Вам также может понравиться
- Extended Kalman Filter For UAV AttitudeДокумент8 страницExtended Kalman Filter For UAV AttitudebestatscienceОценок пока нет
- ASME Pressue Vessel ExampleДокумент271 страницаASME Pressue Vessel ExamplesavanchandranОценок пока нет
- Multi Organ Dysfunction SyndromeДокумент40 страницMulti Organ Dysfunction SyndromeDr. Jayesh PatidarОценок пока нет
- Control Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectДокумент157 страницControl Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriОценок пока нет
- The Performance of Feedback Control SystemsДокумент37 страницThe Performance of Feedback Control SystemsmrkmatОценок пока нет
- Tutorial On Kalman FilterДокумент47 страницTutorial On Kalman FiltertadittiОценок пока нет
- Luenberger ObserversДокумент4 страницыLuenberger ObserversMariam YaseenОценок пока нет
- Presentation For ControllerДокумент42 страницыPresentation For ControllerAlakshendra JohariОценок пока нет
- TM 10-3930-669-34 Forklift Truck 6K Drexel MDL R60SL-DC Part 1Документ294 страницыTM 10-3930-669-34 Forklift Truck 6K Drexel MDL R60SL-DC Part 1AdvocateОценок пока нет
- FebvreДокумент449 страницFebvreIan Pereira AlvesОценок пока нет
- UncertaintyДокумент24 страницыUncertaintySanthosh Praveen100% (1)
- Kalman Filtering: Dan SimonДокумент8 страницKalman Filtering: Dan SimonVaBi LeftОценок пока нет
- Control of DC Motor Using Different Control StrategiesОт EverandControl of DC Motor Using Different Control StrategiesОценок пока нет
- Comparison Between Full Order and Minimum Order Observer Controller For DC MotorДокумент6 страницComparison Between Full Order and Minimum Order Observer Controller For DC MotorInternational Journal of Research and DiscoveryОценок пока нет
- Tokyo Guidelines 2018Документ115 страницTokyo Guidelines 2018Alik Razi100% (1)
- Full State Feedback ControlДокумент29 страницFull State Feedback ControlBi Chen100% (1)
- Pellicon 2 Validation Guide PDFДокумент45 страницPellicon 2 Validation Guide PDFtakwahs12135Оценок пока нет
- This Study Addresses The Robust Fault Detection Problem For Continuous-Time Switched Systems With State Delays.Документ5 страницThis Study Addresses The Robust Fault Detection Problem For Continuous-Time Switched Systems With State Delays.sidamineОценок пока нет
- Laporan Eksperimen Kontrol Digital "Pemodelan Dengan Representasi State Space"Документ9 страницLaporan Eksperimen Kontrol Digital "Pemodelan Dengan Representasi State Space"Khoirul Irul IlunkОценок пока нет
- Design of The Deadbeat Controller With Limited Output: L. Balasevicius, G. DervinisДокумент4 страницыDesign of The Deadbeat Controller With Limited Output: L. Balasevicius, G. DervinismailmadoОценок пока нет
- Experiment-1: AIM: For The Given Train Model, Find The State Space ModelДокумент26 страницExperiment-1: AIM: For The Given Train Model, Find The State Space ModelIchigoОценок пока нет
- Control System PracticalДокумент19 страницControl System PracticalYashОценок пока нет
- Motor Modeling and Position Control Lab Week 3: Closed Loop ControlДокумент14 страницMotor Modeling and Position Control Lab Week 3: Closed Loop ControlJanett TrujilloОценок пока нет
- ROB521 Assignment 3 PDFДокумент7 страницROB521 Assignment 3 PDF11 1Оценок пока нет
- Tdoa Based Ugv Localization Using Adaptive Kalman Filter AlgorithmДокумент10 страницTdoa Based Ugv Localization Using Adaptive Kalman Filter AlgorithmAndra HuangОценок пока нет
- Notes On Kalman FilterДокумент5 страницNotes On Kalman FilterdracunciliasizОценок пока нет
