Вам также может понравиться
- Dimensionamento de vigas e colunas de açoДокумент26 страницDimensionamento de vigas e colunas de açoMCMBOSОценок пока нет
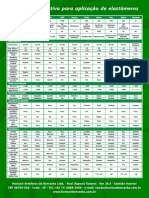
- Comparativo de elastômeros para aplicaçõesДокумент1 страницаComparativo de elastômeros para aplicaçõesandrebitaОценок пока нет
- Comprovantes de Pagamento e Nova CobrançaДокумент1 страницаComprovantes de Pagamento e Nova CobrançaFábio NeryОценок пока нет
- Apostila CLP TecnologoДокумент53 страницыApostila CLP TecnologoWanderley Terci EstevesОценок пока нет
- Manual Actígrafo ACT1 R1Документ34 страницыManual Actígrafo ACT1 R1Kelly MartuchelliОценок пока нет
- Aula 1 - Introducao SOДокумент30 страницAula 1 - Introducao SOJosé SouzaОценок пока нет
- Informática - Dicas Livros TécnicosДокумент4 страницыInformática - Dicas Livros TécnicosInforma100% (2)
- Gilberto Dupas - Ética e Poder Na Sociedade de InformaçãoДокумент71 страницаGilberto Dupas - Ética e Poder Na Sociedade de InformaçãoAdeylson Lichtenheld Craus Bertuani83% (6)
- MicroStation 2D CAD GuideДокумент56 страницMicroStation 2D CAD GuidesandreazoОценок пока нет
- Manual SISPED PDAДокумент9 страницManual SISPED PDAGuilherme CamargoОценок пока нет
- Exercícios Software LinuxДокумент8 страницExercícios Software LinuxJackson LiraОценок пока нет
- Modulo 2Документ44 страницыModulo 2Ana AlmeidaОценок пока нет
- Piratas Do Vale Do SilícioДокумент2 страницыPiratas Do Vale Do Silícioregiana machadoОценок пока нет
- 9 Ferramentas de Manutenção Essenciais para Qualquer Profissional de TI (Completo)Документ3 страницы9 Ferramentas de Manutenção Essenciais para Qualquer Profissional de TI (Completo)NT StrifeОценок пока нет
- NARMCEIДокумент91 страницаNARMCEIAurelioОценок пока нет
- ComAlt Recurso EducaçãoДокумент6 страницComAlt Recurso EducaçãoAndrio PintoОценок пока нет
- 04 Arquitetura Cliente ServidorДокумент25 страниц04 Arquitetura Cliente ServidorAnderson FelgueirasОценок пока нет
- Manual de Uso - BilirrubinometroДокумент130 страницManual de Uso - BilirrubinometroThiago GagoreОценок пока нет
- Mouse gamer Logitech G403 HERO com sensor HERO 25K e iluminação RGBДокумент1 страницаMouse gamer Logitech G403 HERO com sensor HERO 25K e iluminação RGBEmmanuel Hudyson0% (1)
- Registrador de dados LogBox-AAДокумент9 страницRegistrador de dados LogBox-AAEverson DantasОценок пока нет
- Instalação e configuração de servidoresДокумент3 страницыInstalação e configuração de servidoresnerio watОценок пока нет
- Funções principais de um Sistema OperacionalДокумент16 страницFunções principais de um Sistema OperacionalAlexandre Maciel100% (1)
- Introdução ao desenvolvimento de programas em COBOLДокумент33 страницыIntrodução ao desenvolvimento de programas em COBOLThiago Sales RibeiroОценок пока нет
- As Teorias Da Cibercultura PerspectivasДокумент324 страницыAs Teorias Da Cibercultura Perspectivasrodrigo50% (2)
- CASO DELL - Cadeia de Suprimentos de ComputadoresДокумент2 страницыCASO DELL - Cadeia de Suprimentos de ComputadoresFabio Andre NassОценок пока нет
- Epson Expression Home XP 202 Ficha de ProdutoДокумент2 страницыEpson Expression Home XP 202 Ficha de ProdutoRicardo MoreiraОценок пока нет
- 13 Passos para Configurar Seu Roteador Wireless em Modo Access Point (Ponto de Acesso) - MUndo ZoOMДокумент31 страница13 Passos para Configurar Seu Roteador Wireless em Modo Access Point (Ponto de Acesso) - MUndo ZoOMmarcioalex2Оценок пока нет
- UC8.Instalação e Manutenção de Periféricos (Apostila) PDFДокумент58 страницUC8.Instalação e Manutenção de Periféricos (Apostila) PDFJúlio Carvalho100% (2)
- Evolução TecnológicaДокумент5 страницEvolução TecnológicaRosalina BarrosОценок пока нет
- Barramentos Internos e ExternosДокумент21 страницаBarramentos Internos e ExternosSancrey Rodrigues Alves50% (2)
- Tutorial Instalação Da Rotina 820 2018Документ15 страницTutorial Instalação Da Rotina 820 2018Lican FitОценок пока нет
- Laser v5Документ127 страницLaser v5Pedro SantosОценок пока нет
- História dos Computadores: da Abaco ao QuânticoДокумент12 страницHistória dos Computadores: da Abaco ao QuânticohermenegildoОценок пока нет
- Baseline User Manual of IVMS-4200 V2.6.1 Tailored 20170323-PTДокумент255 страницBaseline User Manual of IVMS-4200 V2.6.1 Tailored 20170323-PTEdirceu FreitasОценок пока нет