Вам также может понравиться
- Dynamic Characterisation OF A Flexible Manipulator System: Theory and ExperimentsДокумент6 страницDynamic Characterisation OF A Flexible Manipulator System: Theory and ExperimentsselvamОценок пока нет
- Ultrasonic MotorДокумент11 страницUltrasonic MotorShivang AgrawalОценок пока нет
- Miniature Piezoelectric Mobile Robot Driven by StandingWaveДокумент6 страницMiniature Piezoelectric Mobile Robot Driven by StandingWaveHassan HaririОценок пока нет
- Magnetic Bearings Theory and ApplicationsДокумент140 страницMagnetic Bearings Theory and ApplicationsYüksel Kurtalan100% (2)
- Design and Analysis of A Compliant Parallel Pan-Tilt Platform 2015Документ12 страницDesign and Analysis of A Compliant Parallel Pan-Tilt Platform 2015newkid2202Оценок пока нет
- Decentralized PI/PD Position Control For Active Magnetic BearingsДокумент7 страницDecentralized PI/PD Position Control For Active Magnetic BearingsMuhammadОценок пока нет
- The Performance of One-Way Clutch in A Cam-Based Infinitely Variable TransmissionДокумент15 страницThe Performance of One-Way Clutch in A Cam-Based Infinitely Variable TransmissionOday IbraheemОценок пока нет
- Design and Implementation of Conventional and Advanced Controllers For Magnetic Bearing System StabilizationДокумент27 страницDesign and Implementation of Conventional and Advanced Controllers For Magnetic Bearing System Stabilizationharis shehzadОценок пока нет
- Ultra Sonic MotorsДокумент20 страницUltra Sonic MotorspraneethОценок пока нет
- 2 Muhammad RehanДокумент7 страниц2 Muhammad Rehanengrzee5516Оценок пока нет
- 00asme Maas Schulte FroehlekeДокумент16 страниц00asme Maas Schulte Froehlekeanoopk222Оценок пока нет
- High-Speed and High-Precision Tracking Control Ofultrahigh-Acceleration Moving-Permanent-Magnetlinear Synchronous MotoДокумент9 страницHigh-Speed and High-Precision Tracking Control Ofultrahigh-Acceleration Moving-Permanent-Magnetlinear Synchronous MotoDoru DumitracheОценок пока нет
- Dynamic Performance Analysis of A Full Toroidal IVT A Theoretical ApproachДокумент11 страницDynamic Performance Analysis of A Full Toroidal IVT A Theoretical ApproachAbir MukherjeeОценок пока нет
- 1.control of Magnetically Levitated RotorsДокумент12 страниц1.control of Magnetically Levitated RotorsTechno GamingОценок пока нет
- Fyp Related PaperДокумент10 страницFyp Related PaperhinaОценок пока нет
- Mechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperДокумент8 страницMechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperHo Nhat LinhОценок пока нет
- Mechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperДокумент8 страницMechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperraghulthoppaeОценок пока нет
- Mechanism For Precise Linear and Angular AdjustmentДокумент12 страницMechanism For Precise Linear and Angular Adjustmentג'ון ירוקОценок пока нет
- Article PDFДокумент6 страницArticle PDFNabeel DawodОценок пока нет
- Jeas 0408 94Документ7 страницJeas 0408 94Jun Chee LimОценок пока нет
- Design and Control of A Directly-Driven Bond Head For Thermosonic BondingДокумент11 страницDesign and Control of A Directly-Driven Bond Head For Thermosonic BondingRockerss RockerssОценок пока нет
- Twin Rotor Observer ImplementationДокумент7 страницTwin Rotor Observer Implementationtidjani86Оценок пока нет
- Design of The Miniature Maglev Using Hybrid Magnets in Magnetic Levitation SystemДокумент4 страницыDesign of The Miniature Maglev Using Hybrid Magnets in Magnetic Levitation SystemErmin FazlicОценок пока нет
- Kom Unit 1Документ5 страницKom Unit 1M.ThirunavukkarasuОценок пока нет
- Neural Network Sliding-Mode Position Controller For Induction Servo DriveДокумент12 страницNeural Network Sliding-Mode Position Controller For Induction Servo DriveumerОценок пока нет
- A Robust A: Real-Time Implementation of Adaptive Controller Robotic Manipulator Based Digital Signal ProcessorsДокумент11 страницA Robust A: Real-Time Implementation of Adaptive Controller Robotic Manipulator Based Digital Signal ProcessorsVasu DevОценок пока нет
- Motion Control of Single Link Flexible Joint Robot Manipulator Using ANFIS MATLAB SimulationДокумент10 страницMotion Control of Single Link Flexible Joint Robot Manipulator Using ANFIS MATLAB SimulationMiddle East Journal of Applied Science & TechnologyОценок пока нет
- 2001 Kaan HighspeedCNCsystemdesign - Partijerklimitedtrajectorygenerationandquinticsplineinterpolation IJMTДокумент24 страницы2001 Kaan HighspeedCNCsystemdesign - Partijerklimitedtrajectorygenerationandquinticsplineinterpolation IJMTdavidblasko01Оценок пока нет
- Novel Clamping Force Control For Electric Parking Brake SystemsДокумент6 страницNovel Clamping Force Control For Electric Parking Brake SystemsAhmed AlostazОценок пока нет
- Pendulum Positioning System Actuated by Dual Motorized PropellersДокумент4 страницыPendulum Positioning System Actuated by Dual Motorized Propellerspatmos666Оценок пока нет
- Optimal Control With Input Shaping For Input Tracking and Vibration Suppression of A Flexible Joint ManipulatorДокумент17 страницOptimal Control With Input Shaping For Input Tracking and Vibration Suppression of A Flexible Joint Manipulatormagdi elmalekОценок пока нет
- Developmentanddynamicmodellingofaflexure Based PDFДокумент22 страницыDevelopmentanddynamicmodellingofaflexure Based PDFDenise NelsonОценок пока нет
- Modal Analysis High Speed SpindleДокумент7 страницModal Analysis High Speed Spindlenm2007kОценок пока нет
- Mechanism and Machine Theory: Ying Wu, Kaiping Yu, Jian Jiao, Rui ZhaoДокумент29 страницMechanism and Machine Theory: Ying Wu, Kaiping Yu, Jian Jiao, Rui ZhaoYazdan RastegarОценок пока нет
- DVNHFRGNДокумент10 страницDVNHFRGNashikhmd4467Оценок пока нет
- 7117ijics02 PDFДокумент10 страниц7117ijics02 PDFijicsjournalОценок пока нет
- IMAC XV 15th Int 15-49-3 Optimization Techniques RotordynamicsДокумент7 страницIMAC XV 15th Int 15-49-3 Optimization Techniques Rotordynamicsuamiranda3518Оценок пока нет
- Self Balancing Two Wheeled Robot ReportДокумент11 страницSelf Balancing Two Wheeled Robot Reportnetlvr0Оценок пока нет
- Supplementary Material For: Controlled Flight of A Biologically Inspired, Insect-Scale RobotДокумент14 страницSupplementary Material For: Controlled Flight of A Biologically Inspired, Insect-Scale RobotsamanОценок пока нет
- Tuma Icsv19Документ8 страницTuma Icsv19scribdkhatnОценок пока нет
- Published Nusys DausДокумент10 страницPublished Nusys DausDragan ErcegОценок пока нет
- Describe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingДокумент8 страницDescribe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingJiten Thakur100% (1)
- ! Deep Learning Application of Vibration Data For Predictive Maintenance of Gravity Acceleration EquipmentДокумент15 страниц! Deep Learning Application of Vibration Data For Predictive Maintenance of Gravity Acceleration Equipmentهندسة الإنتاج والتصميم الميكانيكيОценок пока нет
- Positioning Control of One Link Arm With Parametric Uncertainty Using Quantitative Feedback TheoryДокумент10 страницPositioning Control of One Link Arm With Parametric Uncertainty Using Quantitative Feedback TheorySenthil KumarОценок пока нет
- Pneumatic PositionerДокумент9 страницPneumatic Positionerno nameejjОценок пока нет
- The Development of Hexapod Kinematic Machine: Keywords: Parallel Kinematic Structure, Control System, CNC Machine ToolДокумент4 страницыThe Development of Hexapod Kinematic Machine: Keywords: Parallel Kinematic Structure, Control System, CNC Machine ToolMilan Ynwa JovicicОценок пока нет
- Centrifugal Force Compensation of A Two-Wheeled Balancing RobotДокумент6 страницCentrifugal Force Compensation of A Two-Wheeled Balancing RobotAs'ad Syamsul ArifinОценок пока нет
- Paternoster 11 Geometric 2Документ7 страницPaternoster 11 Geometric 2Alexandra Elena BalanoiuОценок пока нет
- Rjwood Icra05Документ8 страницRjwood Icra05Pavan PrakashОценок пока нет
- Modeling and Simulation of Inverted Pendulum System Using Matlab: OverviewДокумент4 страницыModeling and Simulation of Inverted Pendulum System Using Matlab: OverviewMuhammad Zubair SheikhОценок пока нет
- Experimental Investigation of Robust Motion Tracking Control For A 2-DOF Flexure-Based MechanismДокумент9 страницExperimental Investigation of Robust Motion Tracking Control For A 2-DOF Flexure-Based MechanismAnjireddy ThatiparthyОценок пока нет
- George Constantinesco Torque Converter Analysis by Simulink PDFДокумент6 страницGeorge Constantinesco Torque Converter Analysis by Simulink PDFslysoft.20009951Оценок пока нет
- Control of An Omnidirectional Walking SimulatorДокумент14 страницControl of An Omnidirectional Walking SimulatorLONG Trương MinhОценок пока нет
- Journal of Sound and Vibration: Changjoo Shin, Chinsuk Hong, Weui Bong JeongДокумент13 страницJournal of Sound and Vibration: Changjoo Shin, Chinsuk Hong, Weui Bong Jeongبن الدين قويدرОценок пока нет
- Testing and Apparatus Essais Et AppareilsДокумент26 страницTesting and Apparatus Essais Et AppareilsEdy TejedaОценок пока нет
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsОт EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsОценок пока нет
- Variable Frequency Transformers for Large Scale Power Systems Interconnection: Theory and ApplicationsОт EverandVariable Frequency Transformers for Large Scale Power Systems Interconnection: Theory and ApplicationsРейтинг: 5 из 5 звезд5/5 (1)
- Cellular Actuators: Modularity and Variability in Muscle-inspired ActuationОт EverandCellular Actuators: Modularity and Variability in Muscle-inspired ActuationОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- Admission Registration Guide For Foreigners (Special Admission in Spring Semester 2016)Документ6 страницAdmission Registration Guide For Foreigners (Special Admission in Spring Semester 2016)Nevermore ShadowFiendОценок пока нет
- Capacitors Demystified Ee133Документ6 страницCapacitors Demystified Ee133Micro EmissionОценок пока нет
- Black BookДокумент4 страницыBlack BookNasser MohammedОценок пока нет
- Productflyer - 978 3 540 24451 6 PDFДокумент1 страницаProductflyer - 978 3 540 24451 6 PDFNevermore ShadowFiendОценок пока нет
- Level 2 Lesson 1: Future TenseДокумент3 страницыLevel 2 Lesson 1: Future Tensedomon46Оценок пока нет
- Level 2 Lesson 1: Future TenseДокумент3 страницыLevel 2 Lesson 1: Future Tensedomon46Оценок пока нет
- 2014 KGSP University Information (English) (Modifying) PDFДокумент7 страниц2014 KGSP University Information (English) (Modifying) PDFNevermore ShadowFiendОценок пока нет
- 2014 KGSP University Information (English) (Modifying) PDFДокумент7 страниц2014 KGSP University Information (English) (Modifying) PDFNevermore ShadowFiendОценок пока нет
- 2006 Finite Element Analysis MCEN 4173/5173Документ2 страницы2006 Finite Element Analysis MCEN 4173/5173Nevermore ShadowFiendОценок пока нет
- Ans Ope PDFДокумент98 страницAns Ope PDFNevermore ShadowFiendОценок пока нет
- MATLAB SimulinkДокумент89 страницMATLAB SimulinkMoorthi Velu88% (16)
- Agsni PDFДокумент7 страницAgsni PDFNevermore ShadowFiendОценок пока нет
- Asme Imece2012 PDFДокумент4 страницыAsme Imece2012 PDFNevermore ShadowFiendОценок пока нет
- 2014 Summer School (Eng) PDFДокумент3 страницы2014 Summer School (Eng) PDFNevermore ShadowFiendОценок пока нет
- College of Engineering - UOZ Department of Petroleum Engineering Reservoir Fluid Properties Stage: Three Student NamesДокумент20 страницCollege of Engineering - UOZ Department of Petroleum Engineering Reservoir Fluid Properties Stage: Three Student NamesShaaban HassanОценок пока нет
- CondenserДокумент5 страницCondensersandeshОценок пока нет
- Penawaran Overhoul Engine Acera 6.4Документ1 страницаPenawaran Overhoul Engine Acera 6.4Aneh Bin AjaibОценок пока нет
- ASME Pressure Vessel Design PDFДокумент62 страницыASME Pressure Vessel Design PDFhilwan sultonОценок пока нет
- Eaton - Gen 3 (Auto & UltraShift) .18 Speed With Push Button (AutoShift)Документ5 страницEaton - Gen 3 (Auto & UltraShift) .18 Speed With Push Button (AutoShift)Diego LiraОценок пока нет
- Válvula de Seguridad Anderson Greenwood Crosby - La Rosita - Jos-EДокумент66 страницVálvula de Seguridad Anderson Greenwood Crosby - La Rosita - Jos-EJose Flores100% (2)
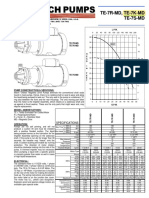
- Manual March Te-7k-MdДокумент2 страницыManual March Te-7k-MdjoseОценок пока нет
- Fea 2 Marks and AnswersДокумент20 страницFea 2 Marks and AnswerssnvijayanОценок пока нет
- Anillo Líquido 3Документ4 страницыAnillo Líquido 3carlosОценок пока нет
- Rover 75 ATF Fluid ChangeДокумент11 страницRover 75 ATF Fluid ChangeRichardОценок пока нет
- 2nd Midterm12-13Документ16 страниц2nd Midterm12-13Apaar PandeyОценок пока нет
- Component Codes Component TitlesДокумент6 страницComponent Codes Component TitlesJennifer BellОценок пока нет
- A Review On Battery Thermal Management System of Electric VehicleДокумент5 страницA Review On Battery Thermal Management System of Electric VehiclePrafull ShindeОценок пока нет
- Physics Project: Topic: To Study Simple Harmonic MotionДокумент7 страницPhysics Project: Topic: To Study Simple Harmonic Motiongorilla soupОценок пока нет
- Lab 2 Cantilever Shear Force Apparatus and Simply Supported BeamsДокумент11 страницLab 2 Cantilever Shear Force Apparatus and Simply Supported BeamsChing Wai YongОценок пока нет
- WINMAN Solenoid Valf (5/2 Yollu, 5/3 Yollu) / Solenoid Valve (5/2 Way, 5/3 Way)Документ2 страницыWINMAN Solenoid Valf (5/2 Yollu, 5/3 Yollu) / Solenoid Valve (5/2 Way, 5/3 Way)Durulsan MakinaОценок пока нет
- Twin Screw Compressor Performance and Its Relationship With RotorДокумент7 страницTwin Screw Compressor Performance and Its Relationship With RotorSaeedAkbarzadehОценок пока нет
- Continuous Beam PDFДокумент12 страницContinuous Beam PDFRupakDasОценок пока нет
- Yamaha ServiceДокумент57 страницYamaha ServicesantonsОценок пока нет
- Catalogos BombasДокумент12 страницCatalogos BombasJose NavarreteОценок пока нет
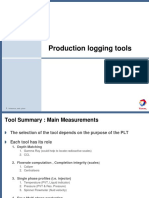
- Production Logging Tools - Total Company PDFДокумент36 страницProduction Logging Tools - Total Company PDFبوشناق بوشناقОценок пока нет
- PHYSICS (CE & ME) (PH-21102) Introduction To Mechanics: Module 1: (8 Lectures)Документ1 страницаPHYSICS (CE & ME) (PH-21102) Introduction To Mechanics: Module 1: (8 Lectures)Supratim RoyОценок пока нет
- CH 5 Kerja Dan EnergiДокумент21 страницаCH 5 Kerja Dan EnergiDey TandirerungОценок пока нет
- Marblevator, Wave: InstructablesДокумент29 страницMarblevator, Wave: InstructablesGCОценок пока нет
- Structures Module 3 Notes FullДокумент273 страницыStructures Module 3 Notes Fulljohnmunjuga50Оценок пока нет
- Split Type AcuДокумент40 страницSplit Type AcuKristine Ann ReclosadoОценок пока нет
- Local Checks 1Документ85 страницLocal Checks 1Alphyl BalasabasОценок пока нет
- Flow Divertor Ball Valve DN20 - DN32 - DN50: DescriptionДокумент3 страницыFlow Divertor Ball Valve DN20 - DN32 - DN50: Description윤병택Оценок пока нет
- Stallion MK II & IIIДокумент31 страницаStallion MK II & IIIgokulmane117Оценок пока нет
- Easa Ar100 2006 PDFДокумент33 страницыEasa Ar100 2006 PDFChecho Buenaventura100% (1)