- Final Project Japnit SethiДокумент33 страницыFinal Project Japnit Sethizakaria bellahceneОценок пока нет
- Assignment Power System DynamicsДокумент9 страницAssignment Power System DynamicsBittu AgarwalОценок пока нет
- ROB521 Assignment 3Документ7 страницROB521 Assignment 311 1Оценок пока нет
- 11 Gain SchedulingДокумент8 страниц11 Gain Schedulingstathiss11Оценок пока нет
- Constrained Predictive Control of A Servo-Driven Tracking TurretДокумент6 страницConstrained Predictive Control of A Servo-Driven Tracking TurretVu Duc TruongОценок пока нет
- Control System PracticalДокумент13 страницControl System PracticalNITESH KumarОценок пока нет
- Systems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversДокумент6 страницSystems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversColinSimОценок пока нет
- Experiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionДокумент12 страницExperiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionNimra NoorОценок пока нет
- Kalman FilterДокумент27 страницKalman FilterBrett Welch100% (2)
- A Performance Comparison of Robust Adaptive Controllers: Linear SystemsДокумент26 страницA Performance Comparison of Robust Adaptive Controllers: Linear SystemsNacer LabedОценок пока нет
- Mean Square Error Estimation of A Signal: Part B: Matlab or Labview ExperimentsДокумент5 страницMean Square Error Estimation of A Signal: Part B: Matlab or Labview ExperimentsJUVERIA N ZОценок пока нет
- Power System Faults Fault Detection Project-3Документ10 страницPower System Faults Fault Detection Project-3Indrajeet PrasadОценок пока нет
- Poles Selection TheoryДокумент6 страницPoles Selection TheoryRao ZubairОценок пока нет
- Position Estimation For A Mobile Robot Using Data FusionДокумент6 страницPosition Estimation For A Mobile Robot Using Data FusionЋирка ФејзбуџаркаОценок пока нет
- All CodesДокумент8 страницAll Codesa7med.3mvrОценок пока нет
- Objectives:: Lab ReportДокумент6 страницObjectives:: Lab Reportraheel buttОценок пока нет
- Case Study - Kalman Filter Design and SimulationДокумент10 страницCase Study - Kalman Filter Design and Simulationrktiwary256034Оценок пока нет
- Time Series Analysis - Assignment 5: Estimation of The Trajectory of A Satellite Using The Kalman-FilterДокумент5 страницTime Series Analysis - Assignment 5: Estimation of The Trajectory of A Satellite Using The Kalman-Filterklaymen292Оценок пока нет
- Linear System SimulationДокумент9 страницLinear System SimulationAnonymous iTJLpNVОценок пока нет
- Detect Abrupt System Changes Using Identification TechniquesДокумент6 страницDetect Abrupt System Changes Using Identification TechniquesPierpaolo VergatiОценок пока нет
- Laaraiedh PythonPapers KalmanДокумент5 страницLaaraiedh PythonPapers KalmanRyan DavisОценок пока нет
- Kalman DelphiДокумент8 страницKalman DelphiNegru CiprianОценок пока нет
- THRD PD 29febДокумент7 страницTHRD PD 29febvijay_marathe01Оценок пока нет
- Target Tracking Using KalmanДокумент13 страницTarget Tracking Using KalmanAmit Kumar Karna100% (8)
- Experiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemДокумент3 страницыExperiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemSubhaОценок пока нет
- Pandey 2016Документ6 страницPandey 2016Sreekrishna DasОценок пока нет
- DSP ReportДокумент31 страницаDSP Reportrefat01754433564Оценок пока нет
- Rep Sol 1701687561892Документ11 страницRep Sol 1701687561892satwikОценок пока нет
