Вам также может понравиться
- WK 03Документ2 страницыWK 03Ravi TejОценок пока нет
- Oradea: Bucharest Arad CraiovaДокумент53 страницыOradea: Bucharest Arad CraiovaSamari JadeОценок пока нет
- Informed Search Algorithms: Chapter 3, Sections 5-6Документ24 страницыInformed Search Algorithms: Chapter 3, Sections 5-6SridharОценок пока нет
- Search Tutorial COMP3620Документ4 страницыSearch Tutorial COMP3620scribd_jayОценок пока нет
- A Star SearchДокумент56 страницA Star SearchAnonymous pEjvosqОценок пока нет
- Midterm Exam KeyДокумент7 страницMidterm Exam KeySumiah AlalwaniОценок пока нет
- Informed Search and ExplorationДокумент51 страницаInformed Search and ExplorationMinh ĐặngОценок пока нет
- Lect03 Problem Solving by SearchingДокумент34 страницыLect03 Problem Solving by SearchingTrương Thuận KiệtОценок пока нет
- Homework 2Документ5 страницHomework 2Akanksha GundОценок пока нет
- Chap 3 A Basic SearchДокумент36 страницChap 3 A Basic SearchRushikesh GhatageОценок пока нет
- Sibiu Timisoara: Level Open List Goal/Test Close ListДокумент2 страницыSibiu Timisoara: Level Open List Goal/Test Close ListErcherio MarpaungОценок пока нет
- Lect03 Informed SearchДокумент70 страницLect03 Informed SearchTrương Thuận KiệtОценок пока нет
- Chapter03 PDFДокумент63 страницыChapter03 PDFGoutham Surya ArukondaОценок пока нет
- Analyst Presentation FY 2020-21Документ40 страницAnalyst Presentation FY 2020-21Rahul Kumar VishwakarmaОценок пока нет
- GamaralDecanter World Wine Awards 2018 Special - August 2018Документ247 страницGamaralDecanter World Wine Awards 2018 Special - August 2018germano machado100% (2)
- PharmD Meritist2023BBSULKДокумент2 страницыPharmD Meritist2023BBSULKRaees AhmedОценок пока нет
- A331 PlantДокумент821 страницаA331 Plantchandu666creatorОценок пока нет
- Aircraft Movement For Cy 2018: UpdatedДокумент10 страницAircraft Movement For Cy 2018: UpdatedKhristian SamalaОценок пока нет
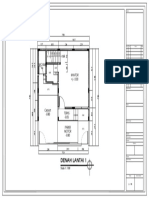
- Denah Lantai 1: Naik WC/KM KantorДокумент1 страницаDenah Lantai 1: Naik WC/KM KantorKinoy KirsamОценок пока нет
- Gasbill 4800349743 202403 20240315011615Документ1 страницаGasbill 4800349743 202403 20240315011615uzairabbasi96098Оценок пока нет
- Allowable Uniform Load Capacity (PSF) On SheathingДокумент1 страницаAllowable Uniform Load Capacity (PSF) On SheathingAgustin DellepianeОценок пока нет
- IndxДокумент29 страницIndxSunyong SimlongОценок пока нет
- NHPC 23Документ1 страницаNHPC 23V thiajrajanОценок пока нет
- Chapter 03Документ74 страницыChapter 03api-3705912Оценок пока нет
- Staff Count - Pan IndiaДокумент1 страницаStaff Count - Pan IndiaAabidd BangiОценок пока нет
- CoiledTubing For Downhole Applications (Tenaris)Документ24 страницыCoiledTubing For Downhole Applications (Tenaris)William EvansОценок пока нет
- KITCHNДокумент8 страницKITCHNALOCITA MANDIRIОценок пока нет
- Final RateДокумент2 страницыFinal Ratemin100% (2)
- Intro To Oil and Gas Piping EngineeringДокумент29 страницIntro To Oil and Gas Piping Engineeringkeen dela cruzОценок пока нет
- Hill Climbing MethodsДокумент14 страницHill Climbing Methodsapi-370591280% (5)
- Chapter 03Документ74 страницыChapter 03api-3705912Оценок пока нет
- Hill Climbing 1st in ClassДокумент32 страницыHill Climbing 1st in Classapi-3705912Оценок пока нет
- m2 AgentsДокумент28 страницm2 Agentsapi-3705912Оценок пока нет
- Hill Climbing AlgorithmДокумент49 страницHill Climbing AlgorithmSafdar JafriОценок пока нет
- Chapter 01Документ27 страницChapter 01api-3705912Оценок пока нет
- m1 IntroДокумент13 страницm1 Introapoorva96Оценок пока нет
