diagonal.
Formalmente, a este proceso se le llama descomposicin o factorizacin de
Doolittle y al mtodo alternativo que usa una matriz superior U con nmeros 1
sobre la diagonal se le conoce como descomposicin de Crout.
Para llevar a cabo la descomposicin (factorizacin) LU de una matriz no singular
A, MatLab usa el comando lu(A) y obtiene la solucin del sistema de ecuaciones
lineales mediante la operacin: X = U \ ( L\ B).
Ejemplo 7. Resuelve los sistemas dados en (3), (4) y (5) usando la
descomposicin LU.
Solucin:
Escribiendo las instrucciones en la ventana de comandos de MatLab tenemos:
>> A = [4 -1 1; 4 -8 1; -2 1 5]; B = [ 7; -21; 15];
>> [L U] = lu(A)
L =
1.0000 0 0
1.0000 1.0000 0
-0.5000 -0.0714 1.0000
U =
4.0000 -1.0000 1.0000
0 -7.0000 0
0 0 5.5000
Obtencin de la solucin del sistema
>> sol_sistema = U\(L\B)
sol_sistema = 2 4 3
La solucin de los sistemas (4) y (5) es la misma que la dada por los mtodos
anteriores.
2.6.2 Descomposicin de Cholesky
Para llevar a cabo la descomposicin (factorizacin) de Cholesky de una matriz A
definida positiva, MatLab usa el comando chol(A) y resuelve el sistema de
ecuaciones lineales mediante la operacin: X = U \ ( U \ B).
Ejemplo 8. Resuelva los sistemas dados en (3), (4) y (5), usando la
descomposicin de Cholesky.
Solucin:
Usando el comando chol para resolver los sistemas mencionados, tenemos:
>> A = [4 -1 1; 4 -8 1; -2 1 5]; B = [ 7; -21; 15];
>> U = chol(A)
??? Error using ==> chol
Matrix must be positive definite.
(La matriz debe ser definida positiva)
>> A = [-2 1 3; 1 2 5; 6 -3 -9]; B = [12; 10; 24];
>> U = chol(A)
??? Error using ==> chol
Matrix must be positive definite.
La matriz debe ser definida positiva)
>> A = [3, 2, -5; -1, 2, -1; -2, 1, 1]; B = [0; -8; -7];
>> u = chol(a)
??? Error using ==> chol
Matrix must be positive definite.
(La matriz debe ser definida positiva)
Como se puede observar el mtodo de descomposicin de Cholesky tiene ms
limitaciones para su uso. Hagamos un ejemplo para una matriz definida positiva.
>> A = [4 2 2 4; 2 5 7 0; 2 7 19 11; 4 0 11 25];
>> B = [-1; 1; 2.5; 0.25];
>> [A B]
ans =
4.0000 2.0000 2.0000 4.0000 -1.0000
2.0000 5.0000 7.0000 0 1.0000
2.0000 7.0000 19.0000 11.0000 2.5000
4.0000 0 11.0000 25.0000 0.2500
>> U = chol(A)
U =
2 1 1 2
0 2 3 -1
0 0 3 4
0 0 0 2
>> [U L] = chol(A)
U =
2 1 1 2
0 2 3 -1
0 0 3 4
0 0 0 2
L =
0
>> sol = U\(U'\B)
sol =
-0.8125
0.8750
-0.2500
0.2500
Nota: Como se puede observar, Cholesky solamente emplea la
matriz superior U.
2.7 Valores y Vectores Caractersticos o Propios de Una Matriz
Sea A una matriz cuadrada de orden n y considrese la ecuacin vectorial Ax =
x, donde es un valor escalar. El vector nulo x = 0 es una solucin (trivial) de la
ecuacin vectorial. Un valor del escalar que satisface la ecuacin mencionada
con 0 = x se llama valor caracterstico, propio o eigenvalor de la matriz A. El vector
0 = x es el vector caracterstico propio o eigenvector de A, correspondiente al valor
caracterstico .
Para cada valor caracterstico existe un vector caracterstico x. Una matriz
cuadrada de orden n tiene cuando ms n valores caractersticos.
El planteamiento de la ecuacin vectorial dada se emplea frecuentemente en
problemas de resistencia de materiales, donde los valores caractersticos
corresponden a los esfuerzos principales y, los vectores caractersticos a las
direcciones asociadas a dichos esfuerzos. Para sistemas dinmicos lineales e
invariables con el tiempo, los valores caractersticos de la matriz A son las
frecuencias naturales de oscilacin del sistema y, los vectores caractersticos son
los modos de vibracin.
MatLab tiene los comandos eig y poly para la obtencin de los valores
caractersticos (races iguales o diferentes, reales o complejas) y vectores
caractersticos, as como para el polinomio caracterstico.
3. PROBLEMAS DE APLICACIN DE LOS SISTEMAS DE ECUACIONES LINEALES
EN INGENIERA.
Para resolver problemas en ingeniera que involucra sistemas de ecuaciones
lineales se recomienda tener en cuenta lo siguiente:
1. Entender el problema.
2. Determinar los datos conocidos.
3. Nombrar adecuadamente las incgnitas de acuerdo a lo que se pida.
4. Establecer las relaciones existentes entre los datos conocidos y las incgnitas.
5. Determinar el sistema de ecuaciones lineales asociado a las relaciones en 4.
6. Resolver el sistema de ecuaciones lineales resultante en 5.
7. Verificar que las respuestas obtenidas estn de acuerdo al problema.
8. Interpretar el resultado si es posible.
Problema 3.1. Un empresario tiene tres mquinas que son empleadas en la
fabricacin de cuatro artculos diferentes. Para utilizar plenamente las mquinas
estas estarn en operacin un turno de 8 horas diarias. El nmero de horas que
cada mquina es usada en la produccin de cada uno de los cuatro artculos est
dado por
Mquina Artculo 1 Artculo 2 Artculo 3 Artculo 4
1 1 2 1 2
2 2 0 1 1
3 1 2 3 0
Por ejemplo, en la produccin de una unidad del artculo 1 la mquina 1 se usa 1
hora, la mquina 2 se usa 2 horas y la mquina 3 se usa 1 hora. Encuentre el
nmero de unidades que se deben producir de cada uno de los 4 artculos un da
de 8 horas completas.
Solucin: Sea
el nmero de unidades que se deben producir del artculo
que se fabrican durante las 8 horas con = 1, 2, 3, 4.
1x
1
: Es la cantidad de horas diarias que es usada la mquina 1 en la fabricacin
del producto 1.
2x
2
: Es la cantidad de horas diarias que es usada la mquina 1 en la fabricacin
del producto 2.
1x
3
: Es la cantidad de horas diarias que es usada la mquina 1 en la fabricacin
del producto 3.
