Вам также может понравиться
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetОт EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetОценок пока нет
- PElabmanual (Fall 2022)Документ32 страницыPElabmanual (Fall 2022)Qurat Ul AinОценок пока нет
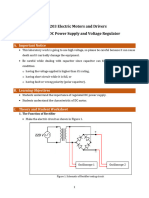
- 2022 - Electric Motors and Drivers - Module 2Документ6 страниц2022 - Electric Motors and Drivers - Module 2Ammarul NafikОценок пока нет
- Automatic Voltage Regulation AimДокумент5 страницAutomatic Voltage Regulation AimFazle RabbiОценок пока нет
- Total 363 Lab ManualДокумент67 страницTotal 363 Lab ManualBisal Sarker JoyОценок пока нет
- A.C. Motor Protection and Faults AimДокумент18 страницA.C. Motor Protection and Faults Aimapi-3701567Оценок пока нет
- 3350904-Microprocessor and Controller Applications Date: - / - / - Experiment No-02Документ3 страницы3350904-Microprocessor and Controller Applications Date: - / - / - Experiment No-02Ashfaq QureshiОценок пока нет
- PhET - Electric Circuits - Virtual LabДокумент5 страницPhET - Electric Circuits - Virtual LabKelvin SmithОценок пока нет
- 3330905-Electronic Components and CircuitsДокумент8 страниц3330905-Electronic Components and CircuitsELEОценок пока нет
- Ac DC Motor Generator Set Model Ipc-2100-MgДокумент52 страницыAc DC Motor Generator Set Model Ipc-2100-MgAhsanОценок пока нет
- Stepping Motor Control CircuitsДокумент9 страницStepping Motor Control CircuitsrfcbaccaratОценок пока нет
- AC Drives Regenerative Braking CircuitsДокумент4 страницыAC Drives Regenerative Braking CircuitsGualaОценок пока нет
- Voltage Regulator StabilityДокумент17 страницVoltage Regulator StabilityMohamed RashidОценок пока нет
- PDFДокумент46 страницPDFعبداللہ اللہ کا بندہОценок пока нет
- Why Use Power System Stabilizers?: by Richard C. Schaefer and Michael J. Basler Basler ElectricДокумент20 страницWhy Use Power System Stabilizers?: by Richard C. Schaefer and Michael J. Basler Basler Electriciipmnpti iipmОценок пока нет
- 2022 - Electric Motors and Drivers - Module 3Документ11 страниц2022 - Electric Motors and Drivers - Module 3Ammarul NafikОценок пока нет
- A Novel Simple Reliability Enhancement Switching Topology For Single Phase Buck-Boost InverterДокумент7 страницA Novel Simple Reliability Enhancement Switching Topology For Single Phase Buck-Boost InverterAabid KhanОценок пока нет
- Automatic Voltage RegulatorДокумент8 страницAutomatic Voltage Regulatoradhyartha100% (1)
- EEE363 (Exp 1) Study of The Open Circuit Characteristics (OCC) of Separately Excited DC Shunt GeneratorДокумент5 страницEEE363 (Exp 1) Study of The Open Circuit Characteristics (OCC) of Separately Excited DC Shunt Generatorsalad.ass420420Оценок пока нет
- Lab 6 Kawalan MotorДокумент20 страницLab 6 Kawalan MotorMohd FiqrieОценок пока нет
- Simple Design Criteria of Injection Transformer For The Dynamic Voltage RestorerДокумент4 страницыSimple Design Criteria of Injection Transformer For The Dynamic Voltage RestorerSyed Wajahat AliОценок пока нет
- AUTO CONTROLLER FOR PETROL (Revised)Документ25 страницAUTO CONTROLLER FOR PETROL (Revised)Hamed RazaОценок пока нет
- Electroestimulador Mettler - ME200 ServiceДокумент13 страницElectroestimulador Mettler - ME200 ServicedanielОценок пока нет
- Servo Controlled Automatic Voltage Stabilizer With Higher & Lower Cut-OffДокумент3 страницыServo Controlled Automatic Voltage Stabilizer With Higher & Lower Cut-OffEditor IJRITCCОценок пока нет
