Вам также может понравиться
- FEHM Final June 2016Документ96 страницFEHM Final June 2016Fatchur RizalОценок пока нет
- Chevron Regulatory Report 11102014 FINAL - Post PDFДокумент126 страницChevron Regulatory Report 11102014 FINAL - Post PDFYuvaraj NithyanandamОценок пока нет
- JSA #37-Flange ReplacementДокумент1 страницаJSA #37-Flange ReplacementSanjeet SinghОценок пока нет
- Cause Mapping® Investigation Template - General - Vbeta1cДокумент24 страницыCause Mapping® Investigation Template - General - Vbeta1csercalsaОценок пока нет
- Safety and Runaway Prevention in BatchДокумент10 страницSafety and Runaway Prevention in BatchKrunal GangawaneОценок пока нет
- Best Practices For Installing Safety ValvesДокумент6 страницBest Practices For Installing Safety ValvesAndhika HerdiawanОценок пока нет
- Root Cause Analysis RCA Investigation Guide PDFДокумент8 страницRoot Cause Analysis RCA Investigation Guide PDFMohammad Reza Najafi100% (1)
- Types of Human ErrorДокумент2 страницыTypes of Human ErrorPankaj PaulОценок пока нет
- I Keep My Barrier StrongДокумент2 страницыI Keep My Barrier StrongEnaCicaaaОценок пока нет
- DP Personnel Guidance For Professional Development PDFДокумент26 страницDP Personnel Guidance For Professional Development PDFDarko BozicОценок пока нет
- Job Safety Analysis Sheet: Pre - WorkДокумент2 страницыJob Safety Analysis Sheet: Pre - Workmalimsaidi_160040895100% (1)
- 14 - Opprinneleig 6 Day 2 - Reliability Centred Maintenance - Crane Conference 2012Документ27 страниц14 - Opprinneleig 6 Day 2 - Reliability Centred Maintenance - Crane Conference 2012Hicham Tou NsiОценок пока нет
- MocДокумент45 страницMoclokhandeatul1100% (2)
- Hazard HuntДокумент1 страницаHazard HuntGrace PassiniОценок пока нет
- RR 436Документ70 страницRR 436Jas Philip MОценок пока нет
- Data Sheet - HPR 410, Hydroacoustic Position Reference System - SSBLДокумент2 страницыData Sheet - HPR 410, Hydroacoustic Position Reference System - SSBLGleison Prateado100% (1)
- Bibby Topaz Incident PresentationДокумент9 страницBibby Topaz Incident PresentationChan Teck MingОценок пока нет
- Equipment TroubleshootДокумент13 страницEquipment TroubleshootManel Montesinos100% (1)
- MSA Gas Detection HandbookДокумент146 страницMSA Gas Detection HandbookVid YullОценок пока нет
- Supervisors - and - Managers - Safety - Audit - Training v.3.3Документ44 страницыSupervisors - and - Managers - Safety - Audit - Training v.3.3Mohamed LotfiОценок пока нет
- Root Cause Failure Analysis PDFДокумент308 страницRoot Cause Failure Analysis PDFcippolippo123Оценок пока нет
- Internship SafetyДокумент34 страницыInternship SafetyDakshit ItaliaОценок пока нет
- Improving Compliance With ProceduresДокумент66 страницImproving Compliance With ProceduresAndrew DolbyОценок пока нет
- HSE Directive No. 35 Processing of Undesired Incidents and ExemptionsДокумент22 страницыHSE Directive No. 35 Processing of Undesired Incidents and ExemptionsakubestlahОценок пока нет
- The Checklist - A Tool For Error Management and Performance ImprovementДокумент5 страницThe Checklist - A Tool For Error Management and Performance ImprovementGustavo Catalan RuzaОценок пока нет
- Appendix B Example Flowchart For The Identification of Safety Critical Systems and Spare PartsДокумент1 страницаAppendix B Example Flowchart For The Identification of Safety Critical Systems and Spare PartsSeelan SurendranОценок пока нет
- EFD25EC5 BasicH2STrainingSampleДокумент40 страницEFD25EC5 BasicH2STrainingSampleprakashОценок пока нет
- 15 - Hazardous AreasДокумент8 страниц15 - Hazardous AreasDave CОценок пока нет
- Chevron OEДокумент9 страницChevron OESundar Kumar Vasantha GovindarajuluОценок пока нет
- Machine GuardingДокумент54 страницыMachine GuardingAbderrahmane LarbiОценок пока нет
