Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Astm A182Документ15 страницAstm A182Ferec XalikovОценок пока нет
- Rusif Valiyev CVДокумент277 страницRusif Valiyev CVFerec XalikovОценок пока нет
- Cyclops L User Guide - Issue 1 (23-05-2014) LRДокумент76 страницCyclops L User Guide - Issue 1 (23-05-2014) LRFerec XalikovОценок пока нет
- Essay 1Документ1 страницаEssay 1Ferec XalikovОценок пока нет
- CultureДокумент1 страницаCultureFerec XalikovОценок пока нет
- CultureДокумент1 страницаCultureFerec XalikovОценок пока нет
- GlobalisationДокумент2 страницыGlobalisationFerec XalikovОценок пока нет
- IPE 300 6m Height Lift 1 Ton Weight LiftДокумент1 страницаIPE 300 6m Height Lift 1 Ton Weight LiftFerec XalikovОценок пока нет
- Gost 2789 73Документ1 страницаGost 2789 73Ferec XalikovОценок пока нет
- ME411 Mechanical Engineering MIDTERM 1Документ11 страницME411 Mechanical Engineering MIDTERM 1Ferec XalikovОценок пока нет
- CFD Analysis Results of Gate Valve DN 200 by Use of FLUENT ANSYS SoftwareДокумент24 страницыCFD Analysis Results of Gate Valve DN 200 by Use of FLUENT ANSYS SoftwareFerec XalikovОценок пока нет
- Astm C478Документ8 страницAstm C478Ferec XalikovОценок пока нет
- Catalog81 PDFДокумент128 страницCatalog81 PDFFerec XalikovОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- David-Huynh Indeed ResumeДокумент3 страницыDavid-Huynh Indeed Resumeapi-546353822Оценок пока нет
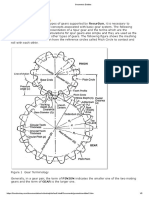
- Geometric Entities: Basic Gear TerminologyДокумент5 страницGeometric Entities: Basic Gear TerminologyMatija RepincОценок пока нет
- Branding HS TalksДокумент17 страницBranding HS TalksumairОценок пока нет
- 4439 Chap01Документ28 страниц4439 Chap01bouthaina otОценок пока нет
- NammalvarДокумент22 страницыNammalvarPranesh Brisingr100% (1)
- ABES Engineering College, Ghaziabad Classroom Photograph: (Ramanujan Block, First Floor)Документ21 страницаABES Engineering College, Ghaziabad Classroom Photograph: (Ramanujan Block, First Floor)Avdhesh GuptaОценок пока нет
- Invoice 1281595768Документ3 страницыInvoice 1281595768vikas9849Оценок пока нет
- Zone Controller: Th-LargeДокумент1 страницаZone Controller: Th-LargeIsmat AraОценок пока нет
- HRM Ass1Документ3 страницыHRM Ass1asdas asfasfasdОценок пока нет
- Ra 11521 9160 9194 AmlaДокумент55 страницRa 11521 9160 9194 Amlagore.solivenОценок пока нет
- Introduction and Instructions: ForewordДокумент20 страницIntroduction and Instructions: ForewordDanang WidoyokoОценок пока нет
- Zambia MTEF 2015 - 2017 (Green Paper)Документ27 страницZambia MTEF 2015 - 2017 (Green Paper)Chola MukangaОценок пока нет
- What Is SAP PS (Project Systems) ModuleДокумент3 страницыWhat Is SAP PS (Project Systems) ModuleahmerОценок пока нет
- The PILOT: July 2023Документ16 страницThe PILOT: July 2023RSCA Redwood ShoresОценок пока нет
- Demand Letter Template 39Документ3 страницыDemand Letter Template 39AIG1 LOGISTICОценок пока нет
- Hortors Online ManualДокумент11 страницHortors Online Manualtshepang4228Оценок пока нет
- Mysuru Royal Institute of Technology. Mandya: Question Bank-1Документ2 страницыMysuru Royal Institute of Technology. Mandya: Question Bank-1chaitragowda213_4732Оценок пока нет
- VOID BEQUESTS - AssignmentДокумент49 страницVOID BEQUESTS - AssignmentAkshay GaykarОценок пока нет
- Advanced Machining User Guide PDFДокумент250 страницAdvanced Machining User Guide PDFDaniel González JuárezОценок пока нет
- Chapter 3 - A Top-Level View of Computer Function and InterconnectionДокумент8 страницChapter 3 - A Top-Level View of Computer Function and InterconnectionChu Quang HuyОценок пока нет
- Partnership Law (Chapter 1 and 2) - ReviewerДокумент9 страницPartnership Law (Chapter 1 and 2) - ReviewerJeanne Marie0% (1)
- ETA-1 Service PDFДокумент44 страницыETA-1 Service PDFgansolОценок пока нет
- Challan FormДокумент2 страницыChallan FormSingh KaramvirОценок пока нет
- Inv69116728 45926324Документ1 страницаInv69116728 45926324dany.cantaragiuОценок пока нет
- BSNL Project MBA NitishДокумент92 страницыBSNL Project MBA NitishAnkitSingh0% (2)
- Review On A Protective Scheme For Wind Power Plant Using Co-Ordination of Overcurrent Relay-NOTA TECNICAДокумент5 страницReview On A Protective Scheme For Wind Power Plant Using Co-Ordination of Overcurrent Relay-NOTA TECNICAEdgardo Kat ReyesОценок пока нет
- Oxford Handbooks Online: From Old To New Developmentalism in Latin AmericaДокумент27 страницOxford Handbooks Online: From Old To New Developmentalism in Latin AmericadiegoОценок пока нет
- Braided Composites ModellingДокумент33 страницыBraided Composites ModellingaamirmubОценок пока нет
- Important Questions Mba-Ii Sem Organisational BehaviourДокумент24 страницыImportant Questions Mba-Ii Sem Organisational Behaviourvikas__ccОценок пока нет
- PETRO TCS Engineering Manual 682Документ44 страницыPETRO TCS Engineering Manual 682paulm3565Оценок пока нет