2x
4
: Es la cantidad de horas diarias que es usada la mquina 1 en la fabricacin
del producto 4.
Como la mquina 1 debe ser usada 8 horas diarias, entonces tenemos que:
1
1
+ 2
2
+ 1
3
+ 2
4
= 8
Procediendo de forma similar para las mquinas 2 y 3 obtenemos el sistemas de
ecuaciones lineales siguiente:
1
1
+ 2
2
+ 1
3
+ 2
4
= 8
2
1
+ 0
2
+ 1
3
+ 1
4
= 8
1
1
+ 2
2
+ 3
3
+ 0
4
= 8
Aplicando el mtodo de Gauss-Jordan y escribiendo las instrucciones en la
ventana de comandos de MatLab tenemos:
>> A=[1,2,1,2;2,0,1,1;1,2,3,0]; B=[8;8;8]; X=rref([A B])
X =
1 0 0 1 4
0 1 0 1 2
0 0 1 -1 0
Se tiene una solucin indeterminada, esto es:
1
+
4
= 4
2
+
4
= 2
3
4
= 0
de donde,
1
= 4
4
;
2
= 2
4
;
3
=
4
El modelo matemtico tiene infinidad de soluciones, sin embargo, el problema real
de produccin tiene soluciones finitas.
Cada
es no negativa por representar la cantidad de unidades fabricadas del
artculo cada da, por lo tanto
< 0 no tiene sentido.
Si asumimos que se produce un nmero completo de unidades, entonces
debe ser adems un nmero entero para que todos los
, sean no negativos,
debe ser un entero menor o igual que 2, y por lo tanto las posibles soluciones son
Solucin x
1
x
2
x
3
x
4
1 4 2 0 0
2 3 1 1 1
3 2 0 2 2
Por ejemplo la solucin 1 significa que en un da para las mquinas estar
completamente utilizadas se deben producir 4 unidades del artculo 1, 2 del
artculo 2 y ninguna de los artculos 3 y 4.
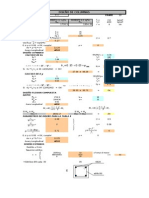
Problema 3.2. El circuito elctrico, mostrado en la figura 6, consiste en
resistencias y fuentes de voltaje. Determina la corriente de cada resistencia
usando las Leyes de Kirchhoff, si V
1
= 20; V
2
= 12; V
3
=40; R
1
= 18; R
2
=10; R
3
=
16; R
4
=6; R
5
= 15; R
6
= 8; R
7
= 12; R
8
= 14 (Gilat, 2005):
Figura 6. Circuito con cuatro mallas
Solucin:
Las Leyes de Kirchhoff (Ley de Nodos y Ley de Mallas) establecen que la suma de
voltajes alrededor de un circuito cerrado es cero. Una corriente se asigna para
cada malla. (i
1
, i
2
, i
3
, i
4
en la figura). Entonces, la Ley de Mallas de Kirchhoff se
aplica en cada malla, obteniendo un sistema de ecuaciones lineales para las
corrientes (en este caso cuatro ecuaciones). La solucin de este sistema nos da
los valores de las corrientes en las mallas. La corriente en una resistencia que
fluye en dos mallas es la suma de las corrientes en las correspondientes mallas.
Es conveniente asumir que todas las corrientes van en la misma direccin (sentido
de las manecillas del reloj en nuestro caso). En la ecuacin para cada malla, la
fuente de un voltaje es positiva si la corriente fluye hacia el polo negativo (-) y el
voltaje de la resistencia es negativo para corrientes en la direccin a la corriente
en la malla.
Las ecuaciones para las cuatro mallas son:
V
1
- R
1
i
1
- R
3
( i
1
- i
3
) R
2
( i
1
- i
2
) = 0
- R
5
i
2
- R
2
( i
2
- i
1
) R
4
( i
2
- i
3
) - R
7
( i
2
- i
4
) = 0
- V
2
- R
6
( i
3
- i
4
) R
4
( i
3
- i
2
) R
3
( i
3
- i
1
) = 0
V
3
- R
8
i
4
- R
7
( i
4
- i
2
) R
6
( i
4
- i
3
) = 0
Sustituyendo los datos, tenemos:
34
4
34I
3
8I
2
12I
12
4
8I
3
30I
2
6I
1
16I
0
4
12I
3
6I
2
43I
1
10I
20
3
16I
2
10I
1
44I
= +
= + +
= + +
= + +
Las cuatro ecuaciones pueden ser reescritas en forma matricial:
(
(
(
(
=
34 8 12 0
8 30 6 16
12 6 43 10
0 16 10 44
A
(
(
(
(
=
40
12
0
20
B
(6)
Usando el comando rref (Mtodo de Gauss-Jordan) para el sistema (6) tenemos:
>> A = [-44 10 16 0; 10 -43 6 12; 16 6 -30 8; 0 12 8 -34];
>> B = [-20; 0; 12; -40];
>> X = rref([A B])
X =
1.0000 0 0 0 0.8411
0 1.0000 0 0 0.7206
0 0 1.0000 0 0.6127
0 0 0 1.0000 1.5750
Los valores de las corrientes en cada malla son:
i
1
= 0.8411 A; i
2
= 0.7206 A; i
3
= 0.6127 A; i
4
= 1.5750 A
La corriente en la resistencia R
1
es i
1
= 0.8411 A
La corriente en la resistencia R
5
es i
2
= 0.7206 A
La corriente en la resistencia R
8
es i
4
= 1.5750 A
Para las siguientes resistencias, pertenecen a dos mallas a la vez, por tanto, sus
corrientes son la suma de las corrientes en las mallas respectivas.
La corriente en la resistencia R
2
es i
1
i
2
= 0.1205 A
La corriente en la resistencia R
3
es i
1
i
3
= 0.2284 A
La corriente en la resistencia R
4
es i
2
i
3
= 0.1079 A
La corriente en la resistencia R
6
es i
4
i
3
= 0.9623 A
La corriente en la resistencia R
7
es i
4
i
2
= 0.8544 A
Problema 3.3 La figura 7 muestra un circuito resistivo puro (Torres, 1990).
Empleando las leyes de Kirchhoff, obtenga el sistema de ecuaciones lineales en
las corrientes de las mallas I. Si las resistencias son 2 y las fuentes de voltaje
valen V
1
= V
2
=110 V y V
3
= V
4
= 220 V. Determinar las 4 corrientes de malla I.