- Study For The Performance of High Speed Switchgear For Protection of In-House Generation SystemДокумент5 страницStudy For The Performance of High Speed Switchgear For Protection of In-House Generation SystemDr Vijaya Kumar JОценок пока нет
- Power Swing Detection v1.1Документ29 страницPower Swing Detection v1.1hathanhchinh2279Оценок пока нет
- 3-Phase Transformer PhasingДокумент26 страниц3-Phase Transformer PhasingEthan HuntОценок пока нет
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryДокумент6 страницExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalОценок пока нет
- Stadyne GovornorДокумент4 страницыStadyne GovornorM. ShaatОценок пока нет
- Presentation - AC GENERATOR - AVRДокумент11 страницPresentation - AC GENERATOR - AVRFidoОценок пока нет
- Jvs Manual JRC 122-124Документ4 страницыJvs Manual JRC 122-124ashutosh2009Оценок пока нет
- Design & Implementation of Cost Effective Automatic Transfer SwitchДокумент10 страницDesign & Implementation of Cost Effective Automatic Transfer SwitchAdeel ArshadОценок пока нет
- GTU ProtectДокумент15 страницGTU ProtectFaisal100% (1)
- Practical 6 Star Delta StarterДокумент4 страницыPractical 6 Star Delta StarterMohammad Nurayzat Johari50% (2)
- Fault Detection Isolation and Restoration On The Feeder (Fdir) : Pick Your TechnologyДокумент8 страницFault Detection Isolation and Restoration On The Feeder (Fdir) : Pick Your TechnologyLatha KandasamyОценок пока нет
- Cts and Vts TheoryДокумент20 страницCts and Vts Theorymvpradeep87Оценок пока нет
- Pe Lab Experiment 23Документ22 страницыPe Lab Experiment 23Jomel CanalesОценок пока нет
- Emotron Frequency Inverter Vsa Quick Start Guide 01-3991-11 r3 MultilingualДокумент176 страницEmotron Frequency Inverter Vsa Quick Start Guide 01-3991-11 r3 MultilingualRenato MirandaОценок пока нет
- Ece421hw04 AbmДокумент23 страницыEce421hw04 AbmArturo BarradasОценок пока нет
- Thyristor Power Controller: B DI1002 V1.0 Manual/Operating InstructionsДокумент12 страницThyristor Power Controller: B DI1002 V1.0 Manual/Operating InstructionsZaini DalimusОценок пока нет
- 61 - DieselEngine Black StartДокумент12 страниц61 - DieselEngine Black StartLincoln Eng100% (1)
- Short 74 Power Swing DetectionДокумент29 страницShort 74 Power Swing Detectionpriyanka236Оценок пока нет
- A Soft Stater of Three Phase Asynchronous MotorДокумент5 страницA Soft Stater of Three Phase Asynchronous MotorAl Bajad MamadОценок пока нет
- Oly Changeover SystemsДокумент5 страницOly Changeover SystemsCandiano PopescuОценок пока нет
- Ec221 Lab04 PDFДокумент5 страницEc221 Lab04 PDFishara karunarathnaОценок пока нет
- Lab Manual Switchgear and Protection SapДокумент46 страницLab Manual Switchgear and Protection SapYash MaheshwariОценок пока нет
- 119 1460963615 - 18-04-2016 PDFДокумент4 страницы119 1460963615 - 18-04-2016 PDFEditor IJRITCCОценок пока нет
- ElectricalДокумент8 страницElectricalArun UnbeatableОценок пока нет
- Experiment No. 3 Title: To Understand The Operation of Under Voltage RelayДокумент5 страницExperiment No. 3 Title: To Understand The Operation of Under Voltage RelayMuniba FatimaОценок пока нет
- Power System II Lab ManualДокумент20 страницPower System II Lab ManualPrasenjit Dey100% (1)
- Benn Machine Lab ManualДокумент14 страницBenn Machine Lab ManualRahatullah Khan100% (1)
- C6.6 ENGINE - GENERATOR SET Operation & Maintenance Manuals - PARALLEL OPERATIONДокумент4 страницыC6.6 ENGINE - GENERATOR SET Operation & Maintenance Manuals - PARALLEL OPERATIONsuperteffyОценок пока нет
