Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- EEG-Based Communication and Control: Short-Term Role of FeedbackДокумент5 страницEEG-Based Communication and Control: Short-Term Role of Feedbackdamaya1701Оценок пока нет
- Advances in Engineering Software: Gabriel A. Wainer, Mariana C. D'AbreuДокумент16 страницAdvances in Engineering Software: Gabriel A. Wainer, Mariana C. D'Abreudamaya1701Оценок пока нет
- Light Trapping in Silicon Nanowire Solar Cells: Erik Garnett and Peidong YangДокумент13 страницLight Trapping in Silicon Nanowire Solar Cells: Erik Garnett and Peidong Yangdamaya1701Оценок пока нет
- 00001476Документ8 страниц00001476damaya1701Оценок пока нет
- Step 7 Pid Temperature Control 7193Документ102 страницыStep 7 Pid Temperature Control 7193hellboylovingОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Levante Sistemas de Automatización y Control S.L.: CatálogosДокумент437 страницLevante Sistemas de Automatización y Control S.L.: CatálogosHoa DuongОценок пока нет
- Powerroc T25: Atlas Copco Surface Drill RigsДокумент4 страницыPowerroc T25: Atlas Copco Surface Drill RigsalmirОценок пока нет
- Specifications - MERCEDES-BENZ 818 L 4X2 4220 Chassis CabinДокумент4 страницыSpecifications - MERCEDES-BENZ 818 L 4X2 4220 Chassis CabinCarlos de los RiosОценок пока нет
- HECTOR BrochureДокумент43 страницыHECTOR BrochurenegsОценок пока нет
- Lessor Finding 41 - Engine #2 Reverser Inneer Barrel and Outer Barrel Found Oxiddation DepositДокумент13 страницLessor Finding 41 - Engine #2 Reverser Inneer Barrel and Outer Barrel Found Oxiddation DepositSurya Agung S NОценок пока нет
- B.G. CB Ed 6en BLG Operating MechanismДокумент24 страницыB.G. CB Ed 6en BLG Operating MechanismShailenderОценок пока нет
- My Experience in Drafting The Layout of An LV Switchgear Equipment Inside InstallationsДокумент21 страницаMy Experience in Drafting The Layout of An LV Switchgear Equipment Inside InstallationsBruno SamosОценок пока нет
- Back To Basics - Car Audio 101 - Battery and AltenatorДокумент4 страницыBack To Basics - Car Audio 101 - Battery and AltenatorMax BeeksОценок пока нет
- Loadcenters-Panelboards PRL1,2,3 y 4Документ14 страницLoadcenters-Panelboards PRL1,2,3 y 4Jorge Ignacio MVОценок пока нет
- The Book of (PLC & SCADA) Dosing System by HMIДокумент102 страницыThe Book of (PLC & SCADA) Dosing System by HMIAwidhi KresnawanОценок пока нет
- Shunt Reactor SizingДокумент4 страницыShunt Reactor Sizingrajfab100% (5)
- BT100 User Manual PDFДокумент56 страницBT100 User Manual PDFfurqan zafarОценок пока нет
- 00 F 5 Sebk 320Документ40 страниц00 F 5 Sebk 320Mr.K chОценок пока нет
- Sabroe SAB283EДокумент2 страницыSabroe SAB283Edavid hОценок пока нет
- Iluminat PhlilipsДокумент402 страницыIluminat PhlilipsKazan BarladОценок пока нет
- 673-12 XTI Service ManualДокумент335 страниц673-12 XTI Service ManualRichard WharmbyОценок пока нет
- BN - 5687 Hexalobular Socket Pan Head Machine Screws Fully Threaded (A2)Документ3 страницыBN - 5687 Hexalobular Socket Pan Head Machine Screws Fully Threaded (A2)MSD ENGRОценок пока нет
- Electrical TWD-ModelДокумент1 страницаElectrical TWD-ModelzeshanjamilОценок пока нет
- Sepam - I0 - (Io) Inputs For CSH30 and CSH120 - CSH200 - FAQs PDFДокумент2 страницыSepam - I0 - (Io) Inputs For CSH30 and CSH120 - CSH200 - FAQs PDFNADEEM KHANОценок пока нет
- LJ Chlorinator C2212 en ETДокумент5 страницLJ Chlorinator C2212 en ETdalton2004Оценок пока нет
- Product CatalogsДокумент12 страницProduct Catalogscab666Оценок пока нет
- Cat c27c32Документ3 страницыCat c27c32Catalina HuenumanОценок пока нет
- LG Digital SignageДокумент21 страницаLG Digital SignageYazan RamezОценок пока нет
- Kubota U30-5 04-2013Документ184 страницыKubota U30-5 04-2013Anderson Lira100% (1)
- Idec O-I Intruction ManualДокумент559 страницIdec O-I Intruction ManualHai NguyenОценок пока нет
- 5G Indoor Blade Power EPS100D-N01D1 (01074612) Datasheet 04 - (2019071...Документ2 страницы5G Indoor Blade Power EPS100D-N01D1 (01074612) Datasheet 04 - (2019071...adrienОценок пока нет
- User Manual: Apple Carplay Android AutoДокумент16 страницUser Manual: Apple Carplay Android Autojjcoding codingteam100% (1)
- Wabco Brakes General HandbookДокумент20 страницWabco Brakes General HandbookRahul Malhotra100% (3)
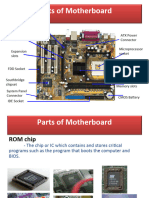
- Parts of Mother BoardДокумент17 страницParts of Mother BoardHans De la CruzОценок пока нет
- Ibafob-D: in BriefДокумент2 страницыIbafob-D: in Briefjovanma8585100% (1)