Solucin:
Empleando las Leyes de Kirchhoff tenemos:
V
1
- V
2
= (I
1
- I
2
) R
3
+ ( I
1
- I
3
) R
4
+ I
1
( R
1
+ R
2
)
V
2
- V
3
= ( I
2
- I
1
) R
3
+ ( I
2
- I
3
) R
8
+ ( I
2
- I
4
) R + I
2
R
4
V
4
= ( I
3
- I
1
) R
4
+ ( I
3
- I
2
) R
8
+ ( I
3
- I
4
) R
7
+ I
3
( R
5
+
R
6
)
V
3
= ( I
4
- I
2
) R
10
+ (I
4
- I
3
) R
7
+ I
4
R
11
Figura 7. Circuito resistivo puro
Sustituyendo los datos, tenemos el siguiente sistema de ecuaciones lineales:
220 6 2 2
220 2 10 2 2
110 2 2 8 2
0 2 2 8
4 3 2
4 3 2 1
4 3 2 1
3 2 1
= +
= +
= +
=
I I I
I I I I
I I I I
I I I
(7)
Usando el comando rref (Mtodo de Gauss-Jordan) en el sistema (7) tenemos:
A = [8 -2 -2 0; -2 8 -2 -2; -2 -2 10 -2; 0 -2 -2 6]; B = [ 0; -110; 220; 220 ];
sol = rref([A B]) %Mtodo de Gauss-Jordan
sol =
1.0000 0 0 0 12.3841
0 1.0000 0 0 12.0199
0 0 1.0000 0 37.5165
0 0 0 1.0000 53.1788
Las corrientes son I
1
= 12.3841 A
I
2
= 12.0199 A
I
3
= 37.5165 A
I
4
= 53.1788 A
Problema 3.4. Tres mquinas limpiadoras A, B y C trabajando juntas realizan la
limpieza de unos grandes almacenes en 4 horas. Si se descompone la mquina B,
entonces A y C realizan el trabajo en 6 horas, pero si se descompone la mquina
C, entonces A y B lo realizan en 8 horas. Cunto tardar cada mquina
individualmente en realizar el trabajo de limpieza?
Solucin:
Reordenando los datos para tener una mejor perspectiva del problema, se tiene la
siguiente tabla:
Mquinas
trabajando
Tiempo limpieza
(hrs)
Limpieza en 1 hora
A,B y C juntas 4 1/4
A y C 6 1/6
A y B 8 1/8
Llamamos x, y, z al nmero de horas que tarda cada mquina individualmente en
hacer todo el trabajo.
Entonces, en 1 hora A limpiar 1/x del total; 1 hora B limpiara 1/y del total; 1 hora
C limpiar 1/z del total.
Por conveniencia hacemos un cambio de variables, X = 1/x, Y = 1/y, Z =1/z.
Entonces:
8 / 1
6 / 1
4 / 1
= +
= +
= + +
y x
z x
z y x
(8)
Escribiendo las instrucciones en la ventana de comandos y usando el operador \
(Mtodo de eliminacin de Gauss) del sistema (8) tenemos:
>> A = [1 1 1; 1 0 1; 1 1 0] ;
>> B = [1/4; 1/6; 1/8] ;
>> sol = A\B
sol = 0.0417 0.0833 0.1250
Haciendo cambio de variable, la solucin es:
>> x = 1./sol
x =
24.0000 12.0000 8.0000
Mmquina A=24 horas; B =12 horas; C =8 horas.
Problema 3.5. Empleando las leyes de Kirchhoff, se obtuvieron las siguientes
ecuaciones lineales para el circuito mostrado en la figura 8 (Torres, 1990):
Figura 8 Circuito elctrico de ramas
(9)
0
0
0
0
0
0
0
0
0
9 9 7 7 6 6
6 6 3 3 5 5
8 8 5 5 4 4
3 3 2 2 1 1
9 6 5 8
7 6 3 2
2 1
3 1 5 4
4 8
= +
= +
= +
= +
=
= + + +
=
= + +
=
i R i R i R
i R i R i R
i R i R i R
i R i R i R
i i i i I
i i i I i
I i i
i i I i i
I i i
C
B
B
A
A
Donde: i son las corrientes de rama, I las corrientes de las fuentes y R los valores
de las resistencias.
Si el valor de las fuentes es A I A I A I
C B A
4 , 6 , 2 = = = y el de las resistencias
O = = 2
2 1
R R ; ; 3
8 4
O = = R R ; 5
6 5
O = = R R ; 4
9 7
O = = R R O = 6
3
R .
Obtener las nueve corrientes de rama por el mtodo de eliminacin de Gauss.
Solucin:
Sustituyendo los datos en el sistema (8) tenemos:
0 4 4 5
0 5 5 6
0 3 5 3
0 6 2 2
4
6
6
2
2
9 7 6
6 5 3
8 5 4
3 2 1
9 8 6 5
7 6 3 2
2 1
5 4 3 1
8 4
= +
= +
= +
= +
=
= + +
=
= + +
= +
i i i
i i i
i i i
i i i
i i i i
i i i i
i i
i i i i
i i
(9)
Escribiendo el sistema (9) en forma matricial tenemos:
(
(
(
(
(
(
(
(
(
(
(
(
=
4 0 4 5 0 0 0 0 0
0 0 0 5 5 0 6 0 0
0 3 0 0 5 3 0 0 0
0 0 0 0 0 0 6 2 2
1 1 0 1 1 0 0 0 0
0 0 1 1 0 0 1 1 0
0 0 0 0 0 0 0 1 1
0 0 0 0 1 1 1 0 1
0 1 0 0 0 1 0 0 0
A
(
(
(
(
(
(
(
(
(
(
(
(
=
0
0
0
0
4
6
6
2
2
B
(10)
Escribiendo los datos del sistema (10) y usando el comando \ (Mtodo de
eliminacin de Gauss) tenemos:
>> A = [0 0 0 -1 0 0 0 1 0; -1 0 -1 1 1 0 0 0 0;
1 -1 0 0 0 0 0 0 0; 0 1 1 0 0 1 -1 0 0;
0 0 0 0 -1 -1 0 -1 -1; 2 2 -6 0 0 0 0 0 0;
0 0 0 3 -5 0 0 3 0; 0 0 6 0 5 -5 0 0 0;
0 0 0 0 0 5 4 0 -4];
>> B = [2; -2; 6; -6; -4; 0; 0; 0; 0];
>> corrientes_i = A\B
corrientes_i =
2.3761
-3.6239
-0.4160
-0.5636
0.5237
0.0245
1.9847
1.4364
2.0153
Las corrientes de rama son:
A i A i A i A i
A i A i A i A i A i
0153 . 2 ; 4364 . 1 ; 9847 . 1 ; 0245 . 0
; 5237 . 0 ; 5636 . 0 ; 4160 . 0 ; 6239 . 3 ; 3761 . 2
9 8 7 6
5 4 3 2 1
= = = =
= = = = =
Problema 3.5. Si la frecuencia de oscilacin de una mquina coincide con la
frecuencia natural de oscilacin de la estructura sobre la que est montada, la
estructura entra en resonancia y puede colapsar. Esto es anlogo a un columpio:
el columpio se balancea a cierta frecuencia (natural) y cada vez que llega a un
extremo le damos un empujn (frecuencia excitadora que coincide con la
frecuencia natural), cada vez adquirir mayor amplitud. Una estructura
movindose cada vez con mayor amplitud puede daarse.