- Performance Analysis of Closed Loop and Open Loop Control Methods in Dynamic Voltage RestorerДокумент4 страницыPerformance Analysis of Closed Loop and Open Loop Control Methods in Dynamic Voltage RestorerInnovative Research PublicationsОценок пока нет
- Design and Results of Differential Relay Settings For Power Transformers 80MVA, 40MVA and 100MVAДокумент3 страницыDesign and Results of Differential Relay Settings For Power Transformers 80MVA, 40MVA and 100MVAMatthew Wong100% (1)
- Student Notes - Module7 - New PDFДокумент9 страницStudent Notes - Module7 - New PDFDeepak SinghОценок пока нет
- Ace 5000Документ43 страницыAce 5000Juan Sánchez LópezОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОт EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОценок пока нет
- Welding Course ManualДокумент68 страницWelding Course Manualapi-3701567Оценок пока нет
- BatteriesДокумент23 страницыBatteriesapi-3701567100% (2)
- Air Circuit Breaker and Generator ProtectionДокумент10 страницAir Circuit Breaker and Generator Protectionapi-3701567Оценок пока нет
- Sewage Treatment Plant: MD - ShamsuzzamanДокумент11 страницSewage Treatment Plant: MD - Shamsuzzamanapi-3701567100% (3)
- Oil Water Separator (OWS)Документ11 страницOil Water Separator (OWS)api-3701567100% (1)
- PumpsДокумент26 страницPumpsrajishrrrОценок пока нет
- Parallel Operation of AlternatorsДокумент12 страницParallel Operation of Alternatorsapi-3701567Оценок пока нет
- Ac GeneratorsДокумент7 страницAc Generatorsஆரமுதன் கருணாகரன்Оценок пока нет
- 1 Semiconductors 02Документ1 страница1 Semiconductors 02api-3701567Оценок пока нет
- Effect of Low Sulphur FuelДокумент2 страницыEffect of Low Sulphur Fuelapi-3701567Оценок пока нет
- Microbial ContaminationДокумент2 страницыMicrobial Contaminationapi-3701567Оценок пока нет
- Three-Phase A.C. Motor Starters AIMДокумент11 страницThree-Phase A.C. Motor Starters AIMapi-3701567Оценок пока нет
- Bearing MetalsДокумент1 страницаBearing Metalsapi-3701567Оценок пока нет
- 1995, and To Video VC682 Part 1 For DetailsДокумент5 страниц1995, and To Video VC682 Part 1 For Detailsapi-3701567Оценок пока нет
- General Bearing Requirements and Design CriteriaДокумент6 страницGeneral Bearing Requirements and Design Criteriaapi-3701567100% (2)
- Crosshead With Connecting Rod PurposeДокумент14 страницCrosshead With Connecting Rod Purposeapi-3701567100% (9)
- Lubricating Oil Purification TestingДокумент9 страницLubricating Oil Purification Testingapi-3701567Оценок пока нет
- Cylinder Lubrication Timed InjectionДокумент6 страницCylinder Lubrication Timed Injectionapi-3701567Оценок пока нет
- BearingsДокумент4 страницыBearingsaloordominicОценок пока нет
- Microbes in Lub OilДокумент1 страницаMicrobes in Lub Oilapi-3701567Оценок пока нет
- GreaseДокумент1 страницаGreaseapi-3701567Оценок пока нет
- Lubricating OilДокумент1 страницаLubricating Oilapi-3701567Оценок пока нет
- Function of A Lubricant: Ref To Page 48 Diesel Engines 3rd Edition, A J WhartonДокумент11 страницFunction of A Lubricant: Ref To Page 48 Diesel Engines 3rd Edition, A J Whartonapi-3701567Оценок пока нет
- Scavenge Fires: Rajan Bhandari Senior Lecturer Singapore Maritime AcdemyДокумент12 страницScavenge Fires: Rajan Bhandari Senior Lecturer Singapore Maritime Acdemyapi-3701567Оценок пока нет
- Crankcase Relief DoorДокумент7 страницCrankcase Relief Doorapi-3701567Оценок пока нет
- Inlet & Exhaust Valves & Actuating MechanismДокумент42 страницыInlet & Exhaust Valves & Actuating Mechanismapi-3701567Оценок пока нет
- Resin ChockДокумент9 страницResin Chockapi-3701567Оценок пока нет
