Вам также может понравиться
- How Parallel Ports WorkДокумент4 страницыHow Parallel Ports Workapi-19737301Оценок пока нет
- Grobal Dca ThreeДокумент12 страницGrobal Dca ThreeAdeelОценок пока нет
- SM Finalnew Vol2 Cp7 CHAPTER 7Документ51 страницаSM Finalnew Vol2 Cp7 CHAPTER 7Prin PrinksОценок пока нет
- RP Monthly Tax RemittanceДокумент1 страницаRP Monthly Tax RemittancePaul100% (1)
- EAOM19Документ43 страницыEAOM19nanocycleОценок пока нет
- Expenses Control The Two Kinds of Expenses To ControlДокумент19 страницExpenses Control The Two Kinds of Expenses To ControlNathanFrancisОценок пока нет
- IELTS Writing Actual Tests 2008Документ4 страницыIELTS Writing Actual Tests 2008FLed NguyenОценок пока нет
- LOC Taxed Under ITAДокумент3 страницыLOC Taxed Under ITARizhatul AizatОценок пока нет
- 6 Storey Sesco HT ApplicationДокумент1 страница6 Storey Sesco HT ApplicationNunu JieОценок пока нет
- Lecture 2 - Residence Status (Latest)Документ22 страницыLecture 2 - Residence Status (Latest)Anis Idayu AbdullahОценок пока нет
- Strategic Management Fundamentals for Long-Term SuccessДокумент22 страницыStrategic Management Fundamentals for Long-Term SuccessShabira MoushinaОценок пока нет
- Application Configuration REG630 PDFДокумент29 страницApplication Configuration REG630 PDFManikanda RajaОценок пока нет
- OCTOPUS INSPECTION REPORTДокумент14 страницOCTOPUS INSPECTION REPORTLuthfi Nur AlwiОценок пока нет
- EE LAB MANUAL FOR ELECTRICAL EXPERIMENTSДокумент45 страницEE LAB MANUAL FOR ELECTRICAL EXPERIMENTSSai Karthi100% (1)
- Transfer Pricing (Module 7-b)Документ9 страницTransfer Pricing (Module 7-b)Karlovy DalinОценок пока нет
- MalaysiaДокумент5 страницMalaysiapadpakОценок пока нет
- Cell-Phone Frequencies: IndiaДокумент21 страницаCell-Phone Frequencies: Indiaapi-19737301Оценок пока нет
- How PCI Works: Hop On The Bus, GusДокумент7 страницHow PCI Works: Hop On The Bus, Gusapi-19737301Оценок пока нет
- Gun Rod Replacement 1V2PДокумент5 страницGun Rod Replacement 1V2PjoecentroneОценок пока нет
- Presentation1 TNB Smart MeterДокумент9 страницPresentation1 TNB Smart Metermohd faizalОценок пока нет
- How SCSI WorksДокумент9 страницHow SCSI WorksPhaniraj LenkalapallyОценок пока нет
- My Career GoalsДокумент1 страницаMy Career GoalsCaleb NewquistОценок пока нет
- How Newsgroups WorkДокумент8 страницHow Newsgroups WorkPhaniraj LenkalapallyОценок пока нет
- Cost of ProductionДокумент24 страницыCost of ProductionPiyush MahajanОценок пока нет
- Generating EquipmentДокумент60 страницGenerating EquipmentShahrul Yusri Mohd YusufОценок пока нет
- First Year Engineering Practices Lab Manual - Author Gandhi.R, Asso - Professor/EEE, GNANAMANI COLLEGE of ENGINEERING, NAMAKKALДокумент41 страницаFirst Year Engineering Practices Lab Manual - Author Gandhi.R, Asso - Professor/EEE, GNANAMANI COLLEGE of ENGINEERING, NAMAKKALGandhi Ramasamy100% (3)
- Replacing The Double Acting Solenoid 1V2P and 1V6P MachinesДокумент2 страницыReplacing The Double Acting Solenoid 1V2P and 1V6P MachinesjoecentroneОценок пока нет
- Solenoid Replacement 1V2P (CAMC2E001-A)Документ3 страницыSolenoid Replacement 1V2P (CAMC2E001-A)joecentroneОценок пока нет
- Method Statement SESCOДокумент1 страницаMethod Statement SESCOJohn HaОценок пока нет
- Week8 Assignment8 Solutions PDFДокумент5 страницWeek8 Assignment8 Solutions PDFAnonymous 2sYMGmw18aОценок пока нет
- How PC Power Supplies WorkДокумент5 страницHow PC Power Supplies WorkPhaniraj Lenkalapally100% (1)
- Cleaner Production Blueprint For MalaysiaДокумент31 страницаCleaner Production Blueprint For MalaysiaAbraham ChongОценок пока нет
- 33kV Indoor Switchgear Technical DetailsДокумент19 страниц33kV Indoor Switchgear Technical DetailsBala KumaranОценок пока нет
- How Floppy Disk Drives WorkДокумент4 страницыHow Floppy Disk Drives WorkPhaniraj LenkalapallyОценок пока нет
- Prime Movers, Voltage Regulators, And Power GenerationДокумент5 страницPrime Movers, Voltage Regulators, And Power GenerationdskymaximusОценок пока нет
- DR Revision Pack 2011-12rrДокумент17 страницDR Revision Pack 2011-12rrrounak333Оценок пока нет
- Neutral Point Treatment and Earth Fault Suppression PDFДокумент6 страницNeutral Point Treatment and Earth Fault Suppression PDFmsuriОценок пока нет
- Unit 9 Retail Mathematics For Buying and Merchandising: StructureДокумент17 страницUnit 9 Retail Mathematics For Buying and Merchandising: StructureAmisha SinghОценок пока нет
- Brand Management of Sapphire Group in CityДокумент6 страницBrand Management of Sapphire Group in Cityaq GreaterОценок пока нет
- Car LoanДокумент8 страницCar LoanChee CungОценок пока нет
- Guidelines For Detailed Project ReportДокумент2 страницыGuidelines For Detailed Project Reportrahul patelОценок пока нет
- Vehicle Coverage 10B0Ver Asian 1 (PERODUA) PDFДокумент2 страницыVehicle Coverage 10B0Ver Asian 1 (PERODUA) PDFSiva GuruОценок пока нет
- 6 Simple Rules To Ensure Substation Safety - EEPДокумент4 страницы6 Simple Rules To Ensure Substation Safety - EEPDeepakJainОценок пока нет
- Diagnosing The Causes of Stones Throwing Mini CamsДокумент11 страницDiagnosing The Causes of Stones Throwing Mini CamsjoecentroneОценок пока нет
- Coconut Chutney RecipeДокумент9 страницCoconut Chutney RecipePrin PrinksОценок пока нет
- Malaysian Tax ResidenceДокумент7 страницMalaysian Tax ResidenceramanaraoОценок пока нет
- Setter Gun Nozzle Tip ReplacementДокумент1 страницаSetter Gun Nozzle Tip ReplacementjoecentroneОценок пока нет
- ISO9001 Vs 21 CFR 820Документ2 страницыISO9001 Vs 21 CFR 820Hairulanuar SuliОценок пока нет
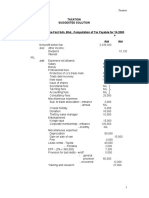
- Taxation Suggested Solution: LessДокумент9 страницTaxation Suggested Solution: LesskannadhassОценок пока нет
- Electrical Engineering Lab ManualДокумент82 страницыElectrical Engineering Lab ManualManasa Sathyanarayana SОценок пока нет
- CHAPTER 1 TaxationДокумент14 страницCHAPTER 1 TaxationCharmaine Deirdre Dave100% (1)
- Gun Up Down Sensors 1V6PДокумент5 страницGun Up Down Sensors 1V6PjoecentroneОценок пока нет
- Old 1v6p Cams PartsДокумент18 страницOld 1v6p Cams PartsjoecentroneОценок пока нет
- How Video Game Systems WorkДокумент11 страницHow Video Game Systems WorkPhaniraj LenkalapallyОценок пока нет
- Introduction to MicroprocessorsДокумент11 страницIntroduction to MicroprocessorsSupriya NairОценок пока нет
- How Microprocessors Work: The Heart of Your ComputerДокумент10 страницHow Microprocessors Work: The Heart of Your Computeruma_maduraiОценок пока нет
- How Microprocessors WorkДокумент9 страницHow Microprocessors WorkFaraz HumayunОценок пока нет
- How Microprocessors WorkДокумент9 страницHow Microprocessors WorkDanish RazaОценок пока нет
- How Microprocessors WorkДокумент9 страницHow Microprocessors WorkDanish RazaОценок пока нет
- Microprocessor WorkingДокумент4 страницыMicroprocessor Workingapi-3760834100% (1)
- Computer NetworkingДокумент69 страницComputer NetworkingISHAN CHAUDHARYОценок пока нет
- How PCs WorkДокумент8 страницHow PCs Workapi-19737301Оценок пока нет
- Cell-Phone Frequencies: IndiaДокумент21 страницаCell-Phone Frequencies: Indiaapi-19737301Оценок пока нет
- How PCI Works: Hop On The Bus, GusДокумент7 страницHow PCI Works: Hop On The Bus, Gusapi-19737301Оценок пока нет
- How RAM WorksДокумент8 страницHow RAM Worksapi-19737301Оценок пока нет
- How Motherboards WorkДокумент5 страницHow Motherboards Workapi-19737301Оценок пока нет
- How Graphics Cards WorkДокумент5 страницHow Graphics Cards Workapi-19737301Оценок пока нет
- How Bits and Bytes WorkДокумент7 страницHow Bits and Bytes Workapi-19737301Оценок пока нет
- How Flash Memory WorksДокумент5 страницHow Flash Memory Worksapi-19737301Оценок пока нет
- How IDE Controllers WorkДокумент6 страницHow IDE Controllers Workapi-19737301Оценок пока нет
- How AGP WorksДокумент7 страницHow AGP Worksapi-19737301Оценок пока нет
- How Computer Monitors WorkДокумент7 страницHow Computer Monitors Workbpmishra92Оценок пока нет
- How Ethernet WorksДокумент9 страницHow Ethernet Worksapi-19737301Оценок пока нет
- How BIOS WorksДокумент5 страницHow BIOS Worksapi-19737301100% (1)
- Writing C Code For The 8051Документ52 страницыWriting C Code For The 8051BHUSHANОценок пока нет
- Technical Aptitude TestДокумент175 страницTechnical Aptitude TestSURENDRA GOUTHAMОценок пока нет
- Class Photo'sДокумент10 страницClass Photo'sapi-19737301Оценок пока нет
- Pocket Guide To DSP ProcessorsДокумент1 страницаPocket Guide To DSP Processorsapi-19737301Оценок пока нет
- TrendДокумент3 страницыTrendapi-19737301Оценок пока нет
- ClasswiseTimeTable Wef 16feb2009 E&EEДокумент11 страницClasswiseTimeTable Wef 16feb2009 E&EEapi-19737301Оценок пока нет
- 8051 Instruction SetДокумент28 страниц8051 Instruction Setapi-19737301Оценок пока нет
- JAE InterconnectSelectionGuideДокумент24 страницыJAE InterconnectSelectionGuidejovares2099Оценок пока нет
- SEBV2579Документ26 страницSEBV2579Alejandro Alberto Robalino MendezОценок пока нет
- Epson Stylus Pro 7900/9900: Printer GuideДокумент208 страницEpson Stylus Pro 7900/9900: Printer GuideJamesОценок пока нет
- 3WL11-13 Air Circuit Breakers: Reliable, Versatile and Perfectly IntegratedДокумент2 страницы3WL11-13 Air Circuit Breakers: Reliable, Versatile and Perfectly IntegratedDinuro DiОценок пока нет
- Operating Principles of Electronic Engine Management SystemsДокумент6 страницOperating Principles of Electronic Engine Management SystemsVaishali Wagh100% (2)
- LC1F115 Schneider Electric-DataSheetДокумент3 страницыLC1F115 Schneider Electric-DataSheetRAUL ORTIZОценок пока нет
- Medium High MotorsДокумент20 страницMedium High Motorsshcoway100% (1)
- Plasma Software Setup and Usage Guide v0005Документ24 страницыPlasma Software Setup and Usage Guide v0005M. Rizki SahrudiОценок пока нет
- HFY3-3690-00-ELE-ITP-0001 - 0 ITP For Electrical Inspection and Test PlanДокумент97 страницHFY3-3690-00-ELE-ITP-0001 - 0 ITP For Electrical Inspection and Test PlanAmmar AlkindyОценок пока нет
- Mock Test PDFДокумент15 страницMock Test PDFakshayОценок пока нет
- Galaxy G1 User ManualДокумент70 страницGalaxy G1 User ManualRandy Mucha V.Оценок пока нет
- Emcc-Rf Smoke System Z3Документ70 страницEmcc-Rf Smoke System Z3Mohammad FarajОценок пока нет
- M3040idn Service ManualДокумент490 страницM3040idn Service ManualAdamОценок пока нет
- Gallium Nitride 28V, 100W RF Power TransistorДокумент10 страницGallium Nitride 28V, 100W RF Power TransistorJohan BecerraОценок пока нет
- Choosing The Right PV VoltageДокумент1 страницаChoosing The Right PV Voltagedabs_orangejuiceОценок пока нет
- The Main Circuit Board of A MicrocomputerДокумент16 страницThe Main Circuit Board of A Microcomputeramandeep123Оценок пока нет
- AN4069Документ10 страницAN4069diegooliveira101010Оценок пока нет
- Enhancement Mode MOSFET (N-Channel)Документ8 страницEnhancement Mode MOSFET (N-Channel)De Jesus VillarroelОценок пока нет
- DCR Power Controllers For Ionpure Cedi ModulesДокумент2 страницыDCR Power Controllers For Ionpure Cedi ModulesArvind LodhiОценок пока нет
- BJT Biasing (Complete)Документ64 страницыBJT Biasing (Complete)Hung PhamОценок пока нет
- United States Patent: Barger Et Al. (45) Date of Patent: Jun. 15, 2004Документ39 страницUnited States Patent: Barger Et Al. (45) Date of Patent: Jun. 15, 2004Gek CagatanОценок пока нет
- EE203 Electrical MeasurementsДокумент2 страницыEE203 Electrical MeasurementsReeta DuttaОценок пока нет
- Varispeed-RC: Power Regenerative Unit (VS-656RC5)Документ15 страницVarispeed-RC: Power Regenerative Unit (VS-656RC5)physicudoОценок пока нет
- Physics XII Concept Maps PDFДокумент15 страницPhysics XII Concept Maps PDFcbsegirlsaipmt100% (1)
- Installation and operating instructions for Speedmatic Easy water pumpsДокумент28 страницInstallation and operating instructions for Speedmatic Easy water pumpsdemonarundoОценок пока нет
- AVP How To GuideДокумент45 страницAVP How To Guidemiltoncg0% (1)
- Commissioning and Maintenance of Electrical EquipmentДокумент60 страницCommissioning and Maintenance of Electrical Equipmentbisrat zerabirukОценок пока нет
- AI Based Controller For Three Phase Three Level, Soft Switched, Phase Shift PWM DC To DC Converter For High Power ApplicationДокумент7 страницAI Based Controller For Three Phase Three Level, Soft Switched, Phase Shift PWM DC To DC Converter For High Power ApplicationJyothiPunemОценок пока нет
- Ciac Eficiencia 13 Cg41eДокумент2 страницыCiac Eficiencia 13 Cg41eFreddy GomezОценок пока нет
- Numerical No.-1 Calculation of Voltage Drop of Single ConsumerДокумент2 страницыNumerical No.-1 Calculation of Voltage Drop of Single ConsumerER ABHISHEK MISHRAОценок пока нет