- Dry Chemical PowderДокумент4 страницыDry Chemical Powdervisio20040% (1)
- Ewcat PDFДокумент22 страницыEwcat PDFMohsen YavariОценок пока нет
- 135 Guidelines For Classification and Categorization of Well Control Incidents and Well Integrity IncidentsДокумент20 страниц135 Guidelines For Classification and Categorization of Well Control Incidents and Well Integrity IncidentsAndrems SeremsОценок пока нет
- Human Element WebДокумент8 страницHuman Element WebJorge Gómez del CastilloОценок пока нет
- 0121 Towing: 1. GeneralДокумент6 страниц0121 Towing: 1. GeneralJeet SinghОценок пока нет
- PSM Concordance TableДокумент7 страницPSM Concordance Tableherik100% (1)
- 15.1 Safety Management: Contractor Management System: 15.1.1 PurposeДокумент13 страниц15.1 Safety Management: Contractor Management System: 15.1.1 Purposesyedahmad39Оценок пока нет
- Inspection and Maintenance of SCBA - TLPДокумент6 страницInspection and Maintenance of SCBA - TLPEstúdio BlackBeardОценок пока нет
- Safeguarding of Machinery and Plant PDFДокумент66 страницSafeguarding of Machinery and Plant PDFraysub159Оценок пока нет
- Safety MomentДокумент5 страницSafety Momenttarek_bouzayaniОценок пока нет
- ORBIT Offshore User ManualДокумент77 страницORBIT Offshore User ManualPak LongОценок пока нет
- Risk Analysis Refueling Nozzles RA Refuelling Nozzles - Generic Rev3Документ39 страницRisk Analysis Refueling Nozzles RA Refuelling Nozzles - Generic Rev3api-3752216100% (1)
- Standard Operating ProcedureДокумент4 страницыStandard Operating ProcedureJAY BHAVSARОценок пока нет
- 6 Thinking About Where Failure Will Happen: Questions About Your OrganizationДокумент8 страниц6 Thinking About Where Failure Will Happen: Questions About Your OrganizationRauf HuseynovОценок пока нет
- Beam Pump - Safe Operation Guideline PDFДокумент43 страницыBeam Pump - Safe Operation Guideline PDFwilzy74Оценок пока нет
- 9 Principles of Modern MaintenanceДокумент9 страниц9 Principles of Modern MaintenancedejanОценок пока нет
- Implementation of STOP For Supervisors - PDO & ContractorsДокумент29 страницImplementation of STOP For Supervisors - PDO & ContractorsjcastroroblesОценок пока нет
- CMMS StrategyДокумент12 страницCMMS StrategyDia Putranto HarmayОценок пока нет
- Critical Equipment Identification and MaintenanceДокумент10 страницCritical Equipment Identification and MaintenanceSyed Mustafa HussainОценок пока нет
- Waterborne Underwater Hulll CleaningДокумент68 страницWaterborne Underwater Hulll CleaningRadu PandaОценок пока нет
- Tescom RegulatorДокумент4 страницыTescom RegulatormiaberyОценок пока нет
- Chevron LPSAДокумент9 страницChevron LPSAanon_413680978Оценок пока нет
- Vacon Driven14 FinalДокумент19 страницVacon Driven14 FinalppguptasОценок пока нет
- RCA-Adapting 5-Whys, Fishbone, and Other Methods in PROACT - Reliability Center IncДокумент7 страницRCA-Adapting 5-Whys, Fishbone, and Other Methods in PROACT - Reliability Center IncHafsa JalalОценок пока нет
- DPC - Risk - Failure Is An Option - Phillips - 2007Документ14 страницDPC - Risk - Failure Is An Option - Phillips - 2007RoyОценок пока нет
- Wartsila DP Maintenance Course Manual - Rev AДокумент305 страницWartsila DP Maintenance Course Manual - Rev AHrОценок пока нет
- DP Systems Chapter 5Документ13 страницDP Systems Chapter 5Lachin Kike100% (1)
- New Petrobras Concepts For WSOG (Well Specific Operating Guidelines)Документ16 страницNew Petrobras Concepts For WSOG (Well Specific Operating Guidelines)Xa MauОценок пока нет
- Marine Technology Society: Dynamic Positioning Conference 21 - 22, October, 1997Документ3 страницыMarine Technology Society: Dynamic Positioning Conference 21 - 22, October, 1997Luis PerezОценок пока нет
- How To Maintain A VFDДокумент4 страницыHow To Maintain A VFDAlex WangОценок пока нет
- Esquema Eletrico Cat 312 (Esc055) Uenr54220001Документ18 страницEsquema Eletrico Cat 312 (Esc055) Uenr54220001JOAO BATISTA DA SILVA BatistaОценок пока нет
- 2324model Proposal Report 1Документ21 страница2324model Proposal Report 1Han hoОценок пока нет
- Annex List For EurocodesДокумент2 страницыAnnex List For EurocodesKha PhucОценок пока нет
- As ISO 8930-2005 General Principles On Reliability of Structures - List of Equivalent TermsДокумент6 страницAs ISO 8930-2005 General Principles On Reliability of Structures - List of Equivalent TermsSAI Global - APACОценок пока нет
- Amg Eqe 53 4M PM10Документ2 страницыAmg Eqe 53 4M PM10izzat.abdulhamidОценок пока нет
- ALCOA Plus 9 Principles For Data IntegrityДокумент24 страницыALCOA Plus 9 Principles For Data IntegrityMd Amdadul HoqueОценок пока нет
- ArrayДокумент9 страницArrayDEv KaushalОценок пока нет
- Fully Automated Attendance SystemДокумент30 страницFully Automated Attendance SystemManikyam HemalathaОценок пока нет
- ISTQB Foundation Certification Exam (Q1-200)Документ49 страницISTQB Foundation Certification Exam (Q1-200)bias20000% (1)
- Modo Servicio Bizhub C250 y C252Документ5 страницModo Servicio Bizhub C250 y C252Miki Perez WarОценок пока нет
- My Motivation To Apply To The Masters of Electrical Engineering Program - (Essay Example), 392 Words GradesFixerДокумент2 страницыMy Motivation To Apply To The Masters of Electrical Engineering Program - (Essay Example), 392 Words GradesFixerIlyes BenchehidaОценок пока нет
- The Ultimate Seo Guide 2021Документ26 страницThe Ultimate Seo Guide 2021api-559033966Оценок пока нет
- Richard Patterson Building Broadband Network in 2019 UKNOF RESIZEDДокумент32 страницыRichard Patterson Building Broadband Network in 2019 UKNOF RESIZEDjjkkkОценок пока нет
- Big Data in FintechДокумент21 страницаBig Data in Fintechakanksha_ambitionОценок пока нет
- Arduino Starter Kit Manual v1.6Документ38 страницArduino Starter Kit Manual v1.6SeunOlubunmi100% (1)
- Recording Spirit M8 ReviewДокумент4 страницыRecording Spirit M8 ReviewPriscilla Bajomo100% (2)
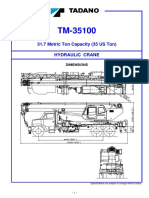
- TM 35100 TM-35100: 31.7 Metric Ton Capacity (35 US Ton) Hydraulic CraneДокумент11 страницTM 35100 TM-35100: 31.7 Metric Ton Capacity (35 US Ton) Hydraulic CraneEder Rodriguez GonzalezОценок пока нет
- Ic Pross Son Os8804a1aq PDFДокумент10 страницIc Pross Son Os8804a1aq PDFAndre VP0% (1)
- Normativ TunelДокумент67 страницNormativ TunelMihai Zaharia0% (1)
- Face DetectionДокумент23 страницыFace Detectionnimarose 1175% (4)
- Single-Chip Low-Power FM Receiver For Portable DevicesДокумент19 страницSingle-Chip Low-Power FM Receiver For Portable DevicesdarkОценок пока нет
- 90281-IPv4 Firewall Rule Configuration On Cisco SA540 Security ApplianceДокумент6 страниц90281-IPv4 Firewall Rule Configuration On Cisco SA540 Security ApplianceRuddy ChaoОценок пока нет
- MCA OU SyllabusДокумент55 страницMCA OU Syllabusnslchandu100% (1)
- Programmable Logic ControllerДокумент23 страницыProgrammable Logic Controllergebrerufael hailayОценок пока нет
- Service Bulletin: Firmware Upgrade (Upgrade Pack Ver. V1.02) FS-6030MFP, FS-6025MFP, FS-6025MFP/BДокумент1 страницаService Bulletin: Firmware Upgrade (Upgrade Pack Ver. V1.02) FS-6030MFP, FS-6025MFP, FS-6025MFP/Bdorcelli1234Оценок пока нет
- WMB-X230 Installation ManualДокумент80 страницWMB-X230 Installation ManualJesús UrrietaОценок пока нет
- Women SafetyДокумент6 страницWomen Safetyanon_318625233Оценок пока нет
- Unit III Management Information System Notes Unit 3Документ13 страницUnit III Management Information System Notes Unit 3Farhad HossainОценок пока нет
- FABM1 Exercise Workbook For StudentДокумент69 страницFABM1 Exercise Workbook For StudentCarel AgustinОценок пока нет
- Cybersecurity RoadmapДокумент4 страницыCybersecurity RoadmapRishi KaulОценок пока нет