Las frecuencias naturales de oscilacin w
i
de cierta estructura son las races de
los valores caractersticos
i
de la siguiente matriz:
(
(
(
(
6 0 0 0
0 4 0 0
0 0 5 1
0 0 1 5
(11)
Determinar si las frecuencias naturales de oscilacin de la estructura son menores
que la frecuencia de oscilacin de 50 ciclos/s de una mquina montada sobre ella.
Solucin:
Escribiendo las instrucciones del sistema matricial (11) tenemos:
>> A = [-5 1 0 0; 1 -5 0 0; 0 0 -4 0; 0 0 0 -6];
>> frecuencias = eig(A)
frecuencias =
-6 -6 -4 -4
Las frecuencias naturales de oscilacin son menores de 50 ciclos/s
Problema 3.7. Considere el sistema de tres pndulos de masa m sujetos a dos
resortes de constante k, a media altura de los pndulos de longitud 2a como se
muestra en la figura 3.10. Los resortes no tienen esfuerzo cuando los pndulos
estn en posicin vertical.
Figura 3.10 Sistema de pndulos acoplados
Las frecuencias naturales de oscilacin w
i
del sistema estn relacionados por
i
=
4ma
2
w
i
2
a los valores caractersticos
i
de la matriz:
(
(
(
+
+
+
2 2
2 2 2
2 2
2 0
2 2
0 2
ka mag ka
ka ka mag ka
ka ka mag
Los modos de vibracin natural del sistema son los vectores caractersticos
correspondientes. Determina los valores y vectores caractersticos de la matriz
simtrica, si mag = 2 y ka
2
= 1.
Solucin:
Sustituyendo los datos se obtiene la siguiente matriz:
(
(
(
=
5 1 0
1 6 1
0 1 5
A
(12)
Escribiendo los datos del sistema matricial (12) tenemos:
>> A= [5 -1 0; -1 6 -1; 0 -1 5]; Y = poly(A)
Y =
1.0000 -16.0000 83.0000 -140.0000
0 140 83 16
2 3
= +
>> val = eig(A)
val =
4.0000
5.0000 Valores caractersticos
7.0000
>> [V,D] = eig(A)
V =
-0.5774 -0.7071 0.4082
-0.5774 0.0000 -0.8165 Vectores caractersticos
-0.5774 0.7071 0.4082
D =
4.0000 0 0
0 5.0000 0 Valores caractersticos
0 0 7.0000
Para una frecuencia mnima = 4, el sistema de los tres pndulos tiene un
movimiento de vaivn uniforme semejante al pndulo de un reloj. Para la
frecuencia = 5, el pndulo de en medio est en reposo y los otros dos se
mueven a los lados. Para la frecuencia mxima = 7, los pndulos tienen
movimientos totalmente irregulares y significa que el sistema est a punto de
colapsar.
Problema 3.8 Considrese un valle aislado con N
1
(t) linces que se alimentan
exclusivamente de liebres, de los cules hay un nmero N
2
(t) como se muestra en
la figura 11 (Torres, 1990).
Figura 11 Sistema ecolgico presa-depredador
La tasa de cambio en el nmero de predadores (linces) es proporcional a su
cambio natural (debido a natalidad y mortalidad), as como a la cantidad de
comida disponible (nmero de liebres). Esta relacin se puede expresar
matemticamente como:
2 1
1
N b N a
dt
dN
+ =
Donde: a y b son constantes. Asimismo, la tasa de cambio de las liebres se puede
escribir como:
2 1
2
N d N c
dt
dN
+ =
Donde: c y d son constantes. Este sistema de ecuaciones se puede escribir en
forma matricial como:
(
=
(
2
1
2
1
N
N
d c
b a
N
N
dt
d
La solucin de este sistema de ecuaciones diferenciales es de la forma:
t t
e x c e x c
t N
t N
2 1
2 2 1 1
2
1
) (
) (
+ =
(
Donde:
1
y
2
son los valores caractersticos correspondientes a los vectores
caractersticos X
1
y X
2
de la matriz y C
1
y C
2
son constantes que dependen de las
condiciones iniciales.
Obtener los valores caractersticos para las siguientes matrices de coeficientes:
(
=
1 2
5 6
A
(
=
1 2
5 6
B
(
=
1 2
5 5
C
(12)
Solucin:
Escribiendo los datos en la ventana de comandos de MatLab del sistema de
matrices (12), tenemos:
>> A = [6 5; -2 -1];
>> valores_caracteristicos = eig(A)
valores_caracteristicos =
4
1
>> B = [-6 5; -2 1];
>> valores_caracteristicos = eig(B)
valores_caracteristicos =
-4
-1
>> C = [-5 5; -2 1];
>> valores_caracteristicos = eig(C)
valores_caracteristicos =
-2.0000 + 1.0000i
-2.0000 - 1.0000i
De la solucin se observa que si ambos valores caractersticos
1
y
2
son
positivos, el sistema ecolgico explota pues las exponenciales tienden a infinito. Si
ambos valores caractersticos son negativos, las poblaciones se exterminan
(decrecen a cero). Si los valores caractersticos son complejos conjugados, las
poblaciones oscilan pues ) cos (
) (
bt sen i bt e e
t a t b i a
+ =
+
.
Problema 3.9 Considere un sistema de cinco discos, cada uno de momento de
inercia j, unidos a una flecha de constante elstica torsional k, como se muestra en
la figura 12.
Figura 12 Discos unidos por una flecha
Determinar las frecuencias naturales de oscilacin torsional
i
, relacionadas por
i
=
i
2
j/k con los valores caractersticos
i
de la matriz simtrica:
(
(
(
(
(
(
1 1 0 0 0
1 2 1 0 0
0 1 2 1 0
0 0 1 2 1
0 0 0 1 1
(13)
As como calcular los modos de vibracin torsional (vectores caractersticos de la
matriz). Considerar j=3kg-m
2
y k=2 rad/N-m.
Solucin:
Escribiendo los datos del sistema matricial (13), tenemos:
>> A = [1 -1 0 0 0; -1 2 -1 0 0; 0 -1 2 -1 0; 0 0 -1 2 -1; 0 0 0 -1 -1];
>> [V,D] = eig(A)
V =
-0.0155 -0.6852 0.5670 0.4051 0.2115
-0.0362 -0.5826 -0.0752 -0.5971 -0.5450
-0.1052 -0.3929 -0.6323 -0.1220 0.6480 Vectores caractersticos
-0.3143 -0.1445 -0.4732 0.6549 -0.4770
-0.9426 0.1257 0.2219 -0.1885 0.1042
D =
-1.3335 0 0 0 0
0 0.1496 0 0 0
0 0 1.1327 0 0 Valores caractersticos
0 0 0 2.4741 0
0 0 0 0 3.5771
Nota: Los valores y vectores caractersticos, nos indican que la oscilacin de los discos
no es uniforme y tienden al cabeceo.