- CoordinatesДокумент82 страницыCoordinatesSnehalagoo LagooОценок пока нет
- Dynamic ErrorДокумент7 страницDynamic ErrorSuvra PattanayakОценок пока нет
- Design of Adaptive Equalizer: Using LMS AlgorithmДокумент8 страницDesign of Adaptive Equalizer: Using LMS Algorithmsoumya0324416Оценок пока нет
- LQRДокумент14 страницLQRStefania Oliveira100% (1)
- Transient & Steady State Response AnalysisДокумент46 страницTransient & Steady State Response AnalysisSwati AgarwalОценок пока нет
- Matlab CodeДокумент13 страницMatlab CodeSelva RajОценок пока нет
- TamrinДокумент7 страницTamrintriziounОценок пока нет
- Kalman ObserverДокумент5 страницKalman Observerkhadars_5Оценок пока нет
- Nonlinear Control Feedback Linearization Sliding Mode ControlОт EverandNonlinear Control Feedback Linearization Sliding Mode ControlОценок пока нет
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsОт EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsОценок пока нет
- Asme b16-25Документ22 страницыAsme b16-25JamesОценок пока нет
- MC MATH 01 Syllabus SJCCДокумент11 страницMC MATH 01 Syllabus SJCCAcire NonacОценок пока нет
- Reading Part 2Документ14 страницReading Part 2drama channelОценок пока нет
- TheBasicsofBrainWaves - RS PDFДокумент4 страницыTheBasicsofBrainWaves - RS PDFOnutu Adriana-LilianaОценок пока нет
- Danika Cristoal 18aДокумент4 страницыDanika Cristoal 18aapi-462148990Оценок пока нет
- End of Summer Course Test August 2021Документ16 страницEnd of Summer Course Test August 2021Thanh Nguyen vanОценок пока нет
- Aquaculture Scoop May IssueДокумент20 страницAquaculture Scoop May IssueAquaculture ScoopОценок пока нет
- Free Electron TheoryДокумент8 страницFree Electron TheoryNeelam KapoorОценок пока нет
- Armadio Presentation-2019Документ45 страницArmadio Presentation-2019Subhash Singh TomarОценок пока нет
- Youth Camp Registration Form-2022Документ1 страницаYouth Camp Registration Form-2022FlerkОценок пока нет
- Diagnosis of TrypanosomiasisДокумент82 страницыDiagnosis of TrypanosomiasisDrVijayata Choudhary100% (1)
- 500 TransДокумент5 страниц500 TransRodney WellsОценок пока нет
- ContempoДокумент4 страницыContempoPrincess Jonette YumulОценок пока нет
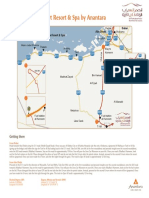
- Qasr Al Sarab Desert Resort Location Map June2012Документ1 страницаQasr Al Sarab Desert Resort Location Map June2012Anant GârgОценок пока нет
- c270 KW NTA855G2 60 HZДокумент31 страницаc270 KW NTA855G2 60 HZAhmad El KhatibОценок пока нет
- T.A.T.U. - Waste Management - Digital BookletДокумент14 страницT.A.T.U. - Waste Management - Digital BookletMarieBLОценок пока нет
- Anderson, Poul - Flandry 02 - A Circus of HellsДокумент110 страницAnderson, Poul - Flandry 02 - A Circus of Hellsgosai83Оценок пока нет
- Bardonna MenuДокумент16 страницBardonna MenuFarley ElliottОценок пока нет
- Volvo Penta GensetДокумент4 страницыVolvo Penta GensetafandybaharuddinОценок пока нет
- W0L0XCF0866101640 (2006 Opel Corsa) PDFДокумент7 страницW0L0XCF0866101640 (2006 Opel Corsa) PDFgianyОценок пока нет
- MA 106: Linear Algebra Tutorial 1: Prof. B.V. Limaye IIT DharwadДокумент4 страницыMA 106: Linear Algebra Tutorial 1: Prof. B.V. Limaye IIT Dharwadamar BaroniaОценок пока нет
- Usp Description and SolubilityДокумент1 страницаUsp Description and SolubilityvafaashkОценок пока нет
- Coding Decoding Sheet - 01 1678021709186Документ9 страницCoding Decoding Sheet - 01 1678021709186Sumit VermaОценок пока нет
- Manuscript FsДокумент76 страницManuscript FsRalph HumpaОценок пока нет