Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Checkpoint Services: Application Program InterfaceДокумент17 страницCheckpoint Services: Application Program Interfacegame___overОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- NS3 TutorialДокумент46 страницNS3 TutorialahmedabdullaОценок пока нет
- Openmtc: M2M Solutions For Smart Cities and The Internet of ThingsДокумент7 страницOpenmtc: M2M Solutions For Smart Cities and The Internet of Thingsgame___overОценок пока нет
- Maam Ss 0017Документ3 страницыMaam Ss 0017game___overОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- 05 Challenges of LTE Advance Rel10 13Документ75 страниц05 Challenges of LTE Advance Rel10 13game___overОценок пока нет
- Specification: 1. HousingДокумент2 страницыSpecification: 1. Housinggame___overОценок пока нет
- 140 MHZ Bandpass Filter 19.4 MHZ Bandwidth Sf0140Cf1Xxxxt: Part NumberДокумент2 страницы140 MHZ Bandpass Filter 19.4 MHZ Bandwidth Sf0140Cf1Xxxxt: Part Numbergame___overОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- J LCB140S 20A: Top View Bottom ViewДокумент2 страницыJ LCB140S 20A: Top View Bottom Viewgame___overОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- J Lcl70A: Top View Bottom ViewДокумент2 страницыJ Lcl70A: Top View Bottom Viewgame___overОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
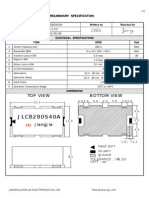
- J LCB280S 40A: Top View Bottom ViewДокумент2 страницыJ LCB280S 40A: Top View Bottom Viewgame___overОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- AH1Документ6 страницAH1game___overОценок пока нет
- AD780Документ10 страницAD780game___overОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Gaas Ic 5 Bit Digital Attenuator 1 DB LSB Positive Control 0.5-2.5 GHZДокумент5 страницGaas Ic 5 Bit Digital Attenuator 1 DB LSB Positive Control 0.5-2.5 GHZgame___overОценок пока нет
- TRIE Trees: Search Engines Genome Analysis Data AnalyticsДокумент6 страницTRIE Trees: Search Engines Genome Analysis Data AnalyticsDarshan MadeshОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Patran 2008 r1 Reference Manual Part 1: Basic FunctionsДокумент676 страницPatran 2008 r1 Reference Manual Part 1: Basic FunctionsKevin100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Integration With Zoho CRMДокумент34 страницыIntegration With Zoho CRMAdithyaОценок пока нет
- Documentation of Course Registration SystemДокумент19 страницDocumentation of Course Registration SystemDeepak Sharma83% (6)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- F5061 F6061 DB-25 Input ModulationДокумент2 страницыF5061 F6061 DB-25 Input ModulationandrewptateОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Module 4 and 5Документ4 страницыModule 4 and 5BYUanime PHОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Fifth Workshop On Software Quality Analysis, Monitoring, Improvement, and Applications SQAMIA 2016Документ110 страницFifth Workshop On Software Quality Analysis, Monitoring, Improvement, and Applications SQAMIA 2016Abdul Shakoor sabirОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Course Name: Data Structure and Algorithms Course Code: CS224 Credit HRS: 04 Pre-Requisite: CS214 Course Introduction and ObjectiveДокумент5 страницCourse Name: Data Structure and Algorithms Course Code: CS224 Credit HRS: 04 Pre-Requisite: CS214 Course Introduction and ObjectiveasadОценок пока нет
- ITCH - Numark Shortcut Insert - v1.0Документ2 страницыITCH - Numark Shortcut Insert - v1.0JorgeCisnerosGallegosОценок пока нет
- Full Download South Western Federal Taxation 2019 Comprehensive 42nd Edition by David M Maloney Ebook PDFДокумент41 страницаFull Download South Western Federal Taxation 2019 Comprehensive 42nd Edition by David M Maloney Ebook PDFtim.garcia450100% (30)
- Hercules - User Reference Guide: Hercules System/370, ESA/390, Z/architecture EmulatorДокумент665 страницHercules - User Reference Guide: Hercules System/370, ESA/390, Z/architecture EmulatorrithwikОценок пока нет
- Exercise 6.1: Restful Api Access: Student@Lfs458-Node-1A0A: $ Kubectl Config ViewДокумент2 страницыExercise 6.1: Restful Api Access: Student@Lfs458-Node-1A0A: $ Kubectl Config ViewtektitemoОценок пока нет
- Sena Quick Start Guide - 50SДокумент1 страницаSena Quick Start Guide - 50SGaryОценок пока нет
- Bug Bounty Hunting Roadmap For Beginners by DigitokawnДокумент10 страницBug Bounty Hunting Roadmap For Beginners by DigitokawnPranav PLОценок пока нет
- GeoStudio Add-Ins Upgrade GuideДокумент11 страницGeoStudio Add-Ins Upgrade GuideJennifer Miller0% (1)
- SAP FICO - F.05 - Foreign Currency ValuationДокумент12 страницSAP FICO - F.05 - Foreign Currency Valuationgeorgebabyc100% (4)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- ShammakhДокумент2 страницыShammakhشماخОценок пока нет
- IT - OT Cybersecurity-The Great DivideДокумент49 страницIT - OT Cybersecurity-The Great Dividepresto prestoОценок пока нет
- (BurpSuiteMastery) LabManualV3 1514182492549Документ14 страниц(BurpSuiteMastery) LabManualV3 1514182492549Luis TellezОценок пока нет
- State Based Scheduling Analysys For Distibuted Real Time SystemsДокумент18 страницState Based Scheduling Analysys For Distibuted Real Time SystemsHeriberto AguirreОценок пока нет
- DDM Cad For Solidworks Training ManualДокумент72 страницыDDM Cad For Solidworks Training ManualDiego ReggianiniОценок пока нет
- Simsolid DatasheetДокумент2 страницыSimsolid DatasheetADVOKASI PPI MALAYSIAОценок пока нет
- Oofp: Mapping The Oose Models Into Function Points: Rules, Tool and Case StudyДокумент6 страницOofp: Mapping The Oose Models Into Function Points: Rules, Tool and Case StudyIJMERОценок пока нет
- Unit 1: Arguments For Choosing SAP S/4HANA System ConversionДокумент8 страницUnit 1: Arguments For Choosing SAP S/4HANA System ConversionMiodrag MarinkovićОценок пока нет
- Assignment 4 Coen - 317Документ2 страницыAssignment 4 Coen - 317harry potterОценок пока нет
- E Commerce SecurityДокумент28 страницE Commerce SecurityRaja Haríì RajpootОценок пока нет
- Mplus DiagrammerДокумент3 страницыMplus Diagrammermichele settanniОценок пока нет
- Polytechnic University of The Philippines Lopez Quezon, BranchДокумент17 страницPolytechnic University of The Philippines Lopez Quezon, BranchPatrick Luis CantaraОценок пока нет
- Foozles - Anatomy of A Programming Language FadДокумент10 страницFoozles - Anatomy of A Programming Language FadinueveОценок пока нет
- Data Transfer, SortingДокумент3 страницыData Transfer, SortingPragathishОценок пока нет