- Oil Mist DetectorДокумент9 страницOil Mist Detectorapi-3701567100% (1)
- Manufacturing Systems-Fleximble Manufacturing Application-Case Study of ZimbabweДокумент5 страницManufacturing Systems-Fleximble Manufacturing Application-Case Study of Zimbabwejosphat muchatutaОценок пока нет
- Odisha Current Affairs 2019 by AffairsCloudДокумент27 страницOdisha Current Affairs 2019 by AffairsCloudTANVEER AHMEDОценок пока нет
- Aadhaar Application FormДокумент4 страницыAadhaar Application Formpan cardОценок пока нет
- Commercial Drone Industry Trends: Dronedeploy - May 2018Документ14 страницCommercial Drone Industry Trends: Dronedeploy - May 2018minus2738602Оценок пока нет
- Building Materials Reuse and RecycleДокумент10 страницBuilding Materials Reuse and RecyclemymalvernОценок пока нет
- 4 MivДокумент19 страниц4 Mivpavankumar001Оценок пока нет
- How To Export Resource Assignment Data To Excel From P6Документ9 страницHow To Export Resource Assignment Data To Excel From P6artletОценок пока нет
- 3.1 Turbine and GoverningДокумент90 страниц3.1 Turbine and GoverningYudo Heru PribadiОценок пока нет
- BTICINO Catalog Matix PDFДокумент80 страницBTICINO Catalog Matix PDFsokolobanОценок пока нет
- New Generation Shaft KilnДокумент2 страницыNew Generation Shaft Kilndocument nugrohoОценок пока нет
- RGNQA Parameters ConsolidatedДокумент186 страницRGNQA Parameters ConsolidatedpendialaОценок пока нет
- Relay Performance Testing: Jay Gosalia Vice President of Engineering and Marketing Doble Engineering Company, USAДокумент40 страницRelay Performance Testing: Jay Gosalia Vice President of Engineering and Marketing Doble Engineering Company, USArashid rahmanОценок пока нет
- PDFДокумент2 страницыPDFSalim AshorОценок пока нет
- Hydraulic BrakeДокумент29 страницHydraulic Brakerup_ranjan532250% (8)
- Unit 2Документ3 страницыUnit 2lewlking123Оценок пока нет
- Pre-Disciplinary and Post-Disciplinary Perspectives: Bob Jessop & Ngai-Ling SumДокумент13 страницPre-Disciplinary and Post-Disciplinary Perspectives: Bob Jessop & Ngai-Ling SumMc_RivОценок пока нет
- EV 10 Best Practice - Implementing Enterprise Vault On VMware (January 2012)Документ31 страницаEV 10 Best Practice - Implementing Enterprise Vault On VMware (January 2012)TekkieОценок пока нет
- TWITCH INTERACTIVE, INC. v. JOHN AND JANE DOES 1-100Документ18 страницTWITCH INTERACTIVE, INC. v. JOHN AND JANE DOES 1-100PolygondotcomОценок пока нет
- 5th Issue October 10Документ12 страниц5th Issue October 10The TartanОценок пока нет
- Alternator LSA42.3j enДокумент12 страницAlternator LSA42.3j enArdi Wiranata PermadiОценок пока нет
- Assessment PlanДокумент2 страницыAssessment Planapi-282348214Оценок пока нет
- Rukovodstvo Atlas Copco Xahs 447 CDДокумент99 страницRukovodstvo Atlas Copco Xahs 447 CDradamantus100% (1)
- How Write A Better EmailДокумент77 страницHow Write A Better EmailgnpatelОценок пока нет
- McGraw-Hill (Level 1) PDFДокумент41 страницаMcGraw-Hill (Level 1) PDFDarpan GajjarОценок пока нет
- Ruth Clark ResumeДокумент2 страницыRuth Clark Resumeapi-288708541Оценок пока нет
- Muse Score 3Документ246 страницMuse Score 3lejuan0Оценок пока нет
- Sense Amplifier For SRAMДокумент28 страницSense Amplifier For SRAMPrateek AgrawalОценок пока нет
- Amerisolar Ficha TecnicaДокумент2 страницыAmerisolar Ficha Tecnicapepo222Оценок пока нет
- McbcomДокумент72 страницыMcbcomopenjavier5208Оценок пока нет
- (L4) - (JLD 3.0) - Semiconductors - 30th DecДокумент66 страниц(L4) - (JLD 3.0) - Semiconductors - 30th DecAshfaq khanОценок пока нет