Problema 3.9 En una armadura estticamente determinada con nudos articulados
(Fig.13), la tensin
en cada miembro, puede obtenerse a partir de la ecuacin
matricial que se presenta enseguida (la ecuacin resulta de poner todas las sumas
de fuerzas, actuando horizontal o verticalmente en cada nudo igual a cero).
Obtenga los valores de las tensiones de la armadura (Curtis, 1987).
Figura 13 Armadura con nudos articulados
(
(
(
(
(
(
(
(
(
(
(
(
7071 . 0 1 0 0 0 0 0 0 0
0 0 1 0 5 . 0 0 0 0 0
0 1 0 1 8660 . 0 0 0 0 0
7071 . 0 0 0 0 0 1 0 0 0
7071 . 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0
0 0 0 1 0 0 0 1 0
0 0 0 0 5 . 0 0 1 0 7071 . 0
0 0 0 0 8660 . 0 1 0 0 7071 . 0
F=
(
(
(
(
(
(
(
(
(
(
(
(
0
500
0
0
500
0
0
1000
0
(14)
Solucin:
Escribiendo las instrucciones en la Ventana de comandos de MatLab del sistema
matricial (14) tenemos:
>> A = [0.7071 0 0 -1 -0.8660 0 0 0 0
0.7171 0 1 0 0.5 0 0 0 0
0 1 0 0 0 -1 0 0 0
0 0 -1 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0.7071
0 0 0 1 0 0 0 0 -0.7071
0 0 0 0 0.8660 1 0 -1 0
0 0 0 0 -0.5 0 -1 0 0
0 0 0 0 0 0 0 1 0.7071];
> B = [ 0; -1000; 0; 0; 500; 0; 0; -500];
>> X = A\B
X =
1.0E+003 *
-1.0247 0.7245 0 -0.2652 -0.5304 0.7245 0.2652 0.2652 -0.3741
Las tensiones son:
4 . 530
2 . 265
0
5 . 724
7 . 1024
5
4
3
2
1
=
=
=
=
=
F
F
F
F
F
1 . 374
2 . 265
2 . 265
5 . 724
9
8
7
6
=
=
=
=
F
F
F
F
Nota: Los valores negativos son comprensin y los positivos son estiramiento.
CONCLUSIN.
La aplicacin de los mtodos de solucin numrica para sistemas de ecuaciones
lineales mediante el software de aplicacin MATLAB, les facilitar a los alumnos
de ingeniera la mejor comprensin de estos sistemas y de los procesos
matemticos. Tambin permite una participacin constructivista por parte del
alumno, ya que puede conjeturar, experimentar y extraer conclusiones. MatLab es
un potente recurso matemtico que acompaar siempre al alumno en su proceso
de aprendizaje, ya que con mnimos conocimientos informticos ofrece toda una
gama de posibilidades para resolver los problemas de Mtodos Numricos, dando
como resultado un mejor aprendizaje.
BIBLIOGRAFA
Etter, D. (1997). Solucin de Problemas de Ingeniera con MatLab. (2 ed.),
Mxico, Ed. Prentice Hall Hispanoamericana.
Gerald, C y Wheatley, P. (2000). Anlisis Numrico con Aplicaciones. (6 ed.),
Mxico, Ed. Prentice Hall/Pearson Educacin.
Gilat, A. (2006). MatLab an introduction with applications. (2 ed.),USA, Ed. John
Wiley & Sons, Inc.
The MathWorks, Inc (2009) MATLAB Function Reference R2009a. USA.
Mathews, J. H. y FINK, K.D.(2000). Mtodos numricos con MatLab. (3 ed.),
Espaa, Ed. Prentice-Hall Hispanoamericana.
Nieves, A. y Dominguez, S. (2002). Mtodos Numricos. Aplicados a la ingeniera.
(2 ed.). Mxico, CECSA.
Prez, L. C. (2002). Matlab y sus aplicaciones en las Ciencias y la Ingeniera.
Espaa, Ed. Prentice-Hall.
Torres, J. y Czitrom, V. (1980) Mtodos para la solucin de problemas con
computadora digital. Mxico, Representaciones y Servicios de Ingeniera.
Yang, W., Cao W, Chung T. and Morris, J.(2005). Applied Numerical Methods
Using MATLAB. USA; Ed. Wiley-Interscience.
SNTESIS CURRICULAR
Nombre: Ing. Luis Lorenzo Jimnez Garca.
e-mail: jimenezg@att.net.mx
Tel. (55) 56230810 Ext. 39313
Grado acadmico: Ingeniero Civil.
Estudios realizados: Posgrado en Maestra en Pedagoga (100% de crditos
aprobados). Diplomado en docencia universitaria. FES Aragn. UNAM.
Reconocimientos otorgados:
- Reconocimiento a mi labor acadmica con el cambio de categora de Profesor de
Carrera
Asociado B Tiempo Completo Interino a Profesor de Carrera Asociado C Tiempo
Completo
Definitivo. FES Aragn. 18 de Marzo de 2010.
- Reconocimiento por 30 aos de Servicios Acadmicos. F.E.S. Aragn. UNAM
- Reconocimiento a mi labor acadmica con ingreso al Programa de Apoyo a la
Incorporacin del Personal Acadmico de Tiempo Completo (PAIPA).
- Reconocimiento al Mrito Universitario. Diploma y medalla por los 25 aos de
Servicios Acadmicos. F.E.S. Aragn. UNAM.
- Distincin al Profesor de Asignatura Nivel 2. E.N.E.P. Aragn. UNAM.
- Profesor Fundador de la carrera de Ingeniera en Computacin. E.N.E.P.
Aragn.UNAM.
- Reconocimiento por destacada vocacin al servicio. Secretara de Desarrollo Urbano y
Ecologa. Mxico, D.F.
Cursos impartidos:
- El software de aplicacin MatLab en la solucin de problemas de Ingeniera. Curso
Intersemestral de la Carrera de Ingeniera Mecnica Elctrica. F.E.S. Aragn. (20
horas). 2 al 6 de Agosto de 2010.
- El MatLab aplicado a la Ingeniera. Curso Intersemestral de la Carrera de Ingeniera
Mecnica Elctrica. F.E.S. Aragn. (20 horas). 22 al 29 de Enero de 2010.
