Вам также может понравиться
- Lambda - Designing LED Optical Components DatasheetДокумент2 страницыLambda - Designing LED Optical Components DatasheetifmatosОценок пока нет
- ACS712 DatasheetДокумент15 страницACS712 DatasheetwirawansatriaОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Trabajo 2Документ18 страницTrabajo 2ing_pemОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- 920 4304A Manual 4 23 15Документ38 страниц920 4304A Manual 4 23 15ifmatosОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- BC546 / BC547 / BC548 / BC549 / BC550 NPN Epitaxial Silicon TransistorДокумент6 страницBC546 / BC547 / BC548 / BC549 / BC550 NPN Epitaxial Silicon TransistorIsrael MendozaОценок пока нет
- LED DriversДокумент16 страницLED DriversifmatosОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Ac20 30BДокумент13 страницAc20 30BifmatosОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Light Duty Engineering Lathe User ManualДокумент10 страницLight Duty Engineering Lathe User ManualifmatosОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- c503b Ras Ran Aas Aan Rbs RBN Abs Abn Rcs RCN Acs Acn 1079Документ13 страницc503b Ras Ran Aas Aan Rbs RBN Abs Abn Rcs RCN Acs Acn 1079ifmatosОценок пока нет
- Light Energy: Solar Cell Based On Artificial PhotosynthesisДокумент21 страницаLight Energy: Solar Cell Based On Artificial PhotosynthesisifmatosОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hi VAWT Brief (New Version)Документ80 страницHi VAWT Brief (New Version)ifmatosОценок пока нет
- CCS ManualДокумент257 страницCCS ManualJuan Fco Rocha ParedesОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Light Energy: Solar Cell Based On Artificial PhotosynthesisДокумент21 страницаLight Energy: Solar Cell Based On Artificial PhotosynthesisifmatosОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Bta12 600BW3 DДокумент6 страницBta12 600BW3 DWilliam JPОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
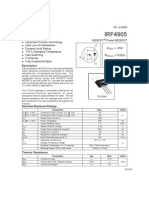
- Irf 4905Документ9 страницIrf 4905plamenvp21Оценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- BC 635Документ4 страницыBC 635Floricica Victor VasileОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Media Movel Teclado Pelo A-DДокумент14 страницMedia Movel Teclado Pelo A-DifmatosОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- OPTO817Документ6 страницOPTO817ifmatosОценок пока нет
- Solid State Circuit Breaker PDFДокумент7 страницSolid State Circuit Breaker PDFifmatosОценок пока нет
- Aoc Service Manual-Hp l1740 Nt68663mefg TPV Power A02 1947Документ60 страницAoc Service Manual-Hp l1740 Nt68663mefg TPV Power A02 1947ifmatosОценок пока нет
- Arquitetura 12F509Документ21 страницаArquitetura 12F509ifmatosОценок пока нет
- Functions of RC Snubber Circuit in SMPS - Electronics Repair and Technology News Function of RC Snubber Circuit in SMPSДокумент4 страницыFunctions of RC Snubber Circuit in SMPS - Electronics Repair and Technology News Function of RC Snubber Circuit in SMPSHavandinhОценок пока нет
- Bidirectional DC-DC Converter for Automobile Electric SystemsДокумент5 страницBidirectional DC-DC Converter for Automobile Electric SystemsrowrerОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- F (C) D Mini Float Level Switch - B0Документ28 страницF (C) D Mini Float Level Switch - B0Tu WentingОценок пока нет
- Nov P/N Yaskawa P/N Description Inter-Co Cost 60RJДокумент4 страницыNov P/N Yaskawa P/N Description Inter-Co Cost 60RJRicardo VillarОценок пока нет
- MANAV RACHNA INTERNATIONAL UNIVERSITY EE-M105: INDUSTRIAL DRIVESДокумент33 страницыMANAV RACHNA INTERNATIONAL UNIVERSITY EE-M105: INDUSTRIAL DRIVESrajfabОценок пока нет
- Digital simulation of DC links and AC machinesДокумент8 страницDigital simulation of DC links and AC machinesNarges FallahОценок пока нет
