Вам также может понравиться
- Mediciones de sonido y frecuenciaДокумент42 страницыMediciones de sonido y frecuenciaIsabel ZuñigaОценок пока нет
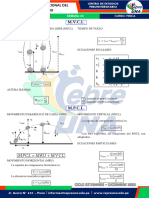
- Problemas Resueltos de Dinamica 2016-IДокумент16 страницProblemas Resueltos de Dinamica 2016-IN.R SquireОценок пока нет
- Espectro InfrarrojoДокумент65 страницEspectro InfrarrojoAdair SalasОценок пока нет
- Ejercicio Centrales TermicasДокумент12 страницEjercicio Centrales TermicasIvan OstaОценок пока нет
- Oscilaciones Amortiguadas Fisica IIДокумент12 страницOscilaciones Amortiguadas Fisica IIheber100% (2)
- Registro de CementacionДокумент16 страницRegistro de CementacionJose RivasОценок пока нет
- Notas Sobre Numeros ComplejosДокумент2 страницыNotas Sobre Numeros ComplejosIvan Osta100% (1)
- Relación Magnitudes Linea FaseДокумент2 страницыRelación Magnitudes Linea FaseIvan OstaОценок пока нет
- Equivalencia de Parametros de CuadripolosДокумент2 страницыEquivalencia de Parametros de CuadripolosIvan OstaОценок пока нет
- Trabajo Tutelado 1 Centros de Trasnformación: Iván Osta Lasheras Raul Ochoa Sevillano Alberto Ansola LozanoДокумент34 страницыTrabajo Tutelado 1 Centros de Trasnformación: Iván Osta Lasheras Raul Ochoa Sevillano Alberto Ansola LozanoIvan OstaОценок пока нет
- Ejercicio CuadripoloДокумент2 страницыEjercicio CuadripoloIvan OstaОценок пока нет
- Newpractica 06v12Документ4 страницыNewpractica 06v12Ivan OstaОценок пока нет
- Tabla 3-Transformadas de LaplaceДокумент2 страницыTabla 3-Transformadas de LaplaceIvan OstaОценок пока нет
- Examen Trifásica II-Ivan OstaДокумент1 страницаExamen Trifásica II-Ivan OstaIvan OstaОценок пока нет
- Examen Electronica ResueltoДокумент5 страницExamen Electronica ResueltoIvan OstaОценок пока нет
- Cuestión TrifásicaДокумент1 страницаCuestión TrifásicaIvan OstaОценок пока нет
- PV - 3 - Comportamiento EléctricoДокумент41 страницаPV - 3 - Comportamiento EléctricoIvan OstaОценок пока нет
- PV 1 EfectofotoelectricoДокумент15 страницPV 1 EfectofotoelectricoIvan OstaОценок пока нет
- SEP189.c02 Analisis SEPДокумент7 страницSEP189.c02 Analisis SEPIvan OstaОценок пока нет
- Tabla 1-Transformaci N Par Metros CuadripolaresДокумент1 страницаTabla 1-Transformaci N Par Metros CuadripolaresIvan OstaОценок пока нет
- SEP189.c01 PR Circuitos I ResumenДокумент5 страницSEP189.c01 PR Circuitos I ResumenIvan OstaОценок пока нет
- Tabla 2-Equivalente en T y en PiДокумент1 страницаTabla 2-Equivalente en T y en PiIvan OstaОценок пока нет
- Transformador - Circuito TrifasicaДокумент21 страницаTransformador - Circuito TrifasicaIvan OstaОценок пока нет
- SEP189.c03b FC BarreroДокумент9 страницSEP189.c03b FC BarreroIvan OstaОценок пока нет
- SEP12 MuestreadosДокумент23 страницыSEP12 MuestreadosIvan OstaОценок пока нет
- Teoria AccionamientosДокумент9 страницTeoria AccionamientosIvan OstaОценок пока нет
- Tabla 3-Transformadas de LaplaceДокумент2 страницыTabla 3-Transformadas de LaplaceIvan OstaОценок пока нет
- Descargos DistribuciónДокумент11 страницDescargos DistribuciónIvan OstaОценок пока нет
- Transformador - Circuito CorrienteДокумент13 страницTransformador - Circuito CorrienteIvan OstaОценок пока нет
- SEP13 CiclicosДокумент29 страницSEP13 CiclicosIvan OstaОценок пока нет
- Lista de Instrucciones AWL PDFДокумент5 страницLista de Instrucciones AWL PDFSURK CREW SОценок пока нет
- Ej HidraДокумент18 страницEj HidraIvan OstaОценок пока нет
- TransformadorДокумент66 страницTransformadorIvan OstaОценок пока нет
- Circuitos magnéticos y campos magnéticosДокумент12 страницCircuitos magnéticos y campos magnéticosIvan OstaОценок пока нет
- Mmee Maquinas ElectricasДокумент23 страницыMmee Maquinas ElectricasIvan OstaОценок пока нет
- Examenes de Repaso Lab FisicaДокумент6 страницExamenes de Repaso Lab FisicaKeren ALmonte GuilamoОценок пока нет
- Ejercicio 7 Centros InstantaneosДокумент1 страницаEjercicio 7 Centros InstantaneosMilton AcarapiОценок пока нет
- Fisica PDFДокумент119 страницFisica PDFivan1991cesar100% (1)
- Soni PDFДокумент78 страницSoni PDFGabriel D'andreaОценок пока нет
- Ejercicios de ondas mecánicas y electromagnéticasДокумент2 страницыEjercicios de ondas mecánicas y electromagnéticasMarcoОценок пока нет
- 30882f - UMSS - Problemas de Olimpiada OBF - OBAA Fase Departamental 1ra Ed PDFДокумент143 страницы30882f - UMSS - Problemas de Olimpiada OBF - OBAA Fase Departamental 1ra Ed PDFHugo FloresОценок пока нет
- Movimentos Rectilineos y Acelerados Laboratorio VirtualДокумент3 страницыMovimentos Rectilineos y Acelerados Laboratorio VirtualAnderson JMОценок пока нет
- Semana 3 Ingenierias - Física - SoluciónДокумент11 страницSemana 3 Ingenierias - Física - Soluciónbmmmas127Оценок пока нет
- Maria Lorenzo Hernández - El Doble Sentido de La Imagen en La AnimaciónДокумент420 страницMaria Lorenzo Hernández - El Doble Sentido de La Imagen en La Animaciónttap79Оценок пока нет
- Lab. Ondas EstacionariasДокумент5 страницLab. Ondas EstacionariasBrayan AnguloОценок пока нет
- Analisis DimensionalДокумент35 страницAnalisis DimensionalWALSEN HELIANОценок пока нет
- Problemas de FuerzasДокумент7 страницProblemas de FuerzasBeto Herrera100% (1)
- Calculo de Factor de FriccionДокумент4 страницыCalculo de Factor de FriccionYordin I Pech ChanОценок пока нет
- Anexo 1 Ejercicios y Formatos Tarea 1"Документ31 страницаAnexo 1 Ejercicios y Formatos Tarea 1"Pachakutiq Territorio Ancestral100% (1)
- Reporte Lab Fisi1 S02 CLДокумент2 страницыReporte Lab Fisi1 S02 CLLeonela cercado VásquezОценок пока нет
- Fisica 3 y 4 2023Документ3 страницыFisica 3 y 4 2023jovanaОценок пока нет
- S02. Práctica - de - Movimiento - CurvilíneoДокумент2 страницыS02. Práctica - de - Movimiento - CurvilíneoLily MosquillazaОценок пока нет
- Fisica 3 MovimientoDosDimensionConClaveДокумент5 страницFisica 3 MovimientoDosDimensionConClaveWilfredo Bizarro100% (1)
- Ejercicio - 4 - Movimiento - Bidimensional - Estudiante # 2Документ3 страницыEjercicio - 4 - Movimiento - Bidimensional - Estudiante # 2angie gonzalezОценок пока нет
- Las Pinzas y Sus AplicacionesДокумент115 страницLas Pinzas y Sus Aplicacionesarchimond6Оценок пока нет
- Habilidad Lógico Matematico - Ing - Unidad 4Документ11 страницHabilidad Lógico Matematico - Ing - Unidad 4Evelyn JustoОценок пока нет
- Investigación sobre difracción, reflexión y refracciónДокумент7 страницInvestigación sobre difracción, reflexión y refracciónJesus Eduardo Huereca SanchezОценок пока нет
- Marcelo Ingunza Garcia Examen Parcial-QuestionarioДокумент5 страницMarcelo Ingunza Garcia Examen Parcial-QuestionarioMarcelo IngunzaОценок пока нет
- PolarizacionДокумент15 страницPolarizacionVladimir OvmfОценок пока нет
- Movimiento rectilíneo uniforme: velocidad y desplazamientoДокумент2 страницыMovimiento rectilíneo uniforme: velocidad y desplazamientoCesar Ernesto Acevedo CamachoОценок пока нет