- Resolucin de Problemas con MatLab. 2 Diplomado de Actualizacin en
Matemticas. DGAPA-Divisin de la Ciencias Fsico Matemticas y las Ingenieras.
FES Aragn. (25 horas) Septiembre 2009.
- MatLab y sus Aplicaciones en la Ingeniera. Curso Intersemestral de la Carrera de
Ingeniera
Mecnica Elctrica. . F.E.S. Aragn (Febrero 2009).
- Didctica de las Matemticas. Diplomado de Actualizacin en Matemticas. FES
Aragn. Direccin General de Asuntos del Personal Acadmico. (Septiembre 2008).
- Aplicacin de MatLab en las Ciencias Fsicomatemticas. Unidad de Sistemas y
Servicios de Cmputo. F.E.S. Aragn. (Agosto 2008)
- MatLab y su aplicacin en Ingeniera. Unidad de Sistemas y Servicios de Cmputo.
F.E.S. Aragn. (Agosto 2008)
- Mtodos Numricos aplicados con MatLab. Unidad de Sistemas y Servicios de
Cmputo. F.E.S. Aragn. (Agosto 2008)
- MatLab. Unidad de Sistemas y Servicios de Cmputo. F.E.S. Aragn. (Agosto 2008)
- El MatLab y las aplicaciones en Matemticas. Curso Intersemestral de la Carrera de
Ingeniera Mecnica Elctrica. F.E.S. Aragn (2008).
- MatLab y su aplicacin en Ingeniera. Unidad de Sistemas y Servicios de Cmputo.
F.E.S. Aragn. (Agosto 2008)
- MatLab. Unidad de Sistemas y Servicios de Cmputo. F.E.S. Aragn. (Agosto 2007)
- Aplicacin de MatLab a las Ciencias Fsicomatemticas y la Ingeniera. Curso
Intersemestral de la Carrera de Ingeniera Mecnica Elctrica. F.E.S. Aragn (2007).
- MatLab aplicado al Clculo Integral. Curso Intersemestral de la Carrera de Ingeniera
Mecnica Elctrica. F.E.S. Aragn (2007)
- MatLab. Unidad de Sistemas y Servicios de Cmputo. F.E.S. Aragn. (2007)
- Aplicaciones de MatLab a la Ingeniera. Curso Intersemestral de la Carrera de
Ingeniera Mecnica Elctrica. . F.E.S. Aragn (2006).
Publicaciones electrnicas:
- La enseanza-aprendizaje de los Mtodos Numricos con Matlab. Publicacin
Electrnica. 2 Encuentro Internacional sobre la enseanza de las Matemticas. FES
Cuautitln. Mayo de 2010.
- Aplicacin de la Integracin Numrica en Ingeniera mediante MatLab. Publicacin
Electrnica. Nmero de ISBN: 978-607-02-1090-7. VI Encuentro Multidisciplinario de
Investigacin. FES Aragn. UNAM (2009).
- El Software didctico MatLab aplicado a los Mtodos Numricos. Caso: Solucin
Numrica de Ecuaciones en Derivadas Parciales. V Encuentro Multidisciplinario de
Investigacin. FES Aragn (2008).
- El software didctico MatLab aplicado a los Mtodos Numricos en Ingeniera. IV
Encuentro Multidisciplinario de Investigacin. F.E.S. Aragn (2007).
Cursos tomados:
- Autocad en 2D y 3D para Ingeniera. Curso Intersemestral de la Carrera de
Ingeniera Mecnica Elctrica. F.E.S. Aragn. (20 horas). 14 al 23 de Junio de 2010.
- Formacin docente y calidad del proceso formativo. Divisin de Estudios de
Posgrado e Investigacin. FES Aragn. 7 al 20 de Junio de 2010.
- Creatividad aplicada a la enseanza universitaria. Divisin de Estudios de Posgrado
e Investigacin. FES Aragn. 11 al 24 de Mayo de 2010.
- Didctica de las matemticas (Aprendizaje convencional vs Competencia
matemtica). Direccin General de Asuntos del Personal Acadmico. 12 al 22 de
Enero de 2010
- Usos y apropiaciones de la Investigacin Comparada. Direccin General de
Asuntos del Personal Acadmico. 11 al 15 de Enero de 2010
- 3er. Diplomado en Cmputo para Profesores de Licenciatura UNAM. Introduccin a la
Tecnologa Informtica. Centro de Cmputo. FES Aragn. (150 horas). (2009).
- Mtodos Numricos con Mathematica. Mdulo 4 del 2. Diplomado en Matemticas.
Divisin de las Ciencias Fsico Matemticas y las Ingenieras. FES Aragn (Junio
2009).
- La Geometra Analtica en 2D y 3D en la Ingeniera. Mdulo 3 del 2. Diplomado en
Matemticas. Divisin de las Ciencias Fsico Matemticas y las Ingenieras. FES
Aragn (Junio 2009).
- lgebra, Conjuntos y lgebra lineal. Mdulo 2 del 2. Diplomado en Matemticas.
Divisin de las Ciencias Fsico Matemticas y las Ingenieras. FES Aragn (Mayo
2009).
- Historia de las Matemticas y su Desarrollo. Mdulo 1 del 2. Diplomado en
Matemticas. Divisin de las Ciencias Fsico Matemticas y las Ingenieras. FES
Aragn (Marzo 2009).
- Herramientas de cmputo. Mdulo 5 del Diplomado en Matemticas. Divisin de las
Ciencias Fsico Matemticas y las Ingenieras. FES Aragn (2008).
- Pensamiento matemtico avanzado. Mdulo 4 del Diplomado en Matemticas.
Divisin de las Ciencias Fsico Matemticas y las Ingenieras. FES Aragn (2008).
- Sistema de cambio variacional. Mdulo 3 del Diplomado en Matemticas. Divisin de
las Ciencias Fsico Matemticas y las Ingenieras. FES Aragn (2008).
- Pensamiento funcional, visualizacin y percepcin espacial. Mdulo 2 del Diplomado
en Matemticas. Divisin de las Ciencias Fsico Matemticas y las Ingenieras. FES
Aragn (2008).
- 1er Taller, estrategias de la investigacin de campo. Curso Intersemestral de la
Secretara Acadmica del Programa de Investigacin. F.E.S. Aragn (2008).
- Anlisis de proyectos educativos. Curso Intersemestral de la Divisin de Estudios de
Posgrado. F.E.S. Aragn (2008).
- Formacin de tutores para el fortalecimiento de los estudios de licenciatura en la FES
Aragn. Curso de la Divisin de Humanidades y Artes. F.E.S. Aragn (2008).
- Aplicaciones de la energa renovable en el sector agropecuario. Curso de la UACh.
