Вам также может понравиться
- ME2307 Lab ManualДокумент15 страницME2307 Lab ManualAnandhasekarОценок пока нет
- ME2307 Lab ManualДокумент15 страницME2307 Lab ManualSuresh RajuОценок пока нет
- First/Second Class Power Engineering Electrical Notes: Unit Symbol MultiplierДокумент7 страницFirst/Second Class Power Engineering Electrical Notes: Unit Symbol Multipliercowlover55Оценок пока нет
- S.NO. Topic Pages: 1. I 2. List of Figures II 3. Chapter 1 - INTRODUCTION 1Документ24 страницыS.NO. Topic Pages: 1. I 2. List of Figures II 3. Chapter 1 - INTRODUCTION 1Kabir RajputОценок пока нет
- Lecture 2: Introduction To Ordinary Differential EquationsДокумент54 страницыLecture 2: Introduction To Ordinary Differential Equationsandre_furtado_1970Оценок пока нет
- Chapter 7 Homework Solutions (All)Документ10 страницChapter 7 Homework Solutions (All)Mariana VillagomezОценок пока нет
- Line Spectrum of Atoms Different Types (Bohr'S Atoms Theory)Документ6 страницLine Spectrum of Atoms Different Types (Bohr'S Atoms Theory)Wahyudi HasanОценок пока нет
- Spectral AnalysisДокумент19 страницSpectral AnalysisPatrick SibandaОценок пока нет
- g484 Physics Newtonian World Notes Ocr Robbie PeckДокумент10 страницg484 Physics Newtonian World Notes Ocr Robbie Peckapi-236179294Оценок пока нет
- Predictive Maintainance Using Thermal ImagingДокумент28 страницPredictive Maintainance Using Thermal ImagingGeetha_Sulaksh_9338Оценок пока нет
- Chapter1 AssignmentДокумент2 страницыChapter1 Assignmentbanglangtim365Оценок пока нет
- Natural Frequencies of A Tapered Cantilever Beam of Constant Thickness and Linearly Tapered WidthДокумент9 страницNatural Frequencies of A Tapered Cantilever Beam of Constant Thickness and Linearly Tapered WidthAleksandar Nikolic100% (1)
- Technical Sheet No. Ii. B.1.3Документ16 страницTechnical Sheet No. Ii. B.1.3Popa MirceaОценок пока нет
- EENG350 Lecture Notes Ch4Документ16 страницEENG350 Lecture Notes Ch4yasmin20Оценок пока нет
- Equilibrium of Particle in 2-DДокумент47 страницEquilibrium of Particle in 2-DafiqzeroОценок пока нет
- SL - No. Topics L T P: Power System StabilityДокумент19 страницSL - No. Topics L T P: Power System StabilityMahmoud Samir MahmoudОценок пока нет
- 3 +Ok+Direct+Axis+and+Quadrature+Axis+Subtransient+ReactancesДокумент2 страницы3 +Ok+Direct+Axis+and+Quadrature+Axis+Subtransient+Reactancesnainesh goteОценок пока нет
- Lab 2: Damped Torsional Oscillations 1Документ4 страницыLab 2: Damped Torsional Oscillations 1NasirAbbasОценок пока нет
- 9.0 Motor Drives Using Mosfets: 9.1 Buck Chopper DriveДокумент12 страниц9.0 Motor Drives Using Mosfets: 9.1 Buck Chopper DriveJose AguilarОценок пока нет
- E CM KG Ee A M E V V MV M R Period T Be Be: Electronic Devices and CircuitsДокумент13 страницE CM KG Ee A M E V V MV M R Period T Be Be: Electronic Devices and Circuitskarthiha12Оценок пока нет
- Final Exam SolutionДокумент18 страницFinal Exam SolutionSalah AL-HakimiОценок пока нет
- ARGOS Surface Beacon Asb X User Manual: March 2011Документ7 страницARGOS Surface Beacon Asb X User Manual: March 2011Reza BabakhaniОценок пока нет
- Solved Problems Ch6Документ4 страницыSolved Problems Ch6Pei Kiat TanОценок пока нет
- 3 Theory of Base IsolationДокумент10 страниц3 Theory of Base IsolationPradeepLokhandeОценок пока нет
- Control System ManualДокумент34 страницыControl System Manualnirmal_inboxОценок пока нет
- Chemistry Form 4 NotesДокумент46 страницChemistry Form 4 Notessegarthana1567% (3)
- Finite Element Analyses of Seismic Responses of The Berkeley Town HouseДокумент43 страницыFinite Element Analyses of Seismic Responses of The Berkeley Town HousebashasaruОценок пока нет
- Indian Institute of Remote Sensing Edusat Based Course On RS, Gis and Gps Examination - Module 1Документ10 страницIndian Institute of Remote Sensing Edusat Based Course On RS, Gis and Gps Examination - Module 1Nitin MadeshiaОценок пока нет
- Properties Of Nλ/2 LinesДокумент12 страницProperties Of Nλ/2 LinesJunar JohnОценок пока нет
- Component SpecificationsДокумент5 страницComponent SpecificationsreddygjОценок пока нет
- Notes05 PDFДокумент66 страницNotes05 PDFShengyuan ZhongОценок пока нет
- TNPSC Assistant Engineer Exam 1998 Question Paper 1998 - CIGДокумент12 страницTNPSC Assistant Engineer Exam 1998 Question Paper 1998 - CIGnirmalramyaОценок пока нет
- R Watts. F (I, R) 12ri (1 - I) Randv RareДокумент6 страницR Watts. F (I, R) 12ri (1 - I) Randv RareHasif Sheikh AliОценок пока нет
- SECTION 16480 Motor Controllers PHAÀN 16480 Boä Ñieàu Khieån Ñoäng CôДокумент7 страницSECTION 16480 Motor Controllers PHAÀN 16480 Boä Ñieàu Khieån Ñoäng Cômeeng2014Оценок пока нет
- Chapter 6 - Jan14 New VersionДокумент131 страницаChapter 6 - Jan14 New VersionkumuthaОценок пока нет
- Lesson Vibration and Noise MeasurementДокумент56 страницLesson Vibration and Noise Measurementmister pogiОценок пока нет
- O&M Fire FightingДокумент38 страницO&M Fire FightingRajkumar Prasad100% (2)
- Response: Free or Forced in This Chapter: Free Response, I.E. No External Forces Are AppliedДокумент12 страницResponse: Free or Forced in This Chapter: Free Response, I.E. No External Forces Are AppliedTrigger DineshОценок пока нет
- Process Control Lab ManualДокумент51 страницаProcess Control Lab Manualkaushikei22100% (2)
- Unit 4 UpdatedДокумент8 страницUnit 4 UpdatedArul JOОценок пока нет
- Swinburne University of Technology: School of Engineering (Sarawak Campus)Документ19 страницSwinburne University of Technology: School of Engineering (Sarawak Campus)Sekut TawarОценок пока нет
- (Ref. Code: ME/LM/HTHP/R00) : Centurion Institute of TechnologyДокумент79 страниц(Ref. Code: ME/LM/HTHP/R00) : Centurion Institute of TechnologyNabin Chandra SahuОценок пока нет
- Basic InstrumentionДокумент25 страницBasic InstrumentionVijay SharmaОценок пока нет
- Lab1 MicrosДокумент39 страницLab1 MicrosBen LongОценок пока нет
- Electric Machines I (ةيبرهك ت لآ 1 (121 Sample Final Exam Spring 2007 Instructor: ضياع.م دمح يناطحقلاДокумент9 страницElectric Machines I (ةيبرهك ت لآ 1 (121 Sample Final Exam Spring 2007 Instructor: ضياع.م دمح يناطحقلاAhas AlqОценок пока нет
- Orthogonality: A X A Sin A X AДокумент7 страницOrthogonality: A X A Sin A X Ashimo1992Оценок пока нет
- Matriculation Physics Physical OpticsДокумент130 страницMatriculation Physics Physical Opticsiki292Оценок пока нет
- Sampling and Reconstruction: Analog System Discrete-Time SystemДокумент6 страницSampling and Reconstruction: Analog System Discrete-Time SystemRahul KrishnanОценок пока нет
- WJ59FF (Wuxi Wenjiao Free Fall Lifeboat)Документ33 страницыWJ59FF (Wuxi Wenjiao Free Fall Lifeboat)abu_shofiaОценок пока нет
- Earthing Transformers For Power SystemsДокумент11 страницEarthing Transformers For Power Systemsking_electricalОценок пока нет
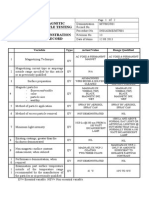
- Magnetic Particle Testing Demonstration Record: International Inspection Services LTD - PO Box 96535 Dubai. UAEДокумент2 страницыMagnetic Particle Testing Demonstration Record: International Inspection Services LTD - PO Box 96535 Dubai. UAESantanu SahaОценок пока нет
- Noninvasive Blood Pressure Measurement Methods - 239-264 - Sorvoja - MyllylaДокумент26 страницNoninvasive Blood Pressure Measurement Methods - 239-264 - Sorvoja - MyllylaJocemar GodoyОценок пока нет
- Intra-Frequency Cell Reselection Parameters Specification: Huawei HuaweiДокумент5 страницIntra-Frequency Cell Reselection Parameters Specification: Huawei HuaweiTariq MuhammadОценок пока нет
- Tutorial: Physics Panel SMSSIДокумент33 страницыTutorial: Physics Panel SMSSIMNYОценок пока нет
- B.E./ B.Tech. Degree Examination, May / June 2009 Sixth Semester Electrical and Electronics EngineeringДокумент3 страницыB.E./ B.Tech. Degree Examination, May / June 2009 Sixth Semester Electrical and Electronics EngineeringbhaviasekarОценок пока нет
- Ion Beams for Materials AnalysisОт EverandIon Beams for Materials AnalysisR. Curtis BirdОценок пока нет
- An Introduction to Equilibrium Thermodynamics: Pergamon Unified Engineering SeriesОт EverandAn Introduction to Equilibrium Thermodynamics: Pergamon Unified Engineering SeriesОценок пока нет
- Critical Survey of Stability Constants of EDTA Complexes: Critical Evaluation of Equilibrium Constants in Solution: Stability Constants of Metal ComplexesОт EverandCritical Survey of Stability Constants of EDTA Complexes: Critical Evaluation of Equilibrium Constants in Solution: Stability Constants of Metal ComplexesОценок пока нет
- Electronic Circuit Design Ideas: Edn Series for Design EngineersОт EverandElectronic Circuit Design Ideas: Edn Series for Design EngineersРейтинг: 5 из 5 звезд5/5 (2)
- Measurement Instruments and ToolsДокумент91 страницаMeasurement Instruments and ToolsNishanth Shannmugam100% (2)
- Precision MeasurementДокумент39 страницPrecision MeasurementNishanth Shannmugam100% (1)
- ME2308 Lab ManualДокумент28 страницME2308 Lab ManualNishanth ShannmugamОценок пока нет
- TMMДокумент11 страницTMMMANOJ MОценок пока нет
- Mechanisms 1Документ23 страницыMechanisms 1Nishanth ShannmugamОценок пока нет
- Solidification SlidesДокумент33 страницыSolidification SlidesNishanth ShannmugamОценок пока нет
- Computer Aided Machine Drawing Lab VivaДокумент1 страницаComputer Aided Machine Drawing Lab VivaNishanth ShannmugamОценок пока нет
- Case StudyДокумент3 страницыCase StudyNishanth ShannmugamОценок пока нет
- Silicon NitrideДокумент2 страницыSilicon NitrideNishanth ShannmugamОценок пока нет
- Case Study2Документ10 страницCase Study2Nishanth ShannmugamОценок пока нет
- Electric Arc Furnace ModelingДокумент6 страницElectric Arc Furnace ModelingDanialMdNoorОценок пока нет
- R5310204-Power ElectronicsДокумент4 страницыR5310204-Power ElectronicssivabharathamurthyОценок пока нет
- Statics Assgnmnt)Документ20 страницStatics Assgnmnt)Mohammed AdemОценок пока нет
- Equilibrium, Balance, and StabilityДокумент3 страницыEquilibrium, Balance, and StabilityAswathiОценок пока нет
- Class XI PB Question Paper Physics XIДокумент8 страницClass XI PB Question Paper Physics XIAnna creationОценок пока нет
- Protection of MVDC Distribution SystemДокумент13 страницProtection of MVDC Distribution SystemMaqsood AhmadОценок пока нет
- 损伤力学教程 勒迈特Документ293 страницы损伤力学教程 勒迈特曹斯厚Оценок пока нет
- VOL 5 Pulse GeneratorsДокумент755 страницVOL 5 Pulse Generatorsgorods5rtОценок пока нет
- SSC JE Electrical SyllabusДокумент4 страницыSSC JE Electrical SyllabusHarpal SainiОценок пока нет
- Nuclear Physics and Reactor Theory Vol 1 and 2Документ245 страницNuclear Physics and Reactor Theory Vol 1 and 2kollliОценок пока нет
- Basic Operations With Force Systems: 1. Fixed VectorДокумент6 страницBasic Operations With Force Systems: 1. Fixed VectorAaron Jet AndresОценок пока нет
- Malla Reddy Engineering College: B. Tech. Iv Semester (Mr15) Regular End ExaminationsДокумент2 страницыMalla Reddy Engineering College: B. Tech. Iv Semester (Mr15) Regular End ExaminationsNaresh KumarОценок пока нет
- Fluid KinematicsДокумент14 страницFluid KinematicsRavi KantОценок пока нет
- Summer Training Report On Unnao Sub Station PDFДокумент59 страницSummer Training Report On Unnao Sub Station PDFAnubhav SachanОценок пока нет
- HCI634KДокумент8 страницHCI634KNos GoteОценок пока нет
- PI-200, PI-400, PI-750, XI41B: Models / ModelosДокумент31 страницаPI-200, PI-400, PI-750, XI41B: Models / ModelosRolando MaasОценок пока нет
- ECE2 The Second Paradigm ShiftДокумент376 страницECE2 The Second Paradigm ShiftSister RosettaОценок пока нет
- A Detailed Lesson Plan in Science 10 - EM-WAVESДокумент12 страницA Detailed Lesson Plan in Science 10 - EM-WAVESCyril Cauilan100% (2)
- Chap 01 Class Lecture For StudentsДокумент76 страницChap 01 Class Lecture For StudentsMaslinda Mat SharifОценок пока нет
- Worksheet ForcesnnДокумент2 страницыWorksheet ForcesnnSyanet WaronganОценок пока нет
- Kelvin Bridge: 2 Principle of OperationДокумент3 страницыKelvin Bridge: 2 Principle of OperationDen AdenОценок пока нет
- Transformer in Three-Phase LLC Resonant ConverterДокумент16 страницTransformer in Three-Phase LLC Resonant ConverterNhật Đào QuốcОценок пока нет
- 0625 s08 QP 2Документ6 страниц0625 s08 QP 2Ahmed Hany ElGezawyОценок пока нет
- Pruefanweisung Generator Reihe 40xx DWG EnglischДокумент2 страницыPruefanweisung Generator Reihe 40xx DWG Englischmartin_powell_15Оценок пока нет
- Battery TenderДокумент2 страницыBattery TenderEduardo VicoОценок пока нет
- 5.0amp Schottky Barrier Rectifiers: Voltage Range FeaturesДокумент2 страницы5.0amp Schottky Barrier Rectifiers: Voltage Range Featuresيوكي آنى سانОценок пока нет
- ECT2000 English+MANUAL PDFДокумент27 страницECT2000 English+MANUAL PDFHector DiazОценок пока нет
- Digital Panel MeterДокумент11 страницDigital Panel Meterkbl11794Оценок пока нет
- Ee6351 Electrical Drives and Control 2 MДокумент40 страницEe6351 Electrical Drives and Control 2 Mbekalu tarekegnОценок пока нет
- LS Cast Resin Transformers: Technical PerformanceДокумент16 страницLS Cast Resin Transformers: Technical PerformanceSayemAbusadat100% (1)