Вам также может понравиться
- Motor Protection Circuit Breaker Design BasicsДокумент15 страницMotor Protection Circuit Breaker Design BasicsKI OHОценок пока нет
- Motor Protection Depending On Size and Voltage LevelДокумент6 страницMotor Protection Depending On Size and Voltage LevelsulphurdioxideОценок пока нет
- Molded Case Circuit BreakersДокумент6 страницMolded Case Circuit BreakersSatheesh Kumar NatarajanОценок пока нет
- All About Motors: Moeller Wiring Manual 02/08Документ112 страницAll About Motors: Moeller Wiring Manual 02/08Ahsan Mahmood TanoliОценок пока нет
- What-Is-Adv of TMCBДокумент4 страницыWhat-Is-Adv of TMCBabdulwasi22Оценок пока нет
- Protection of Induction MotorДокумент30 страницProtection of Induction MotorNivesh AgarwalОценок пока нет
- Starter Types and OperationДокумент7 страницStarter Types and OperationSyukrirashiduhakim SubandiОценок пока нет
- SquareD Overload and Thermal SelectorДокумент43 страницыSquareD Overload and Thermal SelectormtckrОценок пока нет
- Question No 1Документ14 страницQuestion No 1Hamza AliОценок пока нет
- Group 20 presents principles of star-delta motor startingДокумент22 страницыGroup 20 presents principles of star-delta motor startingRiya Priyadarshni80% (5)
- Star DeltaДокумент6 страницStar DeltaNurain XuОценок пока нет
- Design of Motor Control CenterДокумент8 страницDesign of Motor Control CenterbhaveshbhoiОценок пока нет
- PowerPoint - Introduction To Protection RelayДокумент53 страницыPowerPoint - Introduction To Protection RelayGopinath Subramani0% (1)
- Motor Protection Circuit Breaker Design BasicsДокумент12 страницMotor Protection Circuit Breaker Design Basicsjustog_12Оценок пока нет
- L&T Type 2 Co-Ordination Selection ChartsДокумент48 страницL&T Type 2 Co-Ordination Selection Chartsrdeepak99100% (7)
- Protect motors from short circuits with fuses and circuit breakersДокумент4 страницыProtect motors from short circuits with fuses and circuit breakersTigrilloОценок пока нет
- Protection Of: AlternatorДокумент27 страницProtection Of: AlternatorDev KumarОценок пока нет
- 13.MCB For Motor ProtectionДокумент48 страниц13.MCB For Motor Protectionrajinipre-1Оценок пока нет
- Protection of Ac Generators and Motors: Generator FaultsДокумент10 страницProtection of Ac Generators and Motors: Generator FaultsasdasasdsdfsdfОценок пока нет
- Unit 3 - Electromagnetic & Static Relays PDFДокумент94 страницыUnit 3 - Electromagnetic & Static Relays PDFAkula VeerrajuОценок пока нет
- Power Electronics Guide: Soft Starters ExplainedДокумент10 страницPower Electronics Guide: Soft Starters ExplaineddcasdcОценок пока нет
- Workshop Class-1 04421Документ16 страницWorkshop Class-1 04421Ahu MuslemОценок пока нет
- Induction Motors Guide for Farm ApplicationsДокумент9 страницInduction Motors Guide for Farm ApplicationsramfalОценок пока нет
- Prospect / Retrospect: Setting Motor Protection RelayДокумент4 страницыProspect / Retrospect: Setting Motor Protection Relayrajpre1213Оценок пока нет
- Guide to Electrical Components and Motor ProtectionДокумент16 страницGuide to Electrical Components and Motor Protectionviralshukla85Оценок пока нет
- Electric Motor 6Документ20 страницElectric Motor 6abdulkadhir100% (1)
- Choosing Relays Contactors and Motor Sta PDFДокумент2 страницыChoosing Relays Contactors and Motor Sta PDFshahadat08Оценок пока нет