- CS DebonairДокумент1 страницаCS Debonairapi-3705912Оценок пока нет
- HTMLДокумент1 страницаHTMLapi-3705912Оценок пока нет
- Complete RecordДокумент73 страницыComplete Recordapi-3705912100% (1)
- CrosswordДокумент1 страницаCrosswordapi-3705912Оценок пока нет
- ConundrumsДокумент1 страницаConundrumsapi-3705912Оценок пока нет
- Buzz Around UzzДокумент2 страницыBuzz Around Uzzapi-3705912Оценок пока нет
- How To Configure UWLДокумент22 страницыHow To Configure UWLNatalya BindeyОценок пока нет
- PHP Assignment Part 2Документ34 страницыPHP Assignment Part 2Priyanshu BakshiОценок пока нет
- Research Paper - Map Reduce - CSC3323Документ16 страницResearch Paper - Map Reduce - CSC3323AliElabridiОценок пока нет
- Industrial Training Report For Btech Information Technology On JAVAДокумент34 страницыIndustrial Training Report For Btech Information Technology On JAVAdinesh sainee75% (4)
- LightgrepДокумент17 страницLightgrepshafghp100% (1)
- Experiment: 5 Object: Find All The Code Words of The (15,11) Hamming Code and VerifyДокумент2 страницыExperiment: 5 Object: Find All The Code Words of The (15,11) Hamming Code and VerifyKamleshОценок пока нет
- Bilal Mohammad Resume FinalДокумент1 страницаBilal Mohammad Resume FinalBilal MohammadОценок пока нет
- Unit 2Документ55 страницUnit 2Vaibhav HiwaseОценок пока нет
- CST1340 - Week 2 - GOALsДокумент4 страницыCST1340 - Week 2 - GOALsmohdamaankhan.workОценок пока нет
- CBLM Programming NC IVДокумент13 страницCBLM Programming NC IVownlinkscribdОценок пока нет
- Arithmetic Operators: Explain Different Types of Operators in PHP?Документ9 страницArithmetic Operators: Explain Different Types of Operators in PHP?tulika konarОценок пока нет
- 236 1565 1 PBДокумент9 страниц236 1565 1 PBtian meОценок пока нет
- Ref Cursor Strong WeakДокумент7 страницRef Cursor Strong Weakdipson234Оценок пока нет
- What Is Internet?Документ2 страницыWhat Is Internet?Viji KannanОценок пока нет
- Some Important SQL+DBMSДокумент19 страницSome Important SQL+DBMSSaloni JainОценок пока нет
- ) Power System Analysis Toolbox (Документ29 страниц) Power System Analysis Toolbox (Mustadir Darusman B100% (1)
- Autodesk Inventor Ilogic Basic TutorialДокумент33 страницыAutodesk Inventor Ilogic Basic TutorialJW100% (2)
- Chap-4, 5,6,7Документ19 страницChap-4, 5,6,7EmanОценок пока нет
- Abx Horiba Yumizen p8000Документ48 страницAbx Horiba Yumizen p8000medali_elghazelОценок пока нет
- Programming Logic and Design: Ninth EditionДокумент49 страницProgramming Logic and Design: Ninth EditionBry CamelОценок пока нет
- Lecture-3 Problems Solving by SearchingДокумент79 страницLecture-3 Problems Solving by SearchingmusaОценок пока нет
- Python Cheat Sheet: by ViaДокумент2 страницыPython Cheat Sheet: by ViaDavid BumphisОценок пока нет
- Python Question PaperДокумент2 страницыPython Question PaperHemanth CОценок пока нет
- Web MLДокумент14 страницWeb MLJoel Emerson Rojas SolizОценок пока нет
- Outsystems Enterprise Architect Ebook FinalДокумент24 страницыOutsystems Enterprise Architect Ebook FinalAnh NguyenОценок пока нет
- CPM & PertДокумент13 страницCPM & PertRamdayal pandit RamdayalОценок пока нет
- SAP Adobe Interactive Form Tutorial - Parte 5Документ15 страницSAP Adobe Interactive Form Tutorial - Parte 5Elkin OcampoОценок пока нет
- Using Oracle FastFormula For Payroll CalculationsДокумент10 страницUsing Oracle FastFormula For Payroll CalculationsAmjad Al-berawi0% (1)
- Oracle SQL Sat PDFДокумент89 страницOracle SQL Sat PDFMudassir IslamОценок пока нет
- SysFileAsync V3x EДокумент6 страницSysFileAsync V3x Emuhamad.badar9285Оценок пока нет