(2007)
- Formulacin, elaboracin y presentacin de Tesis de Grado. Divisin de Estudios de
Posgrado e Investigacin. F.E.S. Aragn (2007).
- Curso Bsico de Sismologa. Curso de la Secretara Acadmica del Programa de
Investigacin. F.E.S. Aragn. (2007)
- Metodologa de la Investigacin I. Curso Intersemestral de la Secretara Acadmica
del Programa de Investigacin. F.E.S. Aragn (2007).
- El dibujo asistido por computadora aplicado a la Ingeniera Mecnica Elctrica. Curso
Intersemestral de la Carrera de Ingeniera Mecnica Elctrica. F.E.S. Aragn (2007).
Conferencias Impartidas.
- La enseanza-aprendizaje de los Mtodos Numricos con Matlab. 2 Encuentro
Internacional sobre la enseanza de las Matemticas. FES Cuautitln. Mayo de 2010.
- Aplicacin de la Integracin Numrica en Ingeniera mediante MatLab. VI Encuentro
Multidisciplinario de Investigacin. FES Aragn. Octubre 2009.
- Tcnicas de Aprendizaje. Conferencia impartida en la Escuela Preparatoria Oficial
No. 52. Actividades referentes a la 16 Semana Nacional de Ciencia y Tecnologa.
Parque Residencial Coacalco. Coacalco, Edo. deMxico.(2009).
- Nuevas Tecnologas para la Enseanza de las Matemticas. Conferencia impartida
en la Escuela Preparatoria Oficial No. 3. Actividades referentes a la 16 Semana
Nacional de Ciencia y Tecnologa. Nezahualcyotl, Edo. de Mxico (2009).
- Mtodos Activos de Aprendizaje. Conferencia impartida en el CECYTEM Ecatepec.
Actividades referentes a la 15 Semana Nal. de Ciencia y Tecnologa. (Octubre 2008).
- Nuevas Tecnologas para la Enseanza de las Matemticas. Conferencia impartida
en el CECYTEM Ecatepec. Actividades referentes a la 15 Semana Nacional de
Ciencia y Tecnologa (Octubre 2008).
- El Software didctico MatLab aplicado a los Mtodos Numricos. Caso: Solucin
Numrica de Ecuaciones en Derivadas Parciales. V Encuentro Multidisciplinario de
Investigacin. FES Aragn (2008).
- Mtodos Activos de Aprendizaje. (Turno matutino y Turno Vespertino). Escuela
Preparatoria Oficial No. 3. 14 Semana Nacional de Ciencia y Tecnologa.
Nezahualcyotl, Edo. de Mxico (2007).
- Las nuevas tecnologas en la enseanza de las matemticas. (Turno matutino y
Turno Vespertino). Escuela Preparatoria Oficial No. 3. 14. Semana Nacional de
Ciencia y Tecnologa. Nezahualcyotl, Edo. de Mxico (2007).
- El software didctico MatLab aplicado a los Mtodos Numricos en Ingeniera. IV
Encuentro Multidisciplinario de Investigacin. F.E.S. Aragn (2007).
- Mtodos Activos de Aprendizaje. Escuela Preparatoria Alfredo Herrera Nava. 13.
Semana Nacional de Ciencia y Tecnologa. Nezahualcyotl, Edo. de Mxico (2006).
- Contaminacin. Divulgacin de Temas y Tpicos Universitarios. Televisa Canales 5 y
8. Mxico, D.F. (1984).
- Contaminacin. Divulgacin de Temas y Tpicos Universitarios. Televisa Canales 5 y
8. Mxico, D.F. (1984).
- El Ruido en la Ciudad. Divulgacin de Temas y Tpicos Universitarios. Televisa
Canales 5 y 8 Mxico, D.F. (1984).
- El Ruido en Centro de Trabajo. Divulgacin de Temas y Tpicos Universitarios.
Televisa Canales 5 y 8 . Mxico, D.F. (1984).
- Los Efectos Ocasionados por el Ruido. Divulgacin de Temas y Tpicos
Universitarios. Televisa Canales 5 y 8 . Mxico, D.F. (1984).
- Control de Ruido Industrial. Divulgacin de Temas y Tpicos Universitarios. Televisa
Canales 5 y 8 . Mxico, D.F. (1982).
- Ruido Urbano. Divulgacin de Temas y Tpicos Universitarios. Televisa Canales 5 y
8 (1982).
- El Ruido produce Neurosis?. Divulgacin de Temas y Tpicos Universitarios.
Televisa Canales 5 y 8 (1982). Mxico, D.F. (1982).
- Contaminacin Ambiental por Ruido. Divulgacin de Temas y Tpicos Universitarios.
Televisa Canales 5 y 8 . Mxico, D.F. (1981).
Actividad docente e institucional.
- Funcionario de casilla. Elecciones de consejeros alumnos al H-Consejo Tcnico
(2008).
- Participacin en el proceso de Acreditacin de las Licenciaturas de Ingeniera Civil e
Ingeniera Mecnica Elctrica ante el CACEI. F.E.S. Aragn. UNAM (2006).
- Se han dirigido y revisado diversas tesis y se ha participado en exmenes
profesionales.
- Miembro del Comit de Carrera de Carrera de Ingeniera Mecnica Elctrica en el
rea de Fsico Matemticas (2006- ).
- Tutor de diversos alumnos del Programa de Becas Pronabes. Carrera: Ingeniera
Mecnica Elctrica. F.E.S. Aragn. UNAM. (2006- ).
- Jurado de exmenes de oposicin en las asignaturas Mtodos Numricos, Mtodos
Numricos I y Mtodos Numricos II, de las carreras de Ingeniera Civil, Actuara y
Matemticas Aplicadas y Computacin. F.E.S. Acatln. UNAM. (2006).
- Presidente de la Comisin Dictaminadora Interna. F.E.S. Aragn. UNAM (1998-2006)
- Miembro de la Comisin Dictaminadora de Diseo y Ciencias Bsicas. ENEP Aragn.
UNAM (1994-1996).
- Representante del C. Director de la ENEP Aragn ante el Consejo Acadmico de rea
de las Ciencias Fsico-Matemticas y de las Ingenieras. (1993-1997).
- Miembro de la Comisin de Honor y Justicia. E.N.E.P. Aragn UNAM.(1993-1997).
- Miembro de la Comisin de Seguridad. E.N.E.P. Aragn. UNAM (1990-1993)
- Decano del Comit de Carrera de Ingeniera en Computacin. ENEP Aragn. (1991-)
- Consejero Tcnico Propietario de la Carrera de Ingeniera en Computacin. (1987-
1993)
Вам также может понравиться
- Apuntes de CostosДокумент171 страницаApuntes de CostosGabriel GuardiaОценок пока нет
- Covenin 1753-1-2005 Estructura de Concreto Armado en Edificaciones ArticuladoДокумент183 страницыCovenin 1753-1-2005 Estructura de Concreto Armado en Edificaciones ArticuladoMoganna GowdaОценок пока нет
- Vibraciones - Mecanicas Lab de Tecnologia de MaterialesДокумент104 страницыVibraciones - Mecanicas Lab de Tecnologia de MaterialesrosesalexОценок пока нет
- Manual Microsoft Project 2003 2007 2010 Aplicado A La ConstruccionДокумент0 страницManual Microsoft Project 2003 2007 2010 Aplicado A La ConstruccionRudi Maslucan del CastilloОценок пока нет
- Concreto Armado II - Juan Ortega GarciaДокумент200 страницConcreto Armado II - Juan Ortega GarciaElard Anibal Mamani Marca86% (14)
- Seguimiento Con ProjectДокумент3 страницыSeguimiento Con ProjectHenry ValverdeОценок пока нет
- Efectos de La Corrosion en Elementos de Hormigon PretensadoДокумент10 страницEfectos de La Corrosion en Elementos de Hormigon PretensadoHenry ValverdeОценок пока нет
- Cap 1 DaestlДокумент24 страницыCap 1 Daestlsintoros1Оценок пока нет
- Seguimiento Con ProjectДокумент3 страницыSeguimiento Con ProjectHenry ValverdeОценок пока нет
- Mohamed Mehdi HadiДокумент53 страницыMohamed Mehdi HadiHenry Valverde88% (8)
- Análisis Sísmico de Reservorios LlasaДокумент8 страницAnálisis Sísmico de Reservorios LlasaJohnny Condori Uribe100% (1)
- El ABC de Las Instalaciones Eléctricas ResidencialesДокумент121 страницаEl ABC de Las Instalaciones Eléctricas ResidencialesHugo GallegosОценок пока нет
- Aci Columnas CuadradasДокумент34 страницыAci Columnas CuadradasHenry Valverde100% (2)
- Diseño F'C 210 YanamanchaДокумент9 страницDiseño F'C 210 YanamanchaHenry ValverdeОценок пока нет
- CramerДокумент33 страницыCramerMiguel Angel ValleОценок пока нет
- Reporte de Video de Cómo Se Resuelve El Sistema de Ecuaciones de 3x3Документ4 страницыReporte de Video de Cómo Se Resuelve El Sistema de Ecuaciones de 3x3FĕʀńãȵðồОценок пока нет
- Plan Pizarra 8 OrigalДокумент64 страницыPlan Pizarra 8 OrigalFLORENTIN LAZOОценок пока нет
- Sistemas de Ecuaciones 2x2 SustituciónДокумент20 страницSistemas de Ecuaciones 2x2 SustituciónVictor Hugo Zamora Perez100% (2)
- Sistemas de Ecuaciones LinealesДокумент33 страницыSistemas de Ecuaciones LinealesLeslie SanchezОценок пока нет
- GUÍAS 5 Matematicas Grado 9ºДокумент9 страницGUÍAS 5 Matematicas Grado 9ºHasbleidyGonzalezОценок пока нет
- Tarea 2 Sistema de Ecuaciones LinealesДокумент13 страницTarea 2 Sistema de Ecuaciones LinealesJuanОценок пока нет
- Cuadro Comparativo MetoДокумент8 страницCuadro Comparativo MetoHiram Jimenez Espinosa50% (4)
- GUIA DE RAZONAMIENTO No 7 - de IngenieríaДокумент4 страницыGUIA DE RAZONAMIENTO No 7 - de Ingenieríaaldo severichОценок пока нет
- 13-Método de Igualación y CramerДокумент23 страницы13-Método de Igualación y CramerxLeonardoGv 23Оценок пока нет
- Manual de La Unidad 1 PDFДокумент19 страницManual de La Unidad 1 PDFAlonso RojasОценок пока нет
- 2 Examenes 2º BachilleratoДокумент485 страниц2 Examenes 2º BachilleratoAndreu Fuster100% (1)
- T2.2 No Linealidades y Linealización1213Документ31 страницаT2.2 No Linealidades y Linealización1213teresa alvarez alvarezОценок пока нет
- Guia 1 - Sistemas de EcuacionesДокумент12 страницGuia 1 - Sistemas de EcuacionesJuan Pablo Martìnez HerreraОценок пока нет
- Actividad 1 1er Corte - Algebra LinealДокумент34 страницыActividad 1 1er Corte - Algebra LinealKevin Yadir MARTINEZ RAMONОценок пока нет
- Cuandro Comparativo - Algebra Lineal - Grupo 5Документ11 страницCuandro Comparativo - Algebra Lineal - Grupo 5Anguie Zarin ACOSTA JAIMESОценок пока нет
- Segundo Parcial Examen Algebra LinealДокумент2 страницыSegundo Parcial Examen Algebra LinealOrange JM BEОценок пока нет
- Unidad 3 AlgebraДокумент28 страницUnidad 3 AlgebraEdgar KurtОценок пока нет
- MAT - U6 - 3er Grado - Sesion 12Документ5 страницMAT - U6 - 3er Grado - Sesion 12Gladys Maria Quiroz TorrealvaОценок пока нет
- Sistemas No LinealesДокумент7 страницSistemas No LinealesAnonymous s9W7lVrОценок пока нет
- ACTIVIDAD 3, Sistemas de Ecuaciones LinealesДокумент7 страницACTIVIDAD 3, Sistemas de Ecuaciones LinealesLucho Rincon BotelloОценок пока нет
- Two Equations Sys Sol - 01 Equal EA2022Документ29 страницTwo Equations Sys Sol - 01 Equal EA2022Edgar MataОценок пока нет
- Evaluacion de Competencias 1-4Документ2 страницыEvaluacion de Competencias 1-4Francisco Leonel Pérez - FADYОценок пока нет
- FICH1Документ3 страницыFICH1YACZON MORENO AGUIDOОценок пока нет
- Selectividad CCCSS2Документ399 страницSelectividad CCCSS2Jose Manuel Tejera GonzalvezОценок пока нет
- Cuadernillo Matematica Tercero 2024Документ39 страницCuadernillo Matematica Tercero 2024mgabys18Оценок пока нет
- Carpeta de EvidenciaДокумент8 страницCarpeta de EvidenciaQkriiz ArriolaОценок пока нет
- Prueba Transición de Matemáticas en PDFДокумент22 страницыPrueba Transición de Matemáticas en PDFBenjaminОценок пока нет
- Matematica 2 EcolibroДокумент98 страницMatematica 2 EcolibroFiorelaNataloni100% (1)
- Actividad 1 Cuadro Comparativo Ecuaciones LinealesДокумент19 страницActividad 1 Cuadro Comparativo Ecuaciones LinealesDelfis100% (1)