- Application of Undervoltage Protection To Critical Motors PDFДокумент6 страницApplication of Undervoltage Protection To Critical Motors PDFarisОценок пока нет
- Induction Motor Protection GuideДокумент28 страницInduction Motor Protection GuideJaleesОценок пока нет
- Detection of Fault of Three Phase Induction Motor Using Arduino Uno R2 MicrocontrollerДокумент3 страницыDetection of Fault of Three Phase Induction Motor Using Arduino Uno R2 Microcontrollerwondi BETОценок пока нет
- Motor ProtectionДокумент41 страницаMotor Protectionrjphansalkar100% (3)
- Major Faults in An Alternator and Their Protection. - Electrical BlogДокумент6 страницMajor Faults in An Alternator and Their Protection. - Electrical BlogAditya Shiva AppallaОценок пока нет
- SWGP - LEARNING MATERIAL - Unit 4Документ26 страницSWGP - LEARNING MATERIAL - Unit 447DEESUBRATA KAYALОценок пока нет
- Direct On Line Starter - Electrical Notes & ArticlesДокумент13 страницDirect On Line Starter - Electrical Notes & ArticlesRanaSinhaОценок пока нет
- Type 2 CoordinationДокумент5 страницType 2 CoordinationshivaramОценок пока нет
- Calculation of KVARДокумент15 страницCalculation of KVARAnshul Jain100% (1)
- Electrical Choosing Relays Motor Starters ContactorsДокумент2 страницыElectrical Choosing Relays Motor Starters ContactorsNishant KumarОценок пока нет
- Giceva 2018Документ4 страницыGiceva 2018Marko_DelОценок пока нет
- Electrical Drive 2015 RegularДокумент64 страницыElectrical Drive 2015 Regularkabtamu mamoОценок пока нет
- Type 2 Co-Ordination Selection ChartsДокумент20 страницType 2 Co-Ordination Selection ChartsDheeraj YadavОценок пока нет
- Girls File MaterialДокумент35 страницGirls File Materialcomputer techОценок пока нет
- AC Motors Protection Against Short CircuitsДокумент4 страницыAC Motors Protection Against Short Circuitsat35Оценок пока нет
- 9907-Tips For TroubleshootingДокумент7 страниц9907-Tips For TroubleshootingnasrunОценок пока нет
- Unit-3: (This Unit Covers Criteria P4, P5, P7, D2) Motor StartersДокумент15 страницUnit-3: (This Unit Covers Criteria P4, P5, P7, D2) Motor StartersMuhja AljaserОценок пока нет
- Major Enam - AssignmentДокумент6 страницMajor Enam - AssignmentSajjad HossainОценок пока нет
- Direct On Line Motor StarterДокумент11 страницDirect On Line Motor StarterGowtham KasalaОценок пока нет
- Introduction to Power System ProtectionОт EverandIntroduction to Power System ProtectionРейтинг: 5 из 5 звезд5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesОт EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesОценок пока нет
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- Ignition, Timing And Valve Setting: A Comprehensive Illustrated Manual of Self-Instruction for Automobile Owners, Operators, Repairmen, and All Interested in Motoring.От EverandIgnition, Timing And Valve Setting: A Comprehensive Illustrated Manual of Self-Instruction for Automobile Owners, Operators, Repairmen, and All Interested in Motoring.Рейтинг: 3 из 5 звезд3/5 (4)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationОт EverandStudy of a reluctance magnetic gearbox for energy storage system applicationРейтинг: 1 из 5 звезд1/5 (1)
- PumpsДокумент26 страницPumpsrajishrrrОценок пока нет
- Welding Course ManualДокумент68 страницWelding Course Manualapi-3701567Оценок пока нет
- Oil Water Separator (OWS)Документ11 страницOil Water Separator (OWS)api-3701567100% (1)
- Ac GeneratorsДокумент7 страницAc Generatorsஆரமுதன் கருணாகரன்Оценок пока нет
- Microbial ContaminationДокумент2 страницыMicrobial Contaminationapi-3701567Оценок пока нет
- BatteriesДокумент23 страницыBatteriesapi-3701567100% (2)
- Sewage Treatment Plant: MD - ShamsuzzamanДокумент11 страницSewage Treatment Plant: MD - Shamsuzzamanapi-3701567100% (3)
- Automatic Voltage Regulation AimДокумент6 страницAutomatic Voltage Regulation Aimapi-3701567Оценок пока нет
- Parallel Operation of AlternatorsДокумент12 страницParallel Operation of Alternatorsapi-3701567Оценок пока нет
- Air Circuit Breaker and Generator ProtectionДокумент10 страницAir Circuit Breaker and Generator Protectionapi-3701567Оценок пока нет
- 1 Semiconductors 02Документ1 страница1 Semiconductors 02api-3701567Оценок пока нет
- Three-Phase A.C. Motor Starters AIMДокумент11 страницThree-Phase A.C. Motor Starters AIMapi-3701567Оценок пока нет
- Microbes in Lub OilДокумент1 страницаMicrobes in Lub Oilapi-3701567Оценок пока нет
- Bearing MetalsДокумент1 страницаBearing Metalsapi-3701567Оценок пока нет
- Effect of Low Sulphur FuelДокумент2 страницыEffect of Low Sulphur Fuelapi-3701567Оценок пока нет
- Inlet & Exhaust Valves & Actuating MechanismДокумент42 страницыInlet & Exhaust Valves & Actuating Mechanismapi-3701567Оценок пока нет
- General Bearing Requirements and Design CriteriaДокумент6 страницGeneral Bearing Requirements and Design Criteriaapi-3701567100% (2)
- BearingsДокумент4 страницыBearingsaloordominicОценок пока нет
- Cylinder Lubrication Timed InjectionДокумент6 страницCylinder Lubrication Timed Injectionapi-3701567Оценок пока нет
- Lubricating Oil Purification TestingДокумент9 страницLubricating Oil Purification Testingapi-3701567Оценок пока нет
- Lubricating OilДокумент1 страницаLubricating Oilapi-3701567Оценок пока нет
- Crosshead With Connecting Rod PurposeДокумент14 страницCrosshead With Connecting Rod Purposeapi-3701567100% (9)
- 1995, and To Video VC682 Part 1 For DetailsДокумент5 страниц1995, and To Video VC682 Part 1 For Detailsapi-3701567Оценок пока нет
- Resin ChockДокумент9 страницResin Chockapi-3701567Оценок пока нет
- GreaseДокумент1 страницаGreaseapi-3701567Оценок пока нет
- Scavenge Fires: Rajan Bhandari Senior Lecturer Singapore Maritime AcdemyДокумент12 страницScavenge Fires: Rajan Bhandari Senior Lecturer Singapore Maritime Acdemyapi-3701567Оценок пока нет
- Function of A Lubricant: Ref To Page 48 Diesel Engines 3rd Edition, A J WhartonДокумент11 страницFunction of A Lubricant: Ref To Page 48 Diesel Engines 3rd Edition, A J Whartonapi-3701567Оценок пока нет
- Crankcase Relief DoorДокумент7 страницCrankcase Relief Doorapi-3701567Оценок пока нет
- Oil Mist DetectorДокумент9 страницOil Mist Detectorapi-3701567100% (1)
- R19 MPMC Lab Manual SVEC-Revanth-III-IIДокумент135 страницR19 MPMC Lab Manual SVEC-Revanth-III-IIDarshan BysaniОценок пока нет
- Phasin Ngamthanaphaisarn - Unit 3 - Final Assessment Literary EssayДокумент4 страницыPhasin Ngamthanaphaisarn - Unit 3 - Final Assessment Literary Essayapi-428138727Оценок пока нет
- Training Effectiveness ISO 9001Документ50 страницTraining Effectiveness ISO 9001jaiswalsk1Оценок пока нет
- Wonder at The Edge of The WorldДокумент3 страницыWonder at The Edge of The WorldLittle, Brown Books for Young Readers0% (1)
- Canine Guided Occlusion and Group FuntionДокумент1 страницаCanine Guided Occlusion and Group Funtionlittlestar35100% (3)
- Apple NotesДокумент3 страницыApple NotesKrishna Mohan ChennareddyОценок пока нет
- Item Survey Harga Juli 2023Документ16 страницItem Survey Harga Juli 2023Haji Untung (Sukma)Оценок пока нет
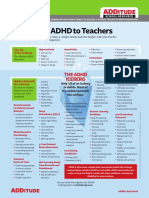
- Explaining ADHD To TeachersДокумент1 страницаExplaining ADHD To TeachersChris100% (2)
- Maternity and Newborn MedicationsДокумент38 страницMaternity and Newborn MedicationsJaypee Fabros EdraОценок пока нет
- Surah 25. Al-Furqan, Ayat 63-69 PDFДокумент1 страницаSurah 25. Al-Furqan, Ayat 63-69 PDFMusaab MustaphaОценок пока нет
- PIA Project Final PDFДокумент45 страницPIA Project Final PDFFahim UddinОценок пока нет
- Astrology - House SignificationДокумент4 страницыAstrology - House SignificationsunilkumardubeyОценок пока нет
- Relations of Political Science with other social sciencesДокумент12 страницRelations of Political Science with other social sciencesBishnu Padhi83% (6)
- Chapter 12 The Incredible Story of How The Great Controversy Was Copied by White From Others, and Then She Claimed It To Be Inspired.Документ6 страницChapter 12 The Incredible Story of How The Great Controversy Was Copied by White From Others, and Then She Claimed It To Be Inspired.Barry Lutz Sr.Оценок пока нет
- SCMReport Group4 MilmaДокумент10 страницSCMReport Group4 MilmaJyotsna Gautam0% (1)
- Operational Risk Roll-OutДокумент17 страницOperational Risk Roll-OutLee WerrellОценок пока нет
- Contextual Teaching Learning For Improving Refrigeration and Air Conditioning Course On The Move To Prepare The Graduates To Be Teachers in Schools of International LevelДокумент15 страницContextual Teaching Learning For Improving Refrigeration and Air Conditioning Course On The Move To Prepare The Graduates To Be Teachers in Schools of International LevelHartoyoОценок пока нет
- De So 2 de Kiem Tra Giua Ki 2 Tieng Anh 8 Moi 1677641450Документ4 страницыDe So 2 de Kiem Tra Giua Ki 2 Tieng Anh 8 Moi 1677641450phuong phamthihongОценок пока нет
- Search Inside Yourself PDFДокумент20 страницSearch Inside Yourself PDFzeni modjo02Оценок пока нет
- Addendum Dokpil Patimban 2Документ19 страницAddendum Dokpil Patimban 2HeriYantoОценок пока нет
- Opportunity, Not Threat: Crypto AssetsДокумент9 страницOpportunity, Not Threat: Crypto AssetsTrophy NcОценок пока нет
- Setting MemcacheДокумент2 страницыSetting MemcacheHendra CahyanaОценок пока нет
- Toolkit:ALLCLEAR - SKYbrary Aviation SafetyДокумент3 страницыToolkit:ALLCLEAR - SKYbrary Aviation Safetybhartisingh0812Оценок пока нет
- DINDIGULДокумент10 страницDINDIGULAnonymous BqLSSexOОценок пока нет
- 1120 Assessment 1A - Self-Assessment and Life GoalДокумент3 страницы1120 Assessment 1A - Self-Assessment and Life GoalLia LeОценок пока нет
- Final Key 2519Документ2 страницыFinal Key 2519DanielchrsОценок пока нет
- Sangam ReportДокумент37 страницSangam ReportSagar ShriОценок пока нет
- Advanced VLSI Architecture Design For Emerging Digital SystemsДокумент78 страницAdvanced VLSI Architecture Design For Emerging Digital Systemsgangavinodc123Оценок пока нет
- 2019 Batch PapersДокумент21 страница2019 Batch PaperssaranshjainworkОценок пока нет
- Technical Contract for 0.5-4X1300 Slitting LineДокумент12 страницTechnical Contract for 0.5-4X1300 Slitting LineTjОценок пока нет