- DiodeДокумент19 страницDiodekeshavkthakurОценок пока нет
- SEMIKRON Technical Explanation SEMiX5 1200V MLI SKYPER12 Driver Board en 2020-01-21 Rev-05Документ20 страницSEMIKRON Technical Explanation SEMiX5 1200V MLI SKYPER12 Driver Board en 2020-01-21 Rev-05mateus santosОценок пока нет
- Buck Boost SnubberДокумент9 страницBuck Boost Snubberminh_huyОценок пока нет
- ICS 1.1 Safety Guidelines For The Application, Installation, and Maintenance of Solid State ControlДокумент10 страницICS 1.1 Safety Guidelines For The Application, Installation, and Maintenance of Solid State ControlSureshKumarОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Min ArikДокумент84 страницыMin AriklalociscoОценок пока нет
- ELRX213 - X223 Application Note Ver2.0ENДокумент7 страницELRX213 - X223 Application Note Ver2.0ENLuis HuanqqueОценок пока нет
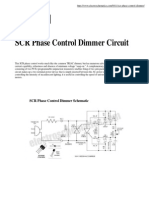
- SCR Phase Control Speed ControlДокумент3 страницыSCR Phase Control Speed ControlWil NelsonОценок пока нет
- Diode Turn-On and Off TimeДокумент50 страницDiode Turn-On and Off TimeUma Kalyani100% (1)
- Power ElectronicДокумент66 страницPower Electronicsalman shariff100% (1)
- Bpe MCQДокумент80 страницBpe MCQSaquibh ShaikhОценок пока нет
- ED 2002 125NexgenieBaseUnitNG16DLNG14RLInstallationManualДокумент2 страницыED 2002 125NexgenieBaseUnitNG16DLNG14RLInstallationManualAmit Chaturvedi100% (1)
- Power Diodes & BJTs GuideДокумент13 страницPower Diodes & BJTs Guideujjwalgupta4Оценок пока нет
- IL410, IL4108 Optocoupler DatasheetДокумент9 страницIL410, IL4108 Optocoupler DatasheetDinesh KumarОценок пока нет
- Soft-Switching Buck Boost Converter Using Passive Snubber Composed of Pulse Current Regenerative Resonant CircuitДокумент5 страницSoft-Switching Buck Boost Converter Using Passive Snubber Composed of Pulse Current Regenerative Resonant CircuitHariesh WaranОценок пока нет
- A Wide-Inputamp Wide-Output WIWO DCamp DC Converter-HIaДокумент10 страницA Wide-Inputamp Wide-Output WIWO DCamp DC Converter-HIaArchОценок пока нет
- Tecnica 144-164Документ21 страницаTecnica 144-164PE TruОценок пока нет
- Power Electronic Module - Chapter 1Документ27 страницPower Electronic Module - Chapter 1jayxcell100% (1)
- A Full-Bridge DC-DC Converter With Zero-Voltage-Switching Over The Entire Conversion RangeДокумент8 страницA Full-Bridge DC-DC Converter With Zero-Voltage-Switching Over The Entire Conversion RangeNirmal mehtaОценок пока нет
- Telwin 111 RepairДокумент20 страницTelwin 111 RepairKlavdija CankarОценок пока нет
- RC Snubers2Документ1 страницаRC Snubers2gruja57Оценок пока нет
- Soft-switching active snubbers reduce losses in DC-DC convertersДокумент13 страницSoft-switching active snubbers reduce losses in DC-DC convertersashish_rewaОценок пока нет
- Fontes Celular Motorola Circuito TNY254PДокумент21 страницаFontes Celular Motorola Circuito TNY254Pjohnny.huОценок пока нет
- Model Number Part Number Description M5307 100 Kip Deadline Anchor 53070000 100-DEADLINEДокумент29 страницModel Number Part Number Description M5307 100 Kip Deadline Anchor 53070000 100-DEADLINEc.valderrabano81Оценок пока нет
- Stepper Motor PDFДокумент15 страницStepper Motor PDFNadeeshani SamarasingheОценок пока нет
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeОт EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeРейтинг: 5 из 5 звезд5/5 (8)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionОт EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionРейтинг: 4.5 из 5 звезд4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsОт EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsРейтинг: 4 из 5 звезд4/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesОт EverandThe Rare Metals War: the dark side of clean energy and digital technologiesРейтинг: 5 из 5